









摘 要
农业是我国必不可缺的一部份,近年来人口增长过快,一些蔬菜的种植量在不断增加。在这个机械化的时代,人工播种的方法显然不在合适,人工播种无法精确控制株距,并且会造成种子的浪费。为了解决这种情况设计了一款适用于多数地域的半机械化的播种机,可以在不同的地形和环境进行工作,还可以调节播种距离。一台设备可根据蔬菜生长因素来合理调节株距,从而对不同蔬菜进行播种,并且结构简单、设计巧妙、体积小、易操作、效率高。如果投入使用,那么农民们的工作量将会减小。
关键词:排种轮; 播种; 蔬菜; 地轮
结构组成
在小规模地域,丘陵或山地工作时,拖拉机式的播种机无法在这种环境工作,如果用传统播种方式,需要的播种时间长、强度高,其播种质量也不保准。本文设计的小型播种施肥机,它主要由架子,播种(肥料)系统,接地工作部分组成,可以同时对土地进行播种和施肥,其被称为半机械化播种。其所用的内部零件都是大众话的,是到处都可以买到的,这样一是可以节约成本,二来操作简单。
图1播种机模型
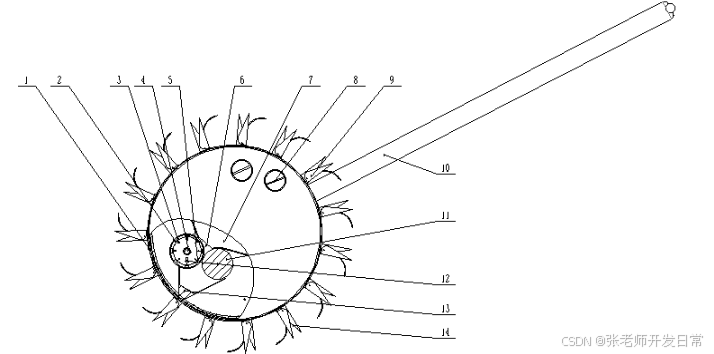
图2播种机正视图
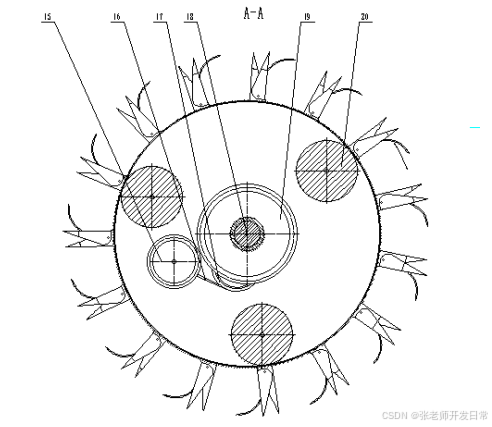
图3播种机后视图
播种机的结构设计
1 零件的设计
1.1 行走地轮的设计
根据机体工程学原理,播种机旋转部分的半径不应太大,高度应控制在520mm之内,所以地轮的外径取500mm,地轮的内径为496 mm,因为它必须具有一定的宽度来承受播种时所有的内力与外力。考虑播种机内部将有一个种子箱和一个肥料箱,应为种子箱和肥料箱保留一部分空间,所以总宽度为110mm。
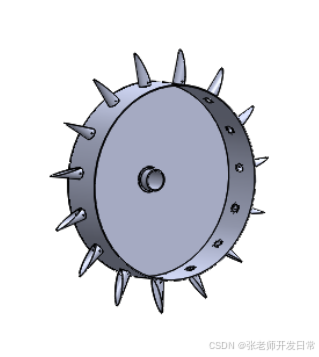
图1行走地轮正视图
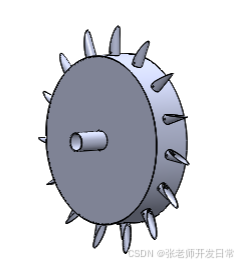
图2行走地轮后视图
传动部分设计
1 齿轮传动设计
行走地轮与种箱之间的存在一组传动齿轮。其作用是使排种轮上的排种槽与地轮上的鸭嘴对应。
以排种轮上10个鸭嘴为例,排种轮上装有8个排种槽,要使每个槽中种子恰好落入鸭嘴中,那么当地轮转动时排种轮必须转动,所以所用齿轮组的传动比i=5:4。齿轮中心距a等于种箱中心与排种轮中心的距离为180mm。

(3-9) (3-10)
由公式(1)、(2)可得Z1=100,Z2=80。
所以所选用模数为2,齿数为10和8的直尺圆柱齿轮[16]。
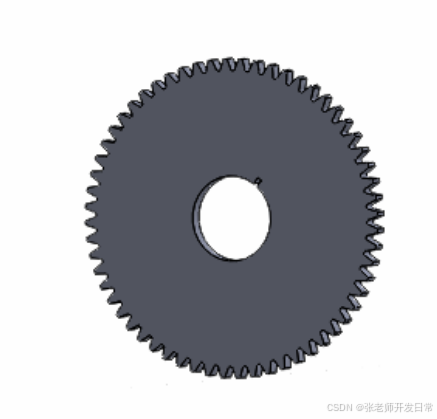
图齿轮1三维图
结 论
本次通过对播种机的排种轮设计,已经可以适用玉米、大豆等常用蔬菜的播种。行走地轮经过不断的改进已经可以适用各种地形,种箱与肥箱的容积在有限的空间内达到了最大化,在排种轮中添加了一些简单机械结构使其具有了推种的功能,排种轮部分的传动装置经过不断的改进达到了预期的精度,并且在与行走地轮配合工作时的误差基本为零。设计的斜坡式接种漏斗使种子不会丢失。结构设计非常合理,在使用时做到了低强度,高效率。最终实现了精确播种、可调间距、可播种多种蔬菜、省力、低成本。
参考文献
[1] John Iovine. Artificial pneumatic muscle[J]. Poptronics, 2000,1( 11):49-65
[2] Graham-Rowe, Duncan. Power dressing[J]. New Scientist, 2002, 174( 5):1-2
[3] 高云亮. 浅析我国播种机的现状和发展[M]. 农业机械,2004. 8:18-22
[4] 孙齐磊,赵洪林,张晓辉. 排种器的现状与发展[J]. 山东农机,2002, 1( 2):5-10
[5] 刘光华. 现代材料化学[M]. 上海:上海科学技术出版社,2000:36-46
[6] 巩云鹏, 田万禄. 机械设计课程设计[M]. 沈阳:东北大学出版社,2000:33-3
[7] 张辽. 现代加工技术[M]. 北京:机械工业出版社,2002:25-35
[8] 齐国光. 机械制造学[M]. 北京:石油大学出版社,1996:35-37
[9] 农业部全国农作物种子质量监督检验测试中心. 农作物种子检验员考核学习读本[M]. 北京:中国工商出版社,2006:23-45
[10] 孙桓,陈作模. 机械原理[M].北京:高等教育出版社,2000:56-65
[11] 刘鸿文. 材料力学[M]. 北京:高等教育出版社,1991:10-15
[12] 汪恺. 机械设计标准应用手册/第二卷[M]. 北京:机械工业出版社,1997.8: 35-37
[13] 濮良贵, 纪名刚. 机械设计(第七版)[M]. 北京:高等教育出版社,2001:22-30
[14]《机械设计手册》联合编写组编. 机械设计手册[M]. 北京:化学工业出版社,1979:45-50
[15] 吕永智. 公差配合与技术测量[M]. 北京:机械工程出版社,2001:36-45
[16] 濮良贵, 纪名刚. 机械设计(第七版)[M]. 北京:高等教育出版社, 2000:40-45
[17] 郭奇亮. 机械零件课程设计[M]. 贵州:贵州人民出版社,1982.1:33-35
[18] Hisato Kobayashi,Hideo Nakamura,Takufumi Shimada. An Inspection Robot for Feeder Cables basic structure and control[J]. IECON,2002,1(2):992-995
[19] 胡锦. 单片机技术实用教程[M]. 北京: 高等教育出版社,2003:125-127


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









