







任务概述
本项目旨在设计和仿真麦克尔逊干涉仪,涵盖以下主要任务:
- 学习麦克尔逊干涉仪光路及其在精密测量中的应用。
- 学习Matlab仿真编程的基本思想。
- 模拟定域干涉下的等倾干涉条纹。
- 模拟定域干涉下的等厚干涉条纹。
- 利用光学附件搭建麦克尔逊干涉仪光路,并将干涉图样利用CCD采集,与模拟图样进行对比分析。
要求
- 掌握光学理论基本原理。
- 掌握基本光学仪器和光学元件的使用。
- 掌握麦克尔逊光路原理。
- 掌握Matlab仿真软件。
- 熟练使用CCD采集干涉图样并用Matlab对比分析。
1. 麦克尔逊干涉仪光路及其在精密测量中的应用
1.1 麦克尔逊干涉仪简介
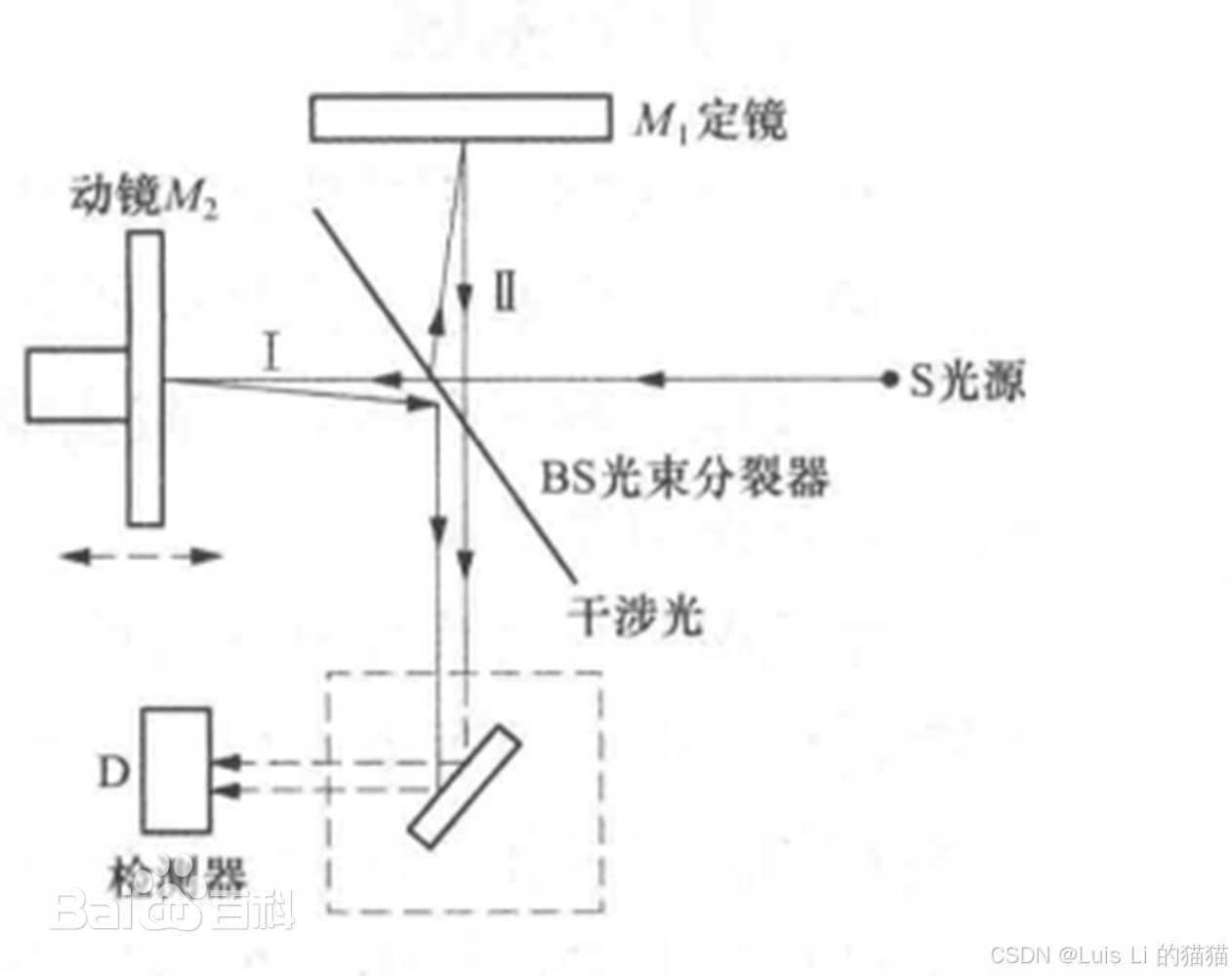
麦克尔逊干涉仪由阿尔伯特·A·麦克尔逊(Albert A. Michelson)在19世纪末发明,是一种常用的干涉仪,用于测量光程差、折射率变化、表面形状等。其基本结构包括:
- 光源:通常为单色光源,如激光。
- 分束镜(Beam Splitter):将入射光分成两束,一束反射,一束透射。
- 反射镜(Mirrors):分别反射分束后的两束光。
- 汇束镜(Recombiner):将反射后的两束光重新组合,产生干涉图样。
- 检测器(CCD等):捕捉干涉条纹。
1.2 光路原理
- 光源发出的光被分束镜分为两束光,分别沿不同方向传播。
- 两束光在各自的路径上反射镜反射后返回分束镜。
- 在分束镜处,两束光重新组合,因光程差的存在而产生干涉条纹。
- 干涉条纹被检测器捕捉,用于分析光程差或其他测量参数。
1.3 应用
- 长度测量:高精度测量微小位移或长度变化。
- 折射率测量:测量材料的折射率变化。
- 表面形状检测:检测光学元件表面的平整度和曲率。
- 干涉仪校准:作为其他精密测量仪器的基准。
2. Matlab仿真编程基本思想
Matlab是一种广泛用于数值计算、可视化和编程的高性能语言。在干涉仪仿真中,Matlab可以用于模拟光的传播、干涉条纹的生成和分析。
2.1 基本步骤
- 定义参数:设置光源波长、光束路径、反射镜位置等参数。
- 光波建模:使用复数或振幅表示光波。
- 计算干涉:叠加两束光波,计算干涉结果。
- 生成图像:将干涉结果转化为图像形式,展示干涉条纹。
- 参数调整:提供可调参数,以观察不同条件下的干涉条纹变化。
2.2 Matlab函数和工具
meshgrid:生成二维网格。imshow、imagesc:显示图像。fft、ifft:快速傅里叶变换,用于频域分析。- 用户界面工具(如
uicontrol)用于创建可调参数界面。
3. 模拟定域干涉下的等倾干涉条纹
等倾干涉(Equal Inclination Interference)指的是两束光在相同倾斜角度下干涉,常用于测量角度偏差或表面形状。
3.1 理论基础
当两束具有相同倾斜角度的平行光相遇时,由于相位差的存在,会在干涉区域形成条纹。条纹的间距与倾斜角度和光源波长相关。
3.2 Matlab仿真步骤
-
参数设定:
- 波长(λ)
- 干涉区域的大小(图像分辨率)
- 倾斜角度(θ)
- 光程差(Δ)
% 参数设定 lambda = 632.8e-9; % 波长(米),例如红色He-Ne激光 L = 1e-3; % 干涉区域半长(米) N = 1000; % 图像分辨率 theta = 5 * pi / 180; % 倾斜角度(弧度) delta = 0; % 光程差(米) I0 = 1; % 最大强度 % 生成网格 [X, Y] = meshgrid(linspace(-L, L, N), linspace(-L, L, N)); % 计算光程差 delta_x = L * tan(theta); phase_diff = (2 * pi / lambda) * (delta_x * X / L); % 计算干涉强度 I = I0 * (1 + cos(phase_diff)); % 显示干涉条纹 figure; imagesc(linspace(-L, L, N)*1e3, linspace(-L, L, N)*1e3, I); colormap(gray); colorbar; axis equal; xlabel('X (mm)'); ylabel('Y (mm)'); title('等倾干涉条纹');参数调整
用户可以调整以下参数以观察干涉条纹的变化:
- 波长(lambda):改变条纹的间距。
- 倾斜角度(theta):改变条纹的密度和方向。
- 干涉区域大小(L):影响图像的显示范围。
- 图像分辨率(N):影响条纹的细腻程度。
4. 模拟定域干涉下的等厚干涉条纹
等厚干涉(Equal Thickness Interference)通常用于测量材料的厚度或光程差的变化。通过控制光束在不同路径上的反射镜位置,实现等厚干涉。
4.1 理论基础
当两束光在相同厚度的路径上传播并重新组合时,光程差主要由材料的厚度和折射率决定。条纹的间距与光程差和波长相关。
4.2 Matlab仿真步骤
-
参数设定:
- 波长(λ)
- 干涉区域的大小(图像分辨率)
- 光程差(Δ)
- 反射镜的位置偏移(δ)
% 参数设定 lambda = 632.8e-9; % 波长(米),例如红色He-Ne激光 L = 1e-3; % 干涉区域半长(米) N = 1000; % 图像分辨率 delta = 1e-6; % 光程差(米) I0 = 1; % 最大强度 % 生成网格 [X, Y] = meshgrid(linspace(-L, L, N), linspace(-L, L, N)); % 计算相位差 phase_diff = (2 * pi / lambda) * delta; % 计算干涉强度 I = I0 * (1 + cos(phase_diff)) * ones(size(X)); % 可选:添加微小扰动以显示条纹 % 例如,模拟轻微的表面不平整导致的光程差变化 delta_variation = 1e-7 * sin(2 * pi * X / (L/5)); I = I0 * (1 + cos(phase_diff + (2 * pi / lambda) * delta_variation)); % 显示干涉条纹 figure; imagesc(linspace(-L, L, N)*1e3, linspace(-L, L, N)*1e3, I); colormap(gray); colorbar; axis equal; xlabel('X (mm)'); ylabel('Y (mm)'); title('等厚干涉条纹');参数调整
用户可以调整以下参数以观察干涉条纹的变化:
- 波长(lambda):改变条纹的间距。
- 光程差(delta):改变条纹的亮暗对比度。
- 干涉区域大小(L):影响图像的显示范围。
- 图像分辨率(N):影响条纹的细腻程度。
- 扰动参数(如delta_variation的幅度和频率):模拟实际条件下的条纹变化。
5. 搭建麦克尔逊干涉仪光路与干涉图样采集及分析
5.1 搭建光路
所需光学元件
- 单色光源:如He-Ne激光器。
- 分束镜:50:50分束比的玻璃分束镜。
- 反射镜:两个高反射率的平面镜。
- 汇束镜:与分束镜相同。
- 支架和台架:用于固定光学元件,确保光路稳定。
- CCD相机:用于捕捉干涉条纹。
- 调节旋钮:用于微调反射镜位置。
光路搭建步骤
- 安装光源:将激光器固定在台架一端,确保光束水平发出。
- 安装分束镜:将分束镜固定在光源前方,使光束垂直入射。
- 安装反射镜:
- 将两个反射镜分别安装在分束镜的反射和透射路径上,确保两束光路长度相同或可调节。
- 汇束:反射后的两束光在分束镜处重新组合,形成干涉图样。
- 安装CCD相机:将CCD相机对准干涉区域,确保清晰捕捉到干涉条纹。
- 调节:微调反射镜的位置和角度,优化干涉条纹的清晰度和对比度。
5.2 CCD采集干涉图样
步骤
- 连接CCD相机:将CCD相机连接至计算机,确保驱动程序安装完毕。
- 设置曝光参数:根据光源强度和干涉条纹亮度,调整曝光时间和增益。
- 捕捉图像:使用相应的软件(如Matlab的Image Acquisition Toolbox)捕捉干涉图样,并保存为图像文件。
% 确保安装Image Acquisition Toolbox % 连接并配置CCD相机 % 创建视频对象 vid = videoinput('winvideo', 1, 'RGB24_640x480'); % 根据具体相机调整 src = getselectedsource(vid); vid.FramesPerTrigger = 1; triggerconfig(vid, 'manual'); % 启动预览 preview(vid); % 触发并获取一帧 trigger(vid); img = getdata(vid, 1); % 关闭预览和对象 closepreview(vid); delete(vid); clear vid; % 转换为灰度图 gray_img = rgb2gray(img); % 显示图像 figure; imshow(gray_img); title('采集到的干涉条纹');5.3 模拟图样与实测图样对比分析
分析步骤
-
预处理图像:
- 对采集到的干涉图样进行灰度化、去噪等预处理。
- 对模拟图样进行相同处理。
-
特征提取:
- 提取条纹间距、方向、对比度等特征。
-
比较分析:
- 使用相关系数、均方误差(MSE)等指标量化模拟图样与实测图样的相似度。
- 分析差异原因,如光源稳定性、光路对准误差、环境干扰等。
% 读取实测图像
measured_img = imread('measured_fringe.png'); % 替换为实际文件名
measured_gray = rgb2gray(measured_img);
% 读取模拟图像
simulated_img = imread('simulated_fringe.png'); % 替换为实际文件名
simulated_gray = rgb2gray(simulated_img);
% 预处理
measured_processed = imresize(measured_gray, [N N]); % 确保尺寸一致
simulated_processed = imresize(simulated_gray, [N N]);
% 归一化
measured_norm = double(measured_processed) / 255;
simulated_norm = double(simulated_processed) / 255;
% 计算相关系数
corr_coeff = corr2(measured_norm, simulated_norm);
fprintf('相关系数: %.4f\n', corr_coeff);
% 计算均方误差
mse_val = immse(measured_norm, simulated_norm);
fprintf('均方误差: %.6f\n', mse_val);
% 显示对比
figure;
subplot(1,2,1);
imshow(measured_processed);
title('实测干涉条纹');
subplot(1,2,2);
imshow(simulated_processed);
title('模拟干涉条纹');
分析与优化
根据对比结果,进行以下优化:
- 光路调整:确保分束镜和反射镜的精确对准,减少光程差误差。
- 光源稳定性:使用高稳定性的光源,减少振动和频闪对干涉条纹的影响。
- 环境控制:减少环境温度、气流等对干涉仪的干扰。
- 数据处理:采用更先进的图像处理算法,提高分析精度


















 3964
3964

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









