






这里提供一些选择题知识点整理
16、机器人遍历最小值
原题
- 集合位置多个机器人分布在M*N(10≤M,N≤1000)的方格中,一个方格可能有多个机器人。
- 规定每个机器人只能向上下左右的相邻方格移动,每移动一个方格需要消耗1个单位能量。
- 现在要求所有机器人集合,集合点只能是某个机器人初始所在方格。现在请找一个集合点,使得所有机器人到达该点消耗的总能量最低。
- 输入说明:第一行是一个整数K(0<K≤100),表示有机器人的方格数量。之后K行表示初始状态有机器人的方格位置(x,y|1≤x<M,1≤y<N)和方格内的机器人数量n,以空格隔开。
输出没有说明,猜测要最佳目标点和最低能量
格式可能是列表,可能有其他要求
读题:
1.取值范围
10≤M,N≤1000
不涉及数值溢出
也就是可以暴力的把每一个都算一遍,然后找出最小的那个,也就是用遍历
整数K(0<K≤100)
整数范围之内,不需要特殊处理
(x,y|1≤x<M,1≤y<N)
同理,没超过int
2.能量计算规则
规定每个机器人只能向上下左右的相邻方格移动,每移动一个方格需要消耗1个单位能量。
只能上下左右相邻方格移动情况下的最短路径,就是小学数学的数格子
数一数纵向的距离,再数一数横向的距离
如图
- 假设有两个点
- A是目标位置
- N是当前位置
- 他们并不重合
- 我们要计算两者之间的距离是多少
从N出发到与A齐平,一格一格往前数,是6步
从转折位置向左走,总共是10步
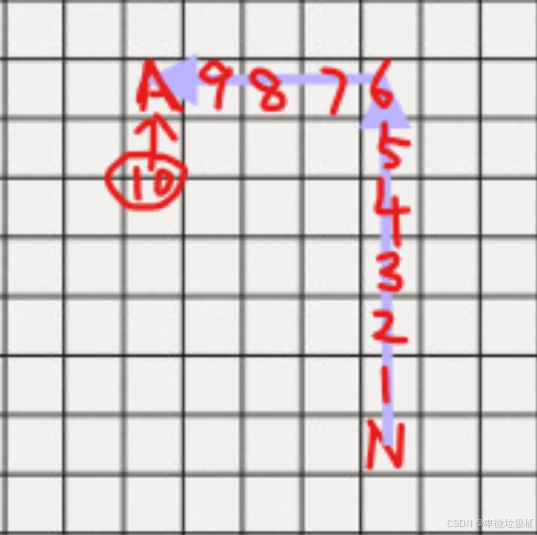
,每移动一个方格需要消耗1个单位能量。
也就是说,刚才从N到A一共走了10步,一步一个能量,就是10能量
一个方格可能有多个机器人
说明一些点会重合
假如N上有两个机器人
那么N到A的路程就会被走两次,我们在计算总共的距离时,需要将这个点的路程*2
以此类推
其他点以此类推
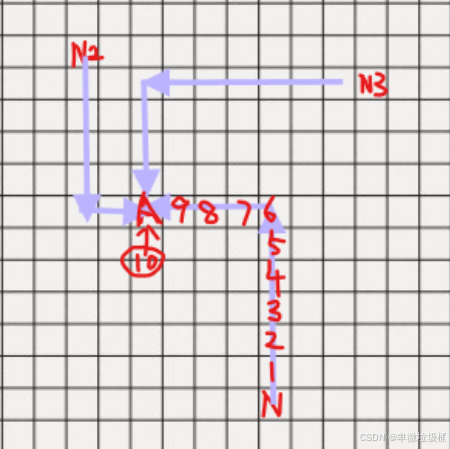
所有步的相加,就是所有机器人到目标的能量
这里不需要用列表
3.计算范围
集合点只能是某个机器人初始所在方格
这里限定范围,范围是所有机器人的初始位置
所有机器人到达该点消耗的总能量最低。
输出条件是总能量最低
也就是说,我们要遍历所有点到目标点的距离
因为最后我们不涉及排序,不涉及比较,
最后只保留计算后的值,在最后保留数值就OK
4.输入输出格式
第一行是一个整数K(0<K≤100),表示有机器人的方格数量
输入一个K,不涉及数值溢出
可以直接用K=int(input())
之后K行表示初始状态有机器人的方格位置(x,y|1≤x<M,1≤y<N)和方格内的机器人数量n,以空格隔开。
输入一行数据 第一个是机器人所在的横坐标,第二个机器人所在的是纵坐标,第三个是机器人数量
这里要用列表输入,列表命名为rb,robots机器人。
后续坐标需要单独提出来,放在新的列表里面,命名为rbP,robots point
总结
- 取值范围
- 都在int的范围内
- 对于遍历没有影响
-
计算方式
- 获得坐标,机器人数
- 设计切换目标点的代码
- 计算每个点到目标位置的x坐标和y坐标,然后加和
- 如果一个点上有两个机器人,要把路径乘两遍,有3个就乘3遍
- 判断只不是最小距离,并选择要不要储存
- 输出最小值
- 计算涉及(x,y,n)三个数值,代表横坐标,纵坐标,和机器人数
-
输入与输出
- 系统输入一个K
- 系统输入一行(x,y,n)代表横坐标,纵坐标,和机器人数,使用列表,列表命名为rbP,也就是robot positions机器人位置的简写
代码实现
从计算条件开始,最后处理输入条件
代码全貌
def get_min(rbP):
# 初始化能量最小值,使用 float('inf') 作为初始最大值
minE = float('inf')
# 初始化最佳目标点,设置为 None,因为稍后将存储一个坐标元组
bestP = None
# 遍历每一个可能的集合点
for p in rbP:
# 提取当前候选集合点的坐标 (aimX, aimY)
aimX, aimY, _ = p
# 初始化总能量为 0
totalE = 0
# 遍历所有机器人位置,计算到当前目标点的距离,并加权累加到 totalE 中
for (x, y, n) in rbP:
totalE += (abs(x - aimX) + abs(y - aimY)) * n
# 如果当前计算出的总能量小于之前的最小能量,则更新最小能量和最佳目标点
if totalE < minE:
minE = totalE
bestP = (aimX, aimY)
# 返回最低能量消耗和最佳目标点的位置
return minE, bestP
# 从用户输入获取 K 的值,即要处理多少个机器人位置数据
K = int(input())
# 初始化空列表用于存储所有机器人位置数据
rbP = []
# 循环读取 K 行输入,每行包括 x, y 和 n,然后添加到 rbP 列表中
for _ in range(K):
x, y, n = map(int, input().split())
rbP.append((x, y, n))
# 调用函数并输出结果
resE, bestP = get_min(rbP)
print(resE, bestP)
1. 函数的详细解释
定义函数
# 定义函数get_min以获得最小值,将读入的数据列表rbP 放进计算方式里
def get_min(rbP):
初始化值
# 初始化能量最小值,energy min 所以命名minE
# float('inf')是python内置的最大值,float('inf')就是最小值,写None也可以但是后续要加条件,推荐用 float('inf')
minE=float('inf')
# 初始化最佳目标点,也就是最佳路径点 best position 也就是bestP,这里只能写None,因为这里之后是存列表的,不是存值的
bestP=None
遍历每一个目标点
for p in rbP:
# 把xy拿出来,命名为目标xy aimX,aimY,然后给机器人数量一个变量防止报错
#python可以多个变量同时命名
进行初始化
aimX,aimY,_=p
# 初始化计算所有点到当前目标点的距离,命名totalE,也就是toatal energy总共的能量
totalE =0
算所有的点到目标点的距离,并把重复的路径多乘,最后得到totalE
for(x,y,n) in rbP:
写计算流程
# abs 求绝对值
# x, y分开计算,因为不能让机器人走斜线
# abs 是绝对差,就是当前x到目标x的距离
totalE+=sum(abs(x-aimX)+abs(y-aimY))*n
if totalE <minE :
minE=totalE
bestP=(aimX,aimY)
算出totalE之后判断和minE的相比,totalE是多还是少,如果少就赋值给minE,minE的赋值是无限大,所以不需要考虑初始要不要多加条件去处理
然后储存当前目标点,要以元组的形式储存,因为看起来更好看
并且题目没有给输出格式,所以我们默认用最好看的模式输出
之后跳出循环,并返回以上操作后的最低点和最低能量
return minE bestP
1. 输入的详细解释
单纯K输入
# 从用户输入获取 K 的值,即要处理多少个机器人位置数据
K = int(input())
初始化数值,做空列表
# 初始化空列表用于存储所有机器人位置数据
rbP = []
空列表不能直接读输入的数据
因为会变成读了一行字符串,后期还要拆分,然后再次操作变成整数
# 循环读取 K 行输入,每行包括 x, y 和 n,然后添加到 rbP 列表中
for _ in range(K):
x, y, n = map(int, input().split())
rbP.append((x, y, n))
最后初始化结果·,并输出
这会输出两个值
# 调用函数并输出结果
resE, bestP = get_min(rbP)
print(resE, bestP)
print(get_min(rbP))会直接输出一个元组


















 653
653

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











