







% RF calibration data:None
% Range Detection Threshold (dB):15
% Doppler Detection Threshold (dB):15
% Range Peak Grouping:enabled
% Doppler Peak Grouping:enabled
% Static clutter removal:disabled
% Angle of Arrival FoV: Full FoV
% Range FoV: Full FoV
% Doppler FoV: Full FoV
% ***************************************************************
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 7 0
adcCfg 2 1
adcbufCfg -1 0 1 1 1
profileCfg 0 60 359 7 57.14 0 0 70 1 256 5209 0 0 158
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 0 0 0 0 0 2
chirpCfg 2 2 0 0 0 0 0 4
frameCfg 0 2 16 0 100 1 0
lowPower 0 0
guiMonitor -1 1 1 0 0 0 1
cfarCfg -1 0 2 8 4 3 0 15 1
cfarCfg -1 1 0 4 2 3 1 15 1
multiObjBeamForming -1 1 0.5
clutterRemoval -1 0
calibDcRangeSig -1 0 -5 8 256
extendedMaxVelocity -1 0
lvdsStreamCfg -1 0 0 0
compRangeBiasAndRxChanPhase 0.0 1 0 -1 0 1 0 -1 0 1 0 -1 0 1 0 -1 0 1 0 -1 0 1 0 -1 0
measureRangeBiasAndRxChanPhase 0 1.5 0.2
CQRxSatMonitor 0 3 5 121 0
CQSigImgMonitor 0 127 4
analogMonitor 0 0
aoaFovCfg -1 -90 90 -90 90
cfarFovCfg -1 0 0 8.92
cfarFovCfg -1 1 -1 1.00
calibData 0 0 0
sensorStart
上位机输出结果:
对应log:
mmwDemo:/>% ***************************************************************
Skipped
mmwDemo:/>% Created for SDK ver:03.06
Skipped
mmwDemo:/>% Created using Visualizer ver:3.6.0.0
Skipped
mmwDemo:/>% Frequency:60
Skipped
mmwDemo:/>% Platform:xWR68xx_AOP
Skipped
mmwDemo:/>% Scene Classifier:best_range_res
Skipped
mmwDemo:/>% Azimuth Resolution(deg):30 + 30
Skipped
mmwDemo:/>% Range Resolution(m):0.044
Skipped
mmwDemo:/>% Maximum unambiguous Range(m):9.02
Skipped
mmwDemo:/>% Maximum Radial Velocity(m/s):1
Skipped
mmwDemo:/>% Radial velocity resolution(m/s):0.13
Skipped
mmwDemo:/>% Frame Duration(msec):100
Skipped
mmwDemo:/>% RF calibration data:None
Skipped
mmwDemo:/>% Range Detection Threshold (dB):15
Skipped
mmwDemo:/>% Doppler Detection Threshold (dB):15
Skipped
mmwDemo:/>% Range Peak Grouping:enabled
Skipped
mmwDemo:/>% Doppler Peak Grouping:enabled
Skipped
mmwDemo:/>% Static clutter removal:disabled
Skipped
mmwDemo:/>% Angle of Arrival FoV: Full FoV
Skipped
mmwDemo:/>% Range FoV: Full FoV
Skipped
mmwDemo:/>% Doppler FoV: Full FoV
Skipped
mmwDemo:/>% ***************************************************************
Skipped
mmwDemo:/>sensorStop
Ignored: Sensor is already stopped
Done
mmwDemo:/>flushCfg
Done
mmwDemo:/>dfeDataOutputMode 1
Done
mmwDemo:/>channelCfg 15 7 0
Done
mmwDemo:/>adcCfg 2 1
Done
mmwDemo:/>adcbufCfg -1 0 1 1 1
Done
mmwDemo:/>profileCfg 0 60 359 7 57.14 0 0 70 1 256 5209 0 0 158
Done
mmwDemo:/>chirpCfg 0 0 0 0 0 0 0 1
Done
mmwDemo:/>chirpCfg 1 1 0 0 0 0 0 2
Done
mmwDemo:/>chirpCfg 2 2 0 0 0 0 0 4
Done
mmwDemo:/>frameCfg 0 2 16 0 100 1 0
Done
mmwDemo:/>lowPower 0 0
Done
mmwDemo:/>guiMonitor -1 1 1 0 0 0 1
Done
mmwDemo:/>cfarCfg -1 0 2 8 4 3 0 15 1
Done
mmwDemo:/>cfarCfg -1 1 0 4 2 3 1 15 1
Done
mmwDemo:/>multiObjBeamForming -1 1 0.5
Done
mmwDemo:/>clutterRemoval -1 0
Done
mmwDemo:/>calibDcRangeSig -1 0 -5 8 256
Done
mmwDemo:/>extendedMaxVelocity -1 0
Done
mmwDemo:/>lvdsStreamCfg -1 0 0 0
Done
mmwDemo:/>compRangeBiasAndRxChanPhase 0.0 1 0 -1 0 1 0 -1 0 1 0 -1 0 1 0 -1 0 1 0 -1 0 1 0 -1 0
Done
mmwDemo:/>measureRangeBiasAndRxChanPhase 0 1.5 0.2
Done
mmwDemo:/>CQRxSatMonitor 0 3 5 121 0
Done
mmwDemo:/>CQSigImgMonitor 0 127 4
Done
mmwDemo:/>analogMonitor 0 0
Done
mmwDemo:/>aoaFovCfg -1 -90 90 -90 90
Done
mmwDemo:/>cfarFovCfg -1 0 0 8.92
Done
mmwDemo:/>cfarFovCfg -1 1 -1 1.00
Done
mmwDemo:/>calibData 0 0 0
Done
mmwDemo:/>sensorStart
Debug: Init Calibration Status = 0x1ffe
Done
上位机发送配置指令时 串口发送结果:

version
queryDemoStatus
% ***************************************************************
% Created for SDK ver:03.06
% Created using Visualizer ver:3.6.0.0
% Frequency:60
% Platform:xWR68xx_AOP
% Scene Classifier:best_range_res
% Azimuth Resolution(deg):30 + 30
% Range Resolution(m):0.044
% Maximum unambiguous Range(m):9.02
% Maximum Radial Velocity(m/s):1
% Radial velocity resolution(m/s):0.13
% Frame Duration(msec):100
% RF calibration data:None
% Range Detection Threshold (dB):15
% Doppler Detection Threshold (dB):15
% Range Peak Grouping:enabled
% Doppler Peak Grouping:enabled
% Static clutter removal:disabled
% Angle of Arrival FoV: Full FoV
% Range FoV: Full FoV
% Doppler FoV: Full FoV
% ***************************************************************
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 7 0
adcCfg 2 1
adcbufCfg -1 0 1 1 1
profileCfg 0 60 359 7 57.14 0 0 70 1 256 5209 0 0 158
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 0 0 0 0 0 2
chirpCfg 2 2 0 0 0 0 0 4
frameCfg 0 2 16 0 100 1 0
lowPower 0 0
guiMonitor -1 1 1 0 0 0 1
cfarCfg -1 0 2 8 4 3 0 15 1
cfarCfg -1 1 0 4 2 3 1 15 1
multiObjBeamForming -1 1 0.5
clutterRemoval -1 0
calibDcRangeSig -1 0 -5 8 256
extendedMaxVelocity -1 0
lvdsStreamCfg -1 0 0 0
compRangeBiasAndRxChanPhase 0.0 1 0 -1 0 1 0 -1 0 1 0 -1 0 1 0 -1 0 1 0 -1 0 1 0 -1 0
measureRangeBiasAndRxChanPhase 0 1.5 0.2
CQRxSatMonitor 0 3 5 121 0
CQSigImgMonitor 0 127 4
analogMonitor 0 0
aoaFovCfg -1 -90 90 -90 90
cfarFovCfg -1 0 0 8.92
cfarFovCfg -1 1 -1 1.00
calibData 0 0 0
sensorStart
芯片返回到上位机的结果 串口数据:
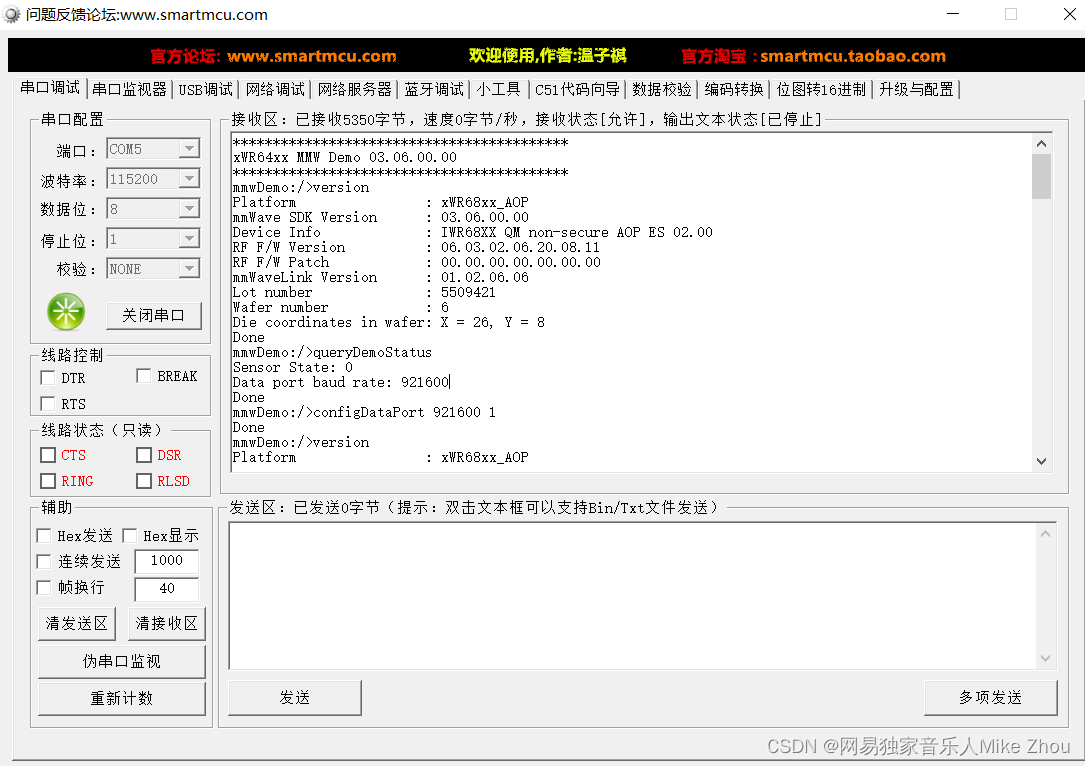
******************************************
xWR64xx MMW Demo 03.06.00.00
******************************************
mmwDemo:/>version
Platform : xWR68xx_AOP
mmWave SDK Version : 03.06.00.00
Device Info : IWR68XX QM non-secure AOP ES 02.00
RF F/W Version : 06.03.02.06.20.08.11
RF F/W Patch : 00.00.00.00.00.00.00
mmWaveLink Version : 01.02.06.06
Lot number : 5509421
Wafer number : 6
Die co
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









