







如果你也是看准了Python,想自学Python,在这里为大家准备了丰厚的免费学习大礼包,带大家一起学习,给大家剖析Python兼职、就业行情前景的这些事儿。
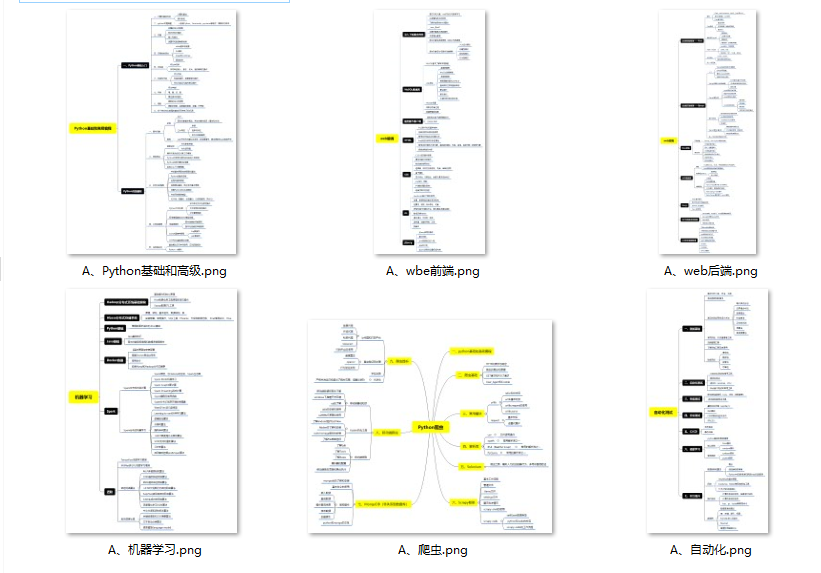
一、Python所有方向的学习路线
Python所有方向路线就是把Python常用的技术点做整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照上面的知识点去找对应的学习资源,保证自己学得较为全面。

二、学习软件
工欲善其必先利其器。学习Python常用的开发软件都在这里了,给大家节省了很多时间。

三、全套PDF电子书
书籍的好处就在于权威和体系健全,刚开始学习的时候你可以只看视频或者听某个人讲课,但等你学完之后,你觉得你掌握了,这时候建议还是得去看一下书籍,看权威技术书籍也是每个程序员必经之路。
四、入门学习视频
我们在看视频学习的时候,不能光动眼动脑不动手,比较科学的学习方法是在理解之后运用它们,这时候练手项目就很适合了。
四、实战案例
光学理论是没用的,要学会跟着一起敲,要动手实操,才能将自己的所学运用到实际当中去,这时候可以搞点实战案例来学习。

五、面试资料
我们学习Python必然是为了找到高薪的工作,下面这些面试题是来自阿里、腾讯、字节等一线互联网大厂最新的面试资料,并且有阿里大佬给出了权威的解答,刷完这一套面试资料相信大家都能找到满意的工作。

成为一个Python程序员专家或许需要花费数年时间,但是打下坚实的基础只要几周就可以,如果你按照我提供的学习路线以及资料有意识地去实践,你就有很大可能成功!
最后祝你好运!!!
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!

动画中青色点为搜索过的节点。
启发算法为二维欧几里得距离。
势场算法
下面是使用势场算法进行基于二维网格的路径规划。

动画中蓝色的热区图显示了每个格子的势能。
相关阅读:
机器人运动规划:势能函数
https://www.cs.cmu.edu/~motionplanning/lecture/Chap4-Potential-Field_howie.pdf
6.3 模型预测路径生成
下面是模型预测路径生成的路径优化示例。
算法用于状态晶格规划(state lattice planning)。
路径优化示例

查找表生成示例

相关阅读:
用于带轮子的机器人的最优不平整地形路径生成
http://journals.sagepub.com/doi/pdf/10.1177/0278364906075328
6.4 状态晶格规划
这个脚本使用了状态晶格规划(state lattice planning)实现路径规划。
这段代码通过模型预测路径生成来解决边界问题。
相关阅读:
用于带轮子的机器人的最优不平整地形路径生成
http://journals.sagepub.com/doi/pdf/10.1177/0278364906075328
用于复杂环境下的高性能运动机器人导航的可行运动的状态空间采样
http://www.frc.ri.cmu.edu/~alonzo/pubs/papers/JFR_08_SS_Sampling.pdf
均匀极性采样**(Uniform polar sampling)**

偏差极性采样(Biased polar sampling)

路线采样(Lane sampling)

6.5 随机路径图(PRM)规划

这个随机路径图(Probabilistic Road-Map,PRM)规划算法在图搜索上采用了迪杰斯特拉方法。
动画中的蓝点为采样点。
青色叉为迪杰斯特拉方法搜索过的点。
红线为PRM的最终路径。
相关阅读:
随机路径图
https://en.wikipedia.org/wiki/Probabilistic_roadmap
6.6 Voronoi路径图规划

这个Voronoi路径图(Probabilistic Road-Map,PRM)规划算法在图搜索上采用了迪杰斯特拉方法。
动画中的蓝点为Voronoi点。
青色叉为迪杰斯特拉方法搜索过的点。
红线为Voronoi路径图的最终路径。
相关阅读:
机器人运动规划
https://www.cs.cmu.edu/~motionplanning/lecture/Chap5-RoadMap-Methods_howie.pdf
6.7 快速搜索随机树(RRT)
基本RRT

这是个使用快速搜索随机树(Rapidly-Exploring Random Trees,RRT)的简单路径规划代码。
黑色圆为障碍物,绿线为搜索树,红叉为开始位置和目标位置。
RRT*

这是使用RRT*的路径规划代码。
黑色圆为障碍物,绿线为搜索树,红叉为开始位置和目标位置。
相关阅读:
最优运动规划的基于增量采样的算法
https://arxiv.org/abs/1005.0416
最优运动规划的基于采样的算法
http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.419.5503&rep=rep1&type=pdf
基于Dubins路径的RRT

为汽车形机器人提供的使用RRT和dubins路径规划的路径规划算法。
基于Dubins路径的RRT*

为汽车形机器人提供的使用RRT*和dubins路径规划的路径规划算法。
基于reeds-shepp路径的RRT*

为汽车形机器人提供的使用RRT*和reeds shepp路径规划的路径规划算法。
Informed RRT*

这是使用Informed RRT*的路径规划代码。
青色椭圆为Informed RRT*的启发采样域。
相关阅读:
Informed RRT*:通过对可接受的椭球启发的直接采样实现最优的基于采样的路径规划
https://arxiv.org/pdf/1404.2334.pdf
批量Informed RRT*

这是使用批量Informed RRT*的路径规划代码。
相关阅读:
批量Informed树(BIT*):通过对隐含随机几何图形进行启发式搜索实现基于采样的最优规划
https://arxiv.org/abs/1405.5848
闭合回路RRT*
使用闭合回路RRT*(Closed loop RRT*)实现的基于车辆模型的路径规划。

这段代码里,转向控制用的是纯追迹算法(pure-pursuit algorithm)。
速度控制采用了PID。
相关阅读:
使用闭合回路预测在复杂环境内实现运动规划
http://acl.mit.edu/papers/KuwataGNC08.pdf)
应用于自动城市驾驶的实时运动规划
http://acl.mit.edu/papers/KuwataTCST09.pdf
[1601.06326]采用闭合回路预测实现最优运动规划的基于采样的算法
https://arxiv.org/abs/1601.06326
LQR-RRT*
这是个使用LQR-RRT*的路径规划模拟。
LQR局部规划采用了双重积分运动模型。

相关阅读:
LQR-RRT*:使用自动推导扩展启发实现最优基于采样的运动规划
http://lis.csail.mit.edu/pubs/perez-icra12.pdf
MahanFathi/LQR-RRTstar:LQR-RRT*方法用于单摆相位中的随机运动规划
https://github.com/MahanFathi/LQR-RRTstar
6.8 三次样条规划
这是段三次路径规划的示例代码。
这段代码根据x-y的路点,利用三次样条生成一段曲率连续的路径。
每个点的指向角度也可以用解析的方式计算。



6.9 B样条规划

这是段使用B样条曲线进行规划的例子。
输入路点,它会利用B样条生成光滑的路径。
第一个和最后一个路点位于最后的路径上。
相关阅读:
B样条
https://en.wikipedia.org/wiki/B-spline
6.10 Eta^3样条路径规划

这是使用Eta ^ 3样条曲线的路径规划。
相关阅读:
eta^3-Splines for the Smooth Path Generation of Wheeled Mobile Robots
https://ieeexplore.ieee.org/document/4339545/
6.11 贝济埃路径规划
贝济埃路径规划的示例代码。
根据四个控制点生成贝济埃路径。

改变起点和终点的偏移距离,可以生成不同的贝济埃路径:

相关阅读:
根据贝济埃曲线为自动驾驶汽车生成曲率连续的路径
http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.294.6438&rep=rep1&type=pdf
6.12 五次多项式规划
利用五次多项式进行路径规划。

它能根据五次多项式计算二维路径、速度和加速度。
相关阅读:
用于Agv In定位的局部路径规划和运动控制
http://ieeexplore.ieee.org/document/637936/
6.13 Dubins路径规划
Dubins路径规划的示例代码。

相关阅读:
Dubins路径
https://en.wikipedia.org/wiki/Dubins_path
6.14 Reeds Shepp路径规划
Reeds Shepp路径规划的示例代码。

相关阅读:
15.3.2 Reeds-Shepp曲线
http://planning.cs.uiuc.edu/node822.html
用于能前进和后退的汽车的最优路径
https://pdfs.semanticscholar.org/932e/c495b1d0018fd59dee12a0bf74434fac7af4.pdf
ghliu/pyReedsShepp:实现Reeds Shepp曲线
https://github.com/ghliu/pyReedsShepp
6.15 基于LQR的路径规划
为双重积分模型使用基于LQR的路径规划的示例代码。

6.16 Frenet Frame中的最优路径

这段代码在Frenet Frame中生成最优路径。
青色线为目标路径,黑色叉为障碍物。
红色线为预测的路径。
相关阅读:
Frenet Frame中的动态接到场景中的最优路径生成
https://www.researchgate.net/profile/Moritz_Werling/publication/224156269_Optimal_Trajectory_Generation_for_Dynamic_Street_Scenarios_in_a_Frenet_Frame/links/54f749df0cf210398e9277af.pdf
Frenet Frame中的动态接到场景中的最优路径生成
https://www.youtube.com/watch?v=Cj6tAQe7UCY
七、路径跟踪
7.1 姿势控制跟踪
这是姿势控制跟踪的模拟。

相关阅读:
Robotics, Vision and Control - Fundamental Algorithms In MATLAB® Second, Completely Revised, Extended And Updated Edition | Peter Corke | Springer
https://www.springer.com/us/book/9783319544120
7.2 纯追迹跟踪
使用纯追迹(pure pursuit)转向控制和PID速度控制的路径跟踪模拟。

红线为目标路线,绿叉为纯追迹控制的目标点,蓝线为跟踪路线。
相关阅读:
城市中的自动驾驶汽车的运动规划和控制技术的调查
https://arxiv.org/abs/1604.07446
7.3 史坦利控制
使用史坦利(Stanley)转向控制和PID速度控制的路径跟踪模拟。

相关阅读:
史坦利:赢得DARPA大奖赛的机器人
http://robots.stanford.edu/papers/thrun.stanley05.pdf
用于自动驾驶机动车路径跟踪的自动转向方法
https://www.ri.cmu.edu/pub_files/2009/2/Automatic_Steering_Methods_for_Autonomous_Automobile_Path_Tracking.pdf
7.4 后轮反馈控制
利用后轮反馈转向控制和PID速度控制的路径跟踪模拟。

相关阅读:
城市中的自动驾驶汽车的运动规划和控制技术的调查
https://arxiv.org/abs/1604.07446
7.5 线性二次regulator(LQR)转向控制
使用LQR转向控制和PID速度控制的路径跟踪模拟。

相关阅读:
ApolloAuto/apollo:开源自动驾驶平台
https://github.com/ApolloAuto/apollo
7.6 线性二次regulator(LQR)转向和速度控制
使用LQR转向和速度控制的路径跟踪模拟。

相关阅读:
完全自动驾驶:系统和算法 - IEEE会议出版物
http://ieeexplore.ieee.org/document/5940562/
7.7 模型预测速度和转向控制
最后
Python崛起并且风靡,因为优点多、应用领域广、被大牛们认可。学习 Python 门槛很低,但它的晋级路线很多,通过它你能进入机器学习、数据挖掘、大数据,CS等更加高级的领域。Python可以做网络应用,可以做科学计算,数据分析,可以做网络爬虫,可以做机器学习、自然语言处理、可以写游戏、可以做桌面应用…Python可以做的很多,你需要学好基础,再选择明确的方向。这里给大家分享一份全套的 Python 学习资料,给那些想学习 Python 的小伙伴们一点帮助!
👉Python所有方向的学习路线👈
Python所有方向的技术点做的整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照上面的知识点去找对应的学习资源,保证自己学得较为全面。
👉Python必备开发工具👈
工欲善其事必先利其器。学习Python常用的开发软件都在这里了,给大家节省了很多时间。

👉Python全套学习视频👈
我们在看视频学习的时候,不能光动眼动脑不动手,比较科学的学习方法是在理解之后运用它们,这时候练手项目就很适合了。
👉实战案例👈
学python就与学数学一样,是不能只看书不做题的,直接看步骤和答案会让人误以为自己全都掌握了,但是碰到生题的时候还是会一筹莫展。
因此在学习python的过程中一定要记得多动手写代码,教程只需要看一两遍即可。
👉大厂面试真题👈
我们学习Python必然是为了找到高薪的工作,下面这些面试题是来自阿里、腾讯、字节等一线互联网大厂最新的面试资料,并且有阿里大佬给出了权威的解答,刷完这一套面试资料相信大家都能找到满意的工作。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
看视频学习的时候,不能光动眼动脑不动手,比较科学的学习方法是在理解之后运用它们,这时候练手项目就很适合了。
👉实战案例👈
学python就与学数学一样,是不能只看书不做题的,直接看步骤和答案会让人误以为自己全都掌握了,但是碰到生题的时候还是会一筹莫展。
因此在学习python的过程中一定要记得多动手写代码,教程只需要看一两遍即可。
👉大厂面试真题👈
我们学习Python必然是为了找到高薪的工作,下面这些面试题是来自阿里、腾讯、字节等一线互联网大厂最新的面试资料,并且有阿里大佬给出了权威的解答,刷完这一套面试资料相信大家都能找到满意的工作。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!


























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









