







先自我介绍一下,小编浙江大学毕业,去过华为、字节跳动等大厂,目前阿里P7
深知大多数程序员,想要提升技能,往往是自己摸索成长,但自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!
因此收集整理了一份《2024年最新大数据全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友。
既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上大数据知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
如果你需要这些资料,可以添加V获取:vip204888 (备注大数据)

正文
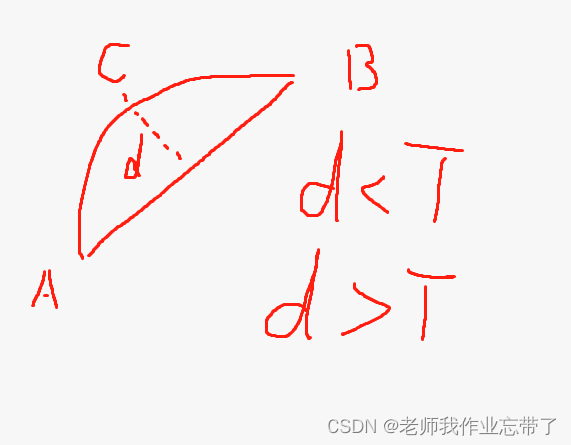
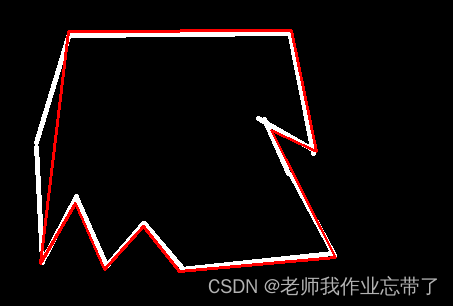
把曲线AB近似成直线AB,至于要d<T(阈值)即可。
我们近似一下下图:
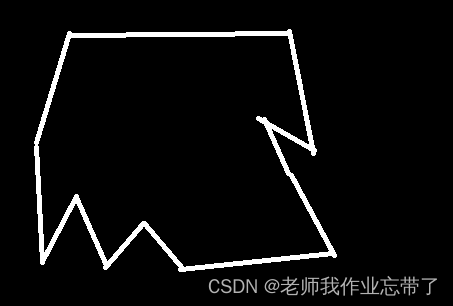
边缘绘制:
img = cv2.imread('contours2.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
cnt = contours[0]
draw_img = img.copy()
res = cv2.drawContours(draw_img, [cnt], -1, (0, 0, 255), 2)
cv_show('res',res)
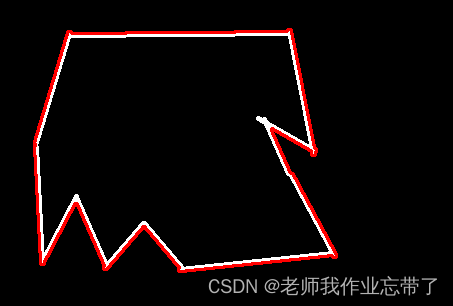
epsilon = 0.02*cv2.arcLength(cnt,True) # 周长百分比 0.02
# 参数:轮廓 阈值,一般用周长百分比
# 返回:轮廓
approx = cv2.approxPolyDP(cnt,epsilon,True)
draw_img = img.copy()
res = cv2.drawContours(draw_img, [approx], -1, (0, 0, 255), 2)
cv_show('res',res)
approx = cv2.approxPolyDP(cnt,epsilon,True)
- 参数:轮廓 阈值,一般用周长百分比
- 返回:轮廓
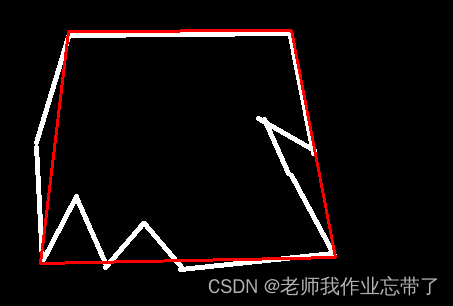
把阈值变大一点:
epsilon = 0.1*cv2.arcLength(cnt,True)
approx = cv2.approxPolyDP(cnt,epsilon,True)
draw_img = img.copy()
res = cv2.drawContours(draw_img, [approx], -1, (0, 0, 255), 2)
cv_show('res',res)
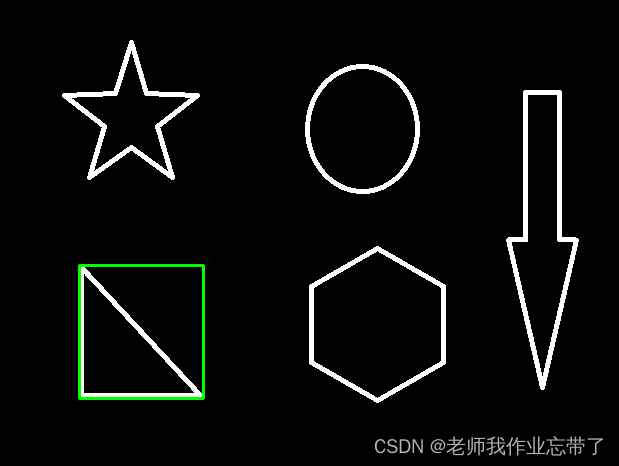
2.5 外接图形
img = cv2.imread('contours.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
# binary,
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
cnt = contours[0]
# 外接矩形 得到x,y,w,h就能把矩形画出来了
x,y,w,h = cv2.boundingRect(cnt)
img = cv2.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2)
cv_show('img',img)
x,y,w,h = cv2.boundingRect(cnt)
三、图像金字塔
3.1 高斯金字塔
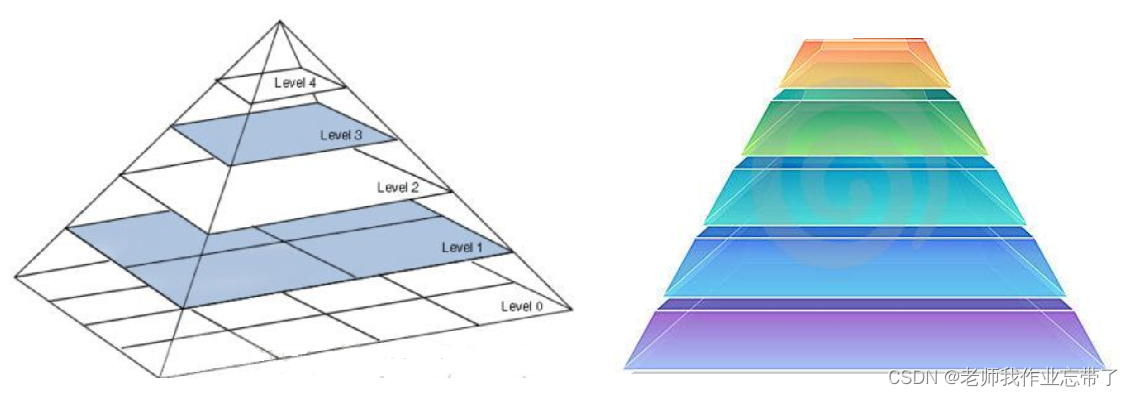
高斯金字塔:向下采样(缩小)
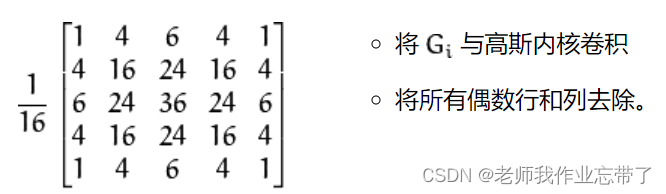
上面金字塔最底层44 往上一层变成22 长宽变为原来一半面积变为原来1/4,去除所有偶数行和列就是为了这一操作。
高斯金字塔:向上采样(扩大)
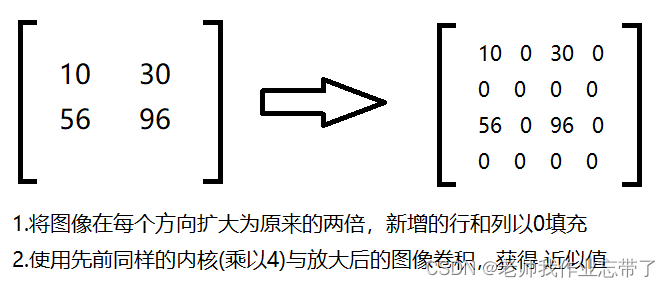
用0填充后,用卷积核把那几个值分布在0上,获得近似值。
img=cv2.imread("./data/gd01.jpg")
cv_show('img',img)
up=cv2.pyrUp(img)
cv_show('up',up)
up2=cv2.pyrUp(up)
cv_show('up2',up2)
down=cv2.pyrDown(img)
cv_show('down',down)
上面其实就是图片的放大与缩小。
下面要注意,缩小放大后的图片会变得模糊,毕竟之前我们是用0填充,卷积核计算获得的近似值。
# 先扩大后缩小后,由于当时是用0填充的,会损失信息。
up=cv2.pyrUp(img)
up_down=cv2.pyrDown(up)
# 显然变得模糊了
cv_show('up_down',np.hstack((img,up_down)))

明显右边模糊了,我们把两张图片做个差值:
# 做差就能看出区别
up=cv2.pyrUp(img)
up_down=cv2.pyrDown(up)
cv_show('img-up_down',img-up_down)
这就是不同的部分。
3.2 拉普拉斯金字塔
和上面最后缩小放大后的图片一样,拉普拉斯这个每一层都是 原始-缩小(放大了的图片) 第二层用第一层的结果去减了。
down=cv2.pyrDown(img)
down_up=cv2.pyrUp(down)
l_1=img-down_up
cv_show('l_1',l_1)

四、直方图
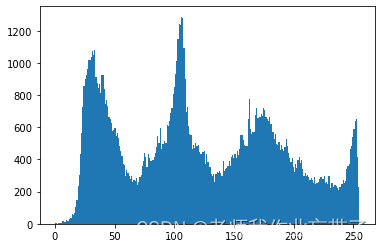
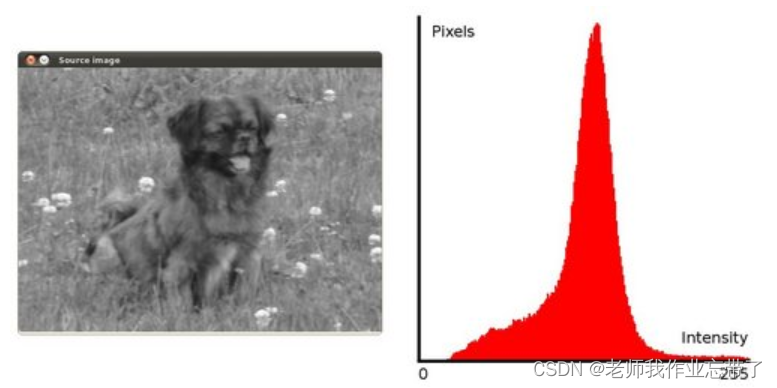
4.1 像素直方图绘制
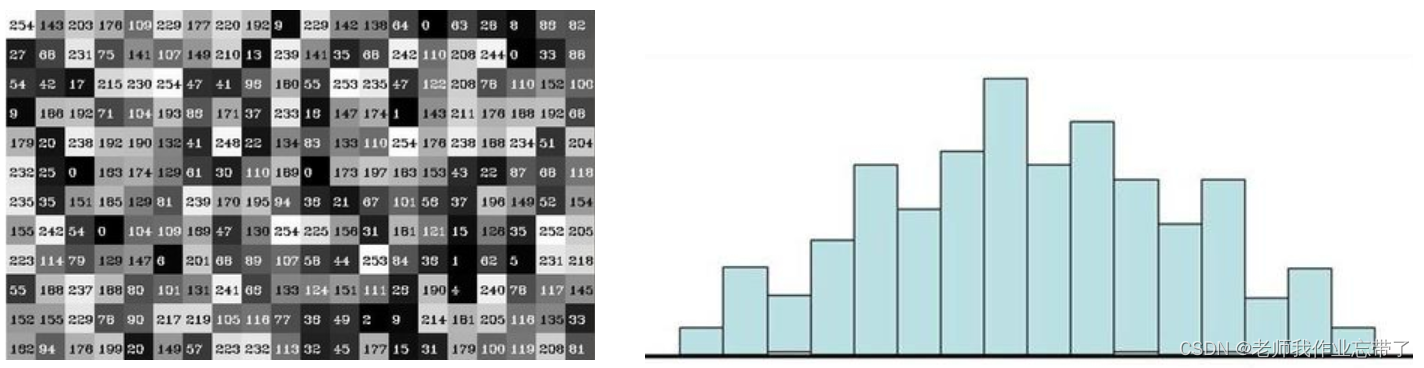
左侧灰度图像素点 右侧像素点直方图
cv2.calcHist(images,channels,mask,histSize,ranges)
- images: 原图像图像格式为 uint8 或 float32。当传入函数时应 用中括号 [] 括来例如[img]
- channels: 同样用中括号括来它会告函数我们统幅图像的直方图。如果入图像是灰度图它的值就是 [0]如果是彩+ 色图像 的传入的参数可以是 [0][1][2] 它们分别对应着 BGR。
- mask: 掩模图像。统计整幅图像的直方图就mask = None。但是如果你想统计图像某一分的直方图的你就制作一个掩模图像并使用它。
- histSize:BIN 的数目。也应用中括号括来如0-10是一个柱子 11-20是一个柱
- ranges: 像素值范围常为 [0256]
img = cv2.imread('./data/gd01.jpg',0) #0表示灰度图
hist = cv2.calcHist([img],[0],None,[256],[0,256])
plt.hist(img.ravel(),256);
plt.show()
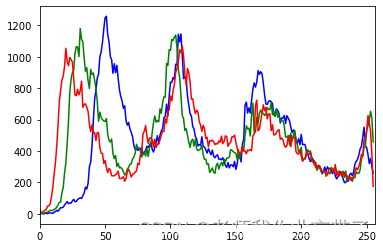
img = cv2.imread('./data/gd01.jpg')
color = ('b','g','r')
for i,col in enumerate(color):
histr = cv2.calcHist([img],[i],None,[256],[0,256])
plt.plot(histr,color = col)
plt.xlim([0,256])
mask操作
我们取一小块区域,然后获得图片中这一块区域的图像
# 创建mast
mask = np.zeros(img.shape[:2], np.uint8)
print (mask.shape)
mask[100:300, 100:400] = 255
cv_show('mask',mask)
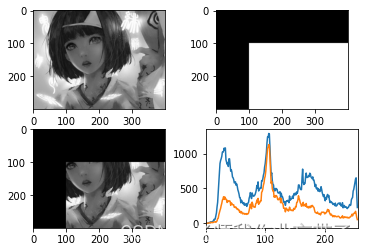
masked_img = cv2.bitwise_and(img, img, mask=mask)#与操作
cv_show('masked_img',masked_img)

hist_full = cv2.calcHist([img], [0], None, [256], [0, 256])
hist_mask = cv2.calcHist([img], [0], mask, [256], [0, 256])
plt.subplot(221), plt.imshow(img, 'gray')
plt.subplot(222), plt.imshow(mask, 'gray')
plt.subplot(223), plt.imshow(masked_img, 'gray')
plt.subplot(224), plt.plot(hist_full), plt.plot(hist_mask)
plt.xlim([0, 256])
plt.show()
4.2 直方图均衡化
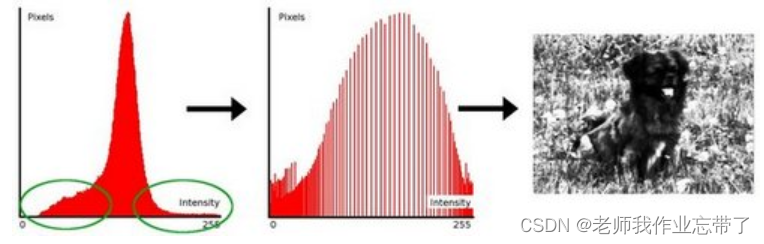
如上图,像素点都集中在一个地方,我们在不破坏其特征的前提下让高瘦的分布变得矮胖一点,亮度什么的也就都会发生些变化。
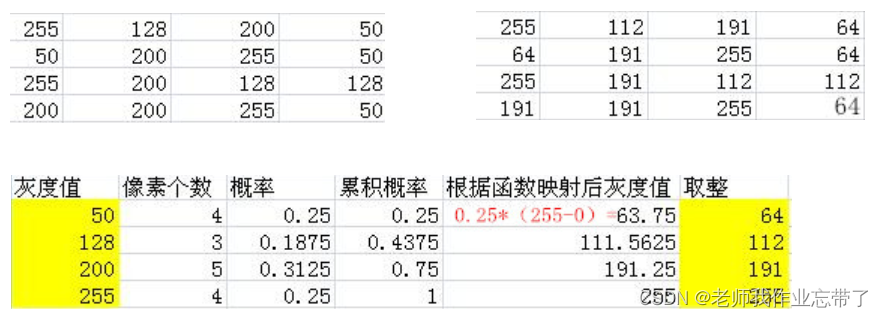
注:这里的映射是 累积概率*取值范围(255-0)
img = cv2.imread('./data/gd01.jpg',0) #0表示灰度图 #clahe
plt.hist(img.ravel(),256);
plt.show()
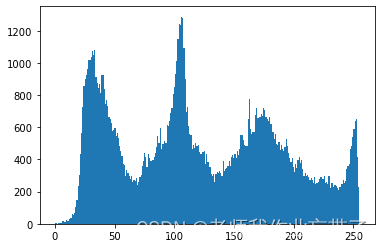
equ = cv2.equalizeHist(img)
plt.hist(equ.ravel(),256)
plt.show()
res = np.hstack((img,equ))
cv_show('res',res)

图片比之前亮一些了。
4.3 自适应直方图均衡化
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8,8))
res_clahe = clahe.apply(img)
res = np.hstack((img,equ,res_clahe))
cv_show('res',res)

五、傅里叶变换
我们生活在时间的世界中,早上7:00起来吃早饭,8:00去挤地铁,9:00开始上班…
以时间为参照就是时域分析,但是在频域中一切都是静止的!
傅里叶变换的作用
- 高频:变化剧烈的灰度分量,例如边界
- 低频:变化缓慢的灰度分量,例如一片大海
滤波
- 低通滤波器:只保留低频,会使得图像模糊
- 高通滤波器:只保留高频,会使得图像细节增强
opencv中主要就是cv2.dft()和cv2.idft(),输入图像需要先转换成np.float32 格式
得到的结果中频率为0的部分会在左上角,通常要转换到中心位置,通过shift变换。
cv2.dft()返回的结果是双通的(实部,虚部),通常还需要转换成图像格式才能展示(0,255)。
import numpy as np
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('./data/gd06.jpg',0)
img_float32 = np.float32(img)
dft = cv2.dft(img_float32, flags = cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)
magnitude_spectrum = 20*np.log(cv2.magnitude(dft_shift[:,:,0],dft_shift[:,:,1]))
plt.subplot(121),plt.imshow(img, cmap = 'gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(magnitude_spectrum, cmap = 'gray')
plt.title('Magnitude Spectrum'), plt.xticks([]), plt.yticks([])
plt.show()

img = cv2.imread('./data/gd06.jpg',0)
img_float32 = np.float32(img)
dft = cv2.dft(img_float32, flags = cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)
rows, cols = img.shape
crow, ccol = int(rows/2) , int(cols/2) # 中心位置
# 低通滤波
mask = np.zeros((rows, cols, 2), np.uint8)
mask[crow-30:crow+30, ccol-30:ccol+30] = 1
# IDFT
fshift = dft_shift*mask
f_ishift = np.fft.ifftshift(fshift)
img_back = cv2.idft(f_ishift)
img_back = cv2.magnitude(img_back[:,:,0],img_back[:,:,1])
plt.subplot(121),plt.imshow(img, cmap = 'gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(img_back, cmap = 'gray')
plt.title('Result'), plt.xticks([]), plt.yticks([])
plt.show()

img = cv2.imread('./data/gd06.jpg',0)
img_float32 = np.float32(img)
dft = cv2.dft(img_float32, flags = cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)
rows, cols = img.shape
crow, ccol = int(rows/2) , int(cols/2) # 中心位置
# 高通滤波
mask = np.ones((rows, cols, 2), np.uint8)
mask[crow-30:crow+30, ccol-30:ccol+30] = 0
# IDFT
fshift = dft_shift*mask
f_ishift = np.fft.ifftshift(fshift)
img_back = cv2.idft(f_ishift)
img_back = cv2.magnitude(img_back[:,:,0],img_back[:,:,1])
plt.subplot(121),plt.imshow(img, cmap = 'gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(img_back, cmap = 'gray')
plt.title('Result'), plt.xticks([]), plt.yticks([])
plt.show()

六、模板匹配
模板匹配和卷积原理很像,模板在原图像上从原点开始滑动,计算模板与(图像被模板覆盖的地方)的差别程度,这个差别程度的计算方法在opencv里有6种,然后将每次计算的结果放入一个矩阵里,作为结果输出。
假如原图形是AxB大小,而模板是axb大小,则输出结果的矩阵是(A-a+1)x(B-b+1)
img = cv2.imread('./data/gd04.jpg', 0)
template = cv2.imread('./data/gd_face.jpg', 0)
h, w = template.shape[:2]
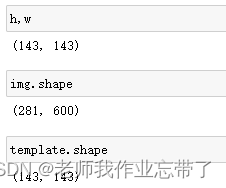
它们的关系就是(A-a+1)x(B-b+1)
res = cv2.matchTemplate(img, template, cv2.TM_SQDIFF)
- TM_SQDIFF:计算平方不同,计算出来的值越小,越相关
- TM_CCORR:计算相关性,计算出来的值越大,越相关
- TM_CCOEFF:计算相关系数,计算出来的值越大,越相关
- TM_SQDIFF_NORMED:计算归一化平方不同,计算出来的值越接近0,越相关
- TM_CCORR_NORMED:计算归一化相关性,计算出来的值越接近1,越相关
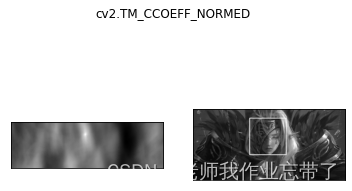
- TM_CCOEFF_NORMED:计算归一化相关系数,计算出来的值越接近1,越相关
methods = ['cv2.TM_CCOEFF', 'cv2.TM_CCOEFF_NORMED', 'cv2.TM_CCORR',
'cv2.TM_CCORR_NORMED', 'cv2.TM_SQDIFF', 'cv2.TM_SQDIFF_NORMED']
res = cv2.matchTemplate(img, template, cv2.TM_SQDIFF)
# res.shape 为(139, 458)
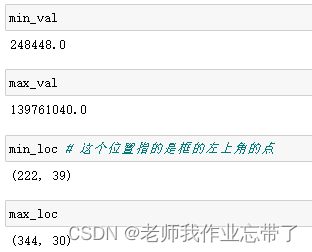
# 最小值最大值及其坐标位置 因为用的cv2.TM_SQDIFF 所以越小越好
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)
比如我要用到的图像和脸:


for meth in methods:
img2 = img.copy()
# 匹配方法的真值
method = eval(meth)
print (method)
res = cv2.matchTemplate(img, template, method)
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)
# 如果是平方差匹配TM_SQDIFF或归一化平方差匹配TM_SQDIFF_NORMED,取最小值
if method in [cv2.TM_SQDIFF, cv2.TM_SQDIFF_NORMED]:
top_left = min_loc
else:
top_left = max_loc
bottom_right = (top_left[0] + w, top_left[1] + h)
# 画矩形
cv2.rectangle(img2, top_left, bottom_right, 255, 2)
plt.subplot(121), plt.imshow(res, cmap='gray')
plt.xticks([]), plt.yticks([]) # 隐藏坐标轴
plt.subplot(122), plt.imshow(img2, cmap='gray')
plt.xticks([]), plt.yticks([])
plt.suptitle(meth)
plt.show()

网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
需要这份系统化的资料的朋友,可以添加V获取:vip204888 (备注大数据)

一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
plt.xticks([]), plt.yticks([]) # 隐藏坐标轴
plt.subplot(122), plt.imshow(img2, cmap='gray')
plt.xticks([]), plt.yticks([])
plt.suptitle(meth)
plt.show()


**网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。**
**需要这份系统化的资料的朋友,可以添加V获取:vip204888 (备注大数据)**
[外链图片转存中...(img-TJVQTixs-1713314217328)]
**一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!**
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









