







如何自学黑客&网络安全
黑客零基础入门学习路线&规划
初级黑客
1、网络安全理论知识(2天)
①了解行业相关背景,前景,确定发展方向。
②学习网络安全相关法律法规。
③网络安全运营的概念。
④等保简介、等保规定、流程和规范。(非常重要)
2、渗透测试基础(一周)
①渗透测试的流程、分类、标准
②信息收集技术:主动/被动信息搜集、Nmap工具、Google Hacking
③漏洞扫描、漏洞利用、原理,利用方法、工具(MSF)、绕过IDS和反病毒侦察
④主机攻防演练:MS17-010、MS08-067、MS10-046、MS12-20等
3、操作系统基础(一周)
①Windows系统常见功能和命令
②Kali Linux系统常见功能和命令
③操作系统安全(系统入侵排查/系统加固基础)
4、计算机网络基础(一周)
①计算机网络基础、协议和架构
②网络通信原理、OSI模型、数据转发流程
③常见协议解析(HTTP、TCP/IP、ARP等)
④网络攻击技术与网络安全防御技术
⑤Web漏洞原理与防御:主动/被动攻击、DDOS攻击、CVE漏洞复现
5、数据库基础操作(2天)
①数据库基础
②SQL语言基础
③数据库安全加固
6、Web渗透(1周)
①HTML、CSS和JavaScript简介
②OWASP Top10
③Web漏洞扫描工具
④Web渗透工具:Nmap、BurpSuite、SQLMap、其他(菜刀、漏扫等)
恭喜你,如果学到这里,你基本可以从事一份网络安全相关的工作,比如渗透测试、Web 渗透、安全服务、安全分析等岗位;如果等保模块学的好,还可以从事等保工程师。薪资区间6k-15k
到此为止,大概1个月的时间。你已经成为了一名“脚本小子”。那么你还想往下探索吗?
如果你想要入坑黑客&网络安全,笔者给大家准备了一份:282G全网最全的网络安全资料包评论区留言即可领取!
7、脚本编程(初级/中级/高级)
在网络安全领域。是否具备编程能力是“脚本小子”和真正黑客的本质区别。在实际的渗透测试过程中,面对复杂多变的网络环境,当常用工具不能满足实际需求的时候,往往需要对现有工具进行扩展,或者编写符合我们要求的工具、自动化脚本,这个时候就需要具备一定的编程能力。在分秒必争的CTF竞赛中,想要高效地使用自制的脚本工具来实现各种目的,更是需要拥有编程能力.
如果你零基础入门,笔者建议选择脚本语言Python/PHP/Go/Java中的一种,对常用库进行编程学习;搭建开发环境和选择IDE,PHP环境推荐Wamp和XAMPP, IDE强烈推荐Sublime;·Python编程学习,学习内容包含:语法、正则、文件、 网络、多线程等常用库,推荐《Python核心编程》,不要看完;·用Python编写漏洞的exp,然后写一个简单的网络爬虫;·PHP基本语法学习并书写一个简单的博客系统;熟悉MVC架构,并试着学习一个PHP框架或者Python框架 (可选);·了解Bootstrap的布局或者CSS。
8、超级黑客
这部分内容对零基础的同学来说还比较遥远,就不展开细说了,附上学习路线。
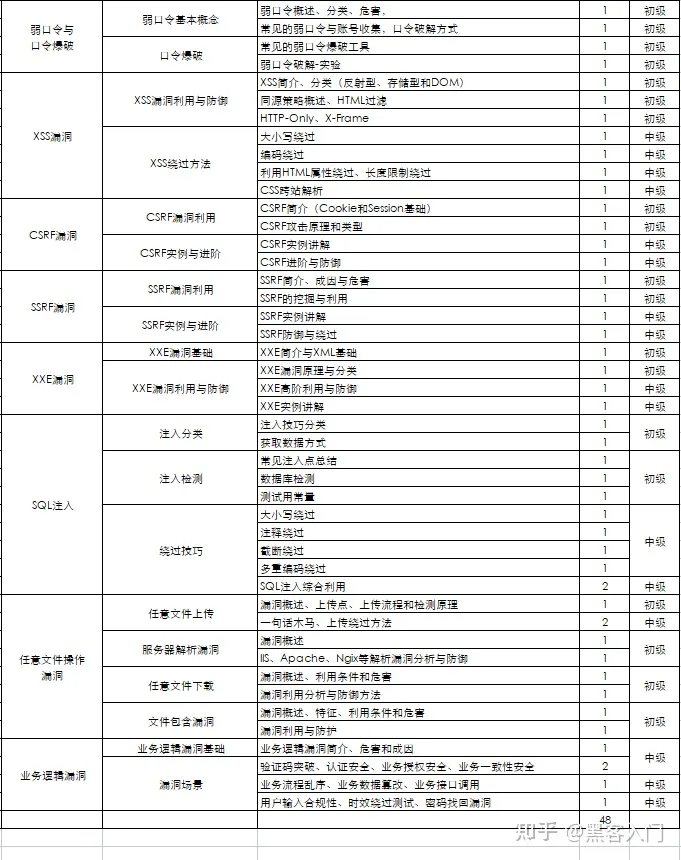
网络安全工程师企业级学习路线

如图片过大被平台压缩导致看不清的话,评论区点赞和评论区留言获取吧。我都会回复的
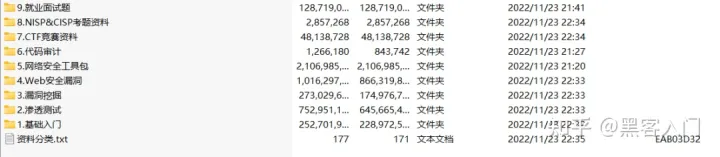
视频配套资料&国内外网安书籍、文档&工具
当然除了有配套的视频,同时也为大家整理了各种文档和书籍资料&工具,并且已经帮大家分好类了。
一些笔者自己买的、其他平台白嫖不到的视频教程。

网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
- 服务器
本实验中无需编程,为turtlesim::Spawn定义的/spwan服务
- 客户端
class ClientNode(Node):
def \_\_init\_\_(self, name):
super().__init__(name)
self.client = self.create_client(Spawn, '/spawn')
while not self.client.wait_for_service(timeout_sec=1.0):
self.get_logger().info('service not available, waiting again...')
self.request = Spawn.Request()
def sendRequest(self):
self.request.name = "winter\_turtle"
self.request.x = 1.0
self.request.y = 1.0
self.request.theta = 1.57
self.future = self.client.call_async(self.request)
服务通信的效果如下所示:

4 自定义服务
自定义服务的通用流程如下:
- 功能包下新建
srv文件夹,在其中添加自定义服务xxx.srv,注意请求和响应数据结构使用---分割- 功能包
package.xml中添加编译依赖与执行依赖<buildtool\_depend>rosidl_default_generators</buildtool\_depend> <exec\_depend>rosidl_default_runtime</exec\_depend> <member\_of\_group>rosidl_interface_packages</member\_of\_group>
- 功能包
CMakeLists.txt中添加编译消息相关依赖find_package(rosidl_default_generators REQUIRED) rosidl_generate_interfaces(${PROJECT_NAME} "xxx.srv" DEPENDENCIES xxx_srvs ) ament_export_dependencies(rosidl_default_runtime)
- 编译自定义消息,在
install/<pkg_name>/include中生成由xxx.srv编译的C++可识别的xxx.hpp头文件- 引入
xxx.hpp即可调用自定义服务
下面给出一个实例
添加如下自定义服务实现一个加法服务,并按上面步骤配置依赖
# client
int32 a
int32 b
---
# server
int32 sum
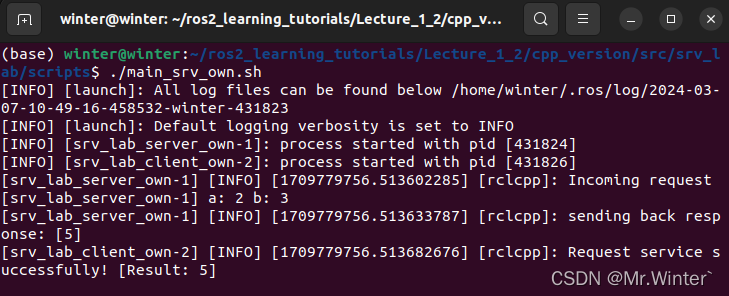
定义一个服务器、一个客户端,限于篇幅只贴出部分代码,完整代码见文末。
- 服务器
class ServerNode : public rclcpp::Node
{
public:
ServerNode() : Node("lab\_srv\_server\_own") {
server_ = create\_service<own\_srv\_lab::srv::Add>(
"/add\_service",
std::bind(&ServerNode::OnAddSrvCallBack, this, std::placeholders::_1, std::placeholders::_2)
);
}
private:
rclcpp::Service<own_srv_lab::srv::Add>::SharedPtr server_;
void OnAddSrvCallBack(
const std::shared_ptr<own_srv_lab::srv::Add::Request> request,
std::shared_ptr<own_srv_lab::srv::Add::Response> response
) {
response->sum = request->a + request->b;
RCLCPP\_INFO(rclcpp::get\_logger("rclcpp"), "Incoming request\na: %d" " b: %d", request->a, request->b);
RCLCPP\_INFO(rclcpp::get\_logger("rclcpp"), "sending back response: [%d]", response->sum);
}
};
- 客户端
ClientNode() : Node("lab\_srv\_client\_own") {
client_ = create\_client<own\_srv\_lab::srv::Add>("/add\_service");
}
void request(int a, int b) {
auto add_srv = std::make\_shared<own\_srv\_lab::srv::Add::Request>();
add_srv->a = a;
add_srv->b = b;
while (!client_->wait\_for\_service(std::chrono::seconds(1))) {
if (!rclcpp::ok()) {
RCLCPP\_ERROR(rclcpp::get\_logger("rclcpp"), "Interrupted while waiting for the service. Exiting.");
return;
}
RCLCPP\_INFO(rclcpp::get\_logger("rclcpp"), "service not available, waiting again...");
}
auto result = client_->async\_send\_request(add_srv, std::bind(&ClientNode::OnResultCallBack, this, std::placeholders::_1));
}
服务通信效果如下所示:
5 话题、服务通信的异同
| 对比 | 话题 | 服务 |
|---|---|---|
| 通信模式 | 发布-订阅 | 请求-响应 |
| 同步性 | 异步 | 同步 |
| 缓冲区 | 有 | 无 |
| 实时性 | 弱 | 强 |
| 节点关系 | 多对多 | 一对多(1个server对应一个服务) |
| 通信格式 | .msg | .srv |
| 使用场景 | 连续高频的数据传输,例如激光雷达、里程计传输数据 | 偶尔调用的功能,例如图像识别 |
完整代码通过下方博主名片联系获取
🔥 更多精彩专栏:
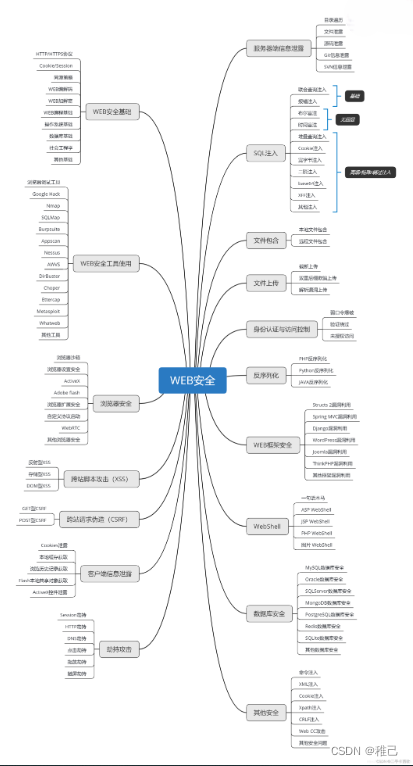
学习路线:
这个方向初期比较容易入门一些,掌握一些基本技术,拿起各种现成的工具就可以开黑了。不过,要想从脚本小子变成黑客大神,这个方向越往后,需要学习和掌握的东西就会越来越多以下是网络渗透需要学习的内容:
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!















 628
628

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









