







既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上C C++开发知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
视觉化工具函数库(VTK,Visualization Toolkit)是一个开源、跨平台的系统,主要用于三维计算机图形学、图像处理和可视化等。
1. 先安装cmake 和vtk 的依赖项
sudo apt-get install cmake-curses-gui
sudo apt-get install freeglut3-dev
2.下载VTK-8.2.0库
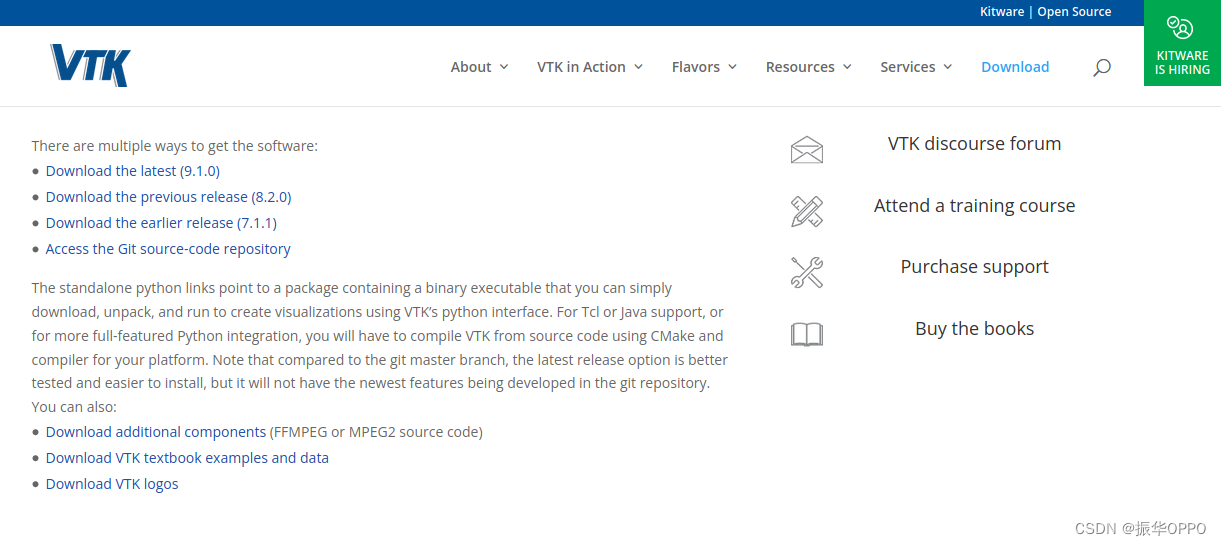
点击Download the previous release (8.2.0),然后选择下载下面任意一种类型的压缩包。因为zip和tar.gz都可以在ubuntu中手动解压。

3.解压VTK-8.2.0
进入压缩包的下载目录,然后右击【提取到此处】,当然也可以命令行解压,这里怎么简单怎么来。然后打开终端,进入VTK-8.2.0文件夹。

创建build文件夹,然后cd到build中, 使用可视化的cmake进行工程分析
mkdir build
cd build
cmake-gui
4.配置VTK-8.2.0
选择文件路径,并勾选Grouped和Advanced, 如果看不到红色部分的内容,可以先点击底下的configure按钮,就可以出现红色部分的内容。

展开Module和VTK,然后分别在里面配置勾选这两个:Module_vtkGUISupportQt、VTK_Group_Qt
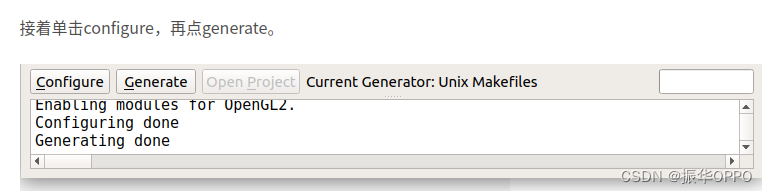
如果一切正常,可以发现红色部分全都变为了白色,若发现有部分红色内容,则将文件夹build中内容删除后,重新点击configure就ok了。这里其实就相当于进行了cmake分析。
5.编译安装VTK-8.2.0
Ctrl+Z或者手动关闭cmake-gui界面。然后输入sudo make进行编译,过程会比较漫长。
 最后输入
最后输入sudo make install进行安装,大概5s不到,至此VTK-8.2.0安装成功。
4、安装pcl
1、下载pcl 1.9.1
首先进入pcl的下载官网,没错,它官网没有源代码,都在github: https://github.com/PointCloudLibrary/pcl.git
然后点击右侧中间的Release,进入历史版本界面:
我只能说官方是不是不想让我们下载历史版本呢,找到了1.91,然后源代码在哪里呢?
蓦然回首,原来它在下面的Assets目录下,就是Source code,这里依然自由选择压缩包格式。
2、编译安装pcl 1.9.1
解压下载的压缩包,然后打开终端,进入解压的目录,输入下面命令:
cd pcl-pcl-1.9.1
mkdir release
cd release
就像这样:

然后复制下面命令回车,用cmake分析整个源代码
cmake -DCMAKE\_BUILD\_TYPE=None -DCMAKE\_INSTALL\_PREFIX=/usr \ -DBUILD\_GPU=ON-DBUILD_apps=ON -DBUILD\_examples=ON \ -DCMAKE\_INSTALL\_PREFIX=/usr ..
如果cmake过程中出现下面这些找不到包的Warning,不要担心,博主查了很多资料都说可以忽略。只要没报错,显示Generating 100%就行。
Could NOT find FZAPI (missing: FZAPI_LIBS FZAPI_INCLUDE_DIRS)
– Fotonic camera support: not building because FZAPI not found
– Could NOT find ENSENSO (missing: ENSENSO_LIBRARIES ENSENSO_INCLUDE_DIRS)
– IDS-Imaging Ensenso camera support: not building because Ensenso not found
– Could NOT find davidSDK (missing: DAVIDSDK_LIBRARY DAVIDSDK_INCLUDE_DIR)
– David Vision Systems SDK support: not building because davidSDK not found
– Could NOT find DSSDK (missing: DSSDK_LIBRARIES DSSDK_INCLUDE_DIRS)
– DepthSense SDK support: not building because DSSDK not found
– Could NOT find RSSDK (missing: RSSDK_LIBRARIES RSSDK_INCLUDE_DIRS)
– RealSense SDK support: not building because RSSDK not found
接着输入make进行编译,过程也比较漫长,可以做其他事情。

最后输入sudo make install 进行安装,安装过程非常快!

5、测试pcl
1、创建一个test_pcl文件夹,然后创建一个源文件test_pcl.cpp,代码如下:
#include <iostream>
#include <pcl/common/common\_headers.h>
#include <pcl/io/pcd\_io.h>
#include <pcl/visualization/pcl\_visualizer.h>
#include <pcl/visualization/cloud\_viewer.h>
#include <pcl/console/parse.h>
using namespace std;
int main(int argc, char \*\*argv) {//柱型点云测试
cout << "Test PCL !" << endl;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr point\_cloud\_ptr (new pcl::PointCloud<pcl::PointXYZRGB>);
uint8\_t r(255), g(15), b(15);
for (float z(-1.0); z <= 1.0; z += 0.05) {//制作柱型点云集
for (float angle(0.0); angle <= 360.0; angle += 5.0) {
pcl::PointXYZRGB point;
point.x = cos (pcl::deg2rad(angle));
point.y = sin (pcl::deg2rad(angle));
point.z = z;
uint32\_t rgb = (static\_cast<uint32\_t>(r) << 16 | static\_cast<uint32\_t>(g) << 8 | static\_cast<uint32\_t>(b));
point.rgb = \*reinterpret\_cast<float\*>(&rgb);
point_cloud_ptr->points.push\_back (point);
}
if (z < 0.0) {//颜色渐变
r -= 12;
g += 12;
}
else {
g -= 12;
b += 12;
}
}
point_cloud_ptr->width = (int) point_cloud_ptr->points.size ();
point_cloud_ptr->height = 1;
pcl::visualization::CloudViewer viewer ("pcl—test测试");
viewer.showCloud(point_cloud_ptr);
while (!viewer.wasStopped()){ };
return 0;
}
2、在test_pcl文件夹下再创建一个配置文件CMakeLists.txt,代码如下:

网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。**
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









