







收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
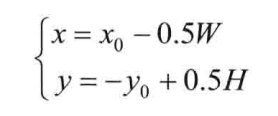
图像坐标系与数学坐标系是不相同,所以在旋转过程中需要进行两次坐标变换。
1)旋转操作前
将图像坐标系转到数学坐标系,公式中,W和H为原始图像的宽高。
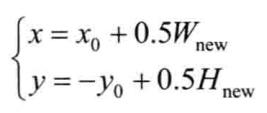
2)旋转操作后
将旋转后图像的数学坐标系转到图像坐标系(相当于转回来),公式中,Wnew和Hnew分别表示输出图像的宽高。
3.旋转公式
有了前面的铺垫,我们知道图像的旋转要经过如下三步才能完成:
1.输入图像的坐标系转数学坐标系
2.通过旋转关系计算出旋转后的坐标
3.旋转坐标系(数学坐标系)转图像坐标系
总的公式可见下面(输出坐标映射到原坐标):

2.代码实现(代码是我以前自学图像处理时写的,代码很粗糙没做任何优化,但很好理解)
/*图像的旋转函数(最临近插值法) angle为旋转度数,以弧度表示*/
QImage* MainWindow::RotateNormal(QImage* image,double angle)
{
int srcX1, srcX2, srcX3, srcX4;
int srcY1, srcY2, srcY3, srcY4;
srcX1 = 0;
srcY1 = 0;
srcX2 = image->width() - 1;
srcY2 = 0;
srcX3 = 0;
srcY3 = image->height() - 1;
srcX4 = image->width() - 1;
srcY4 = image->height() - 1;
double fSin = sin(angle);
double fCos = cos(angle);
double tranX1, tranX2, tranX3, tranX4;
double tranY1, tranY2, tranY3, tranY4;
tranX1 = fCos * srcX1 + fSin * srcY1;
tranY1 = -fSin * srcX1 + fCos * srcY1;
tranX2 = fCos * srcX2 + fSin * srcY2;
tranY2 = -fSin * srcX2 + fCos * srcY2;
tranX3 = fCos * srcX3 + fSin * srcY3;
tranY3 = -fSin * srcX3 + fCos * srcY3;
tranX4 = fCos * srcX4 + fSin * srcY4;
tranY4 = -fSin * srcX4 + fCos * srcY4;
unsigned int outWidth = (unsigned int)(max(fabs(tranX4 - tranX1), fabs(tranX3 - tranX2)) + 1.5);
unsigned int outHeight = (unsigned int)(max(fabs(tranY4 - tranY1), fabs(tranY3 - tranY2)) + 1.5);
QImage* newImage = new QImage(outWidth,outHeight,QImage::Format_ARGB32);
double num1 = -0.5 * outWidth * fCos - 0.5 * outHeight * fSin + 0.5 * image->width();
double num2 = 0.5 * outWidth * fSin - 0.5 * outHeight * fCos + 0.5 * image->height();
unsigned char* copyPixel = NULL;
unsigned char* objPixel = NULL;
int x = 0;
int y = 0;
for(long j = 0; j < (long)outHeight; j++)
{
for(long i = 0; i <(long)outWidth; i++)
{
x = (int)(i * fCos + j * fSin + num1 + 0.5);
y = (int)(-i * fSin + j * fCos + num2 + 0.5);
if(x == image->width())
{
x--;
}
if(y == image->height())
{
y--;
}
copyPixel = image->bits() + y * image->width() * 4 + x * 4;
objPixel = newImage->bits() + j * outWidth * 4 + i * 4;
if(x >= 0 && x < image->width() && y >=0 && y < image->height())
{
memcpy(objPixel, copyPixel, 4);
}
}
}
return newImage;
}
/*图像的旋转函数(双线性插值法) angle为旋转度数,以弧度表示*/
QImage* MainWindow::RotateInterpolation(QImage* image,double angle)
{
int srcX1, srcX2, srcX3, srcX4;
int srcY1, srcY2, srcY3, srcY4;
srcX1 = 0;
srcY1 = 0;
srcX2 = image->width() - 1;
srcY2 = 0;
srcX3 = 0;
srcY3 = image->height() - 1;
srcX4 = image->width() - 1;
srcY4 = image->height() - 1;
double fSin = sin(angle);
double fCos = cos(angle);
double tranX1, tranX2, tranX3, tranX4;
double tranY1, tranY2, tranY3, tranY4;
tranX1 = fCos * srcX1 + fSin * srcY1;
tranY1 = -fSin * srcX1 + fCos * srcY1;
tranX2 = fCos * srcX2 + fSin * srcY2;
tranY2 = -fSin * srcX2 + fCos * srcY2;
tranX3 = fCos * srcX3 + fSin * srcY3;
tranY3 = -fSin * srcX3 + fCos * srcY3;
tranX4 = fCos * srcX4 + fSin * srcY4;
tranY4 = -fSin * srcX4 + fCos * srcY4;
long outWidth = (unsigned int)(max(fabs(tranX4 - tranX1), fabs(tranX3 - tranX2)) + 1.5);
long outHeight = (unsigned int)(max(fabs(tranY4 - tranY1), fabs(tranY3 - tranY2)) + 1.5);
QImage* newImage = new QImage(outWidth,outHeight,QImage::Format_ARGB32);
double num1 = -0.5 * outWidth * fCos - 0.5 * outHeight * fSin + 0.5 * image->width();
double num2 = 0.5 * outWidth * fSin - 0.5 * outHeight * fCos + 0.5 * image->height();
double x = 0.0;
double y = 0.0;
int r,g,b;
for (long j = 0; j < outHeight; j++)
{
for(long i =0; i < outWidth; i++)
{
x = (i * fCos + j * fSin + num1 + 0.5);
y = (-i * fSin + j * fCos + num2 + 0.5);


**既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上物联网嵌入式知识点,真正体系化!**
**由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、电子书籍、讲解视频,并且后续会持续更新**
**[如果你需要这些资料,可以戳这里获取](https://bbs.csdn.net/topics/618679757)**
上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上物联网嵌入式知识点,真正体系化!**
**由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、电子书籍、讲解视频,并且后续会持续更新**
**[如果你需要这些资料,可以戳这里获取](https://bbs.csdn.net/topics/618679757)**















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









