









本文专为IT技术员、软件开发工程师及智能停车领域专业人士打造,旨在剖析蓝牙Beacon技术在停车场定位导航系统中的实际应用与优势,如需获取详细解决方案可前往文章最下方获取,如有项目需求及技术合作可私信作者。
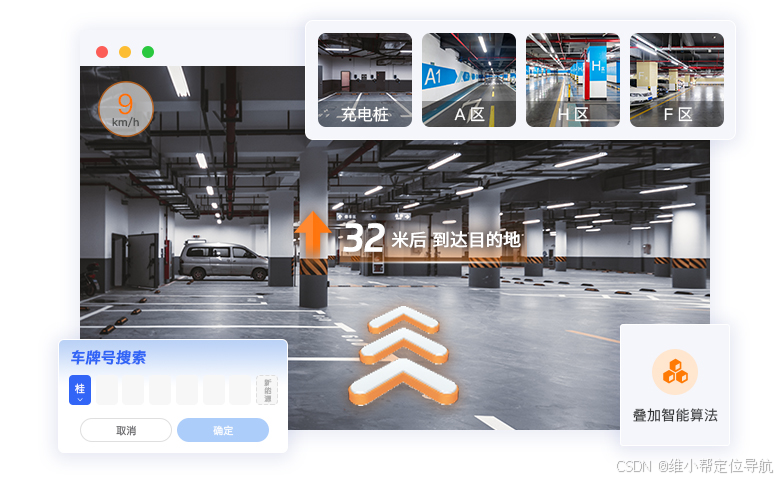
你是否还在寻找一种高效、低功耗且易于部署的室内定位解决方案,以优化停车场管理并提升用户体验?本文将为您介绍如何利用蓝牙Beacon技术,构建一套高精度、智能化的停车场定位导航系统。该系统能够迅速定位空闲车位,提供反向寻车功能,并优化停车场管理流程,有效解决大型停车场中的找车位难题。
一、蓝牙Beacon技术工作原理
蓝牙Beacon是一种小型、低功耗的无线设备,通过广播蓝牙信号与移动设备建立连接。其工作原理基于蓝牙4.0及以上版本的低功耗广播技术(BLE),移动设备接收到Beacon发出的信号后,根据信号强度(RSSI)估算距离,从而实现定位。

关键技术指标包括RSSI值、广播频率和电池寿命,它们共同决定了定位系统的精度和稳定性。RSSI值反映了信号强度,是定位算法的核心输入;广播频率决定了设备被发现的频率;而电池寿命则决定了Beacon的维护成本和使用寿命。
二、停车场定位导航系统设计与实现
需求分析阶段,我们明确了系统的核心需求:快速定位空闲车位、提供反向寻车路径、优化停车场路径规划。基于这些需求,我们设计了以下系统架构:
1、停车场定位导航硬件部署
- Beacon设备部署于停车场各个角落和车位附近,形成密集的信号覆盖网络。
- 部署策略考虑到了信号干扰和覆盖盲区,确保每个车位都能被准确识别。

2、停车场定位导航软件平台
- 服务器端负责数据处理和地图渲染,采用高性能服务器集群,确保实时性和稳定性。
- 客户端为微信小程序,提供用户交互界面和定位导航功能。
- 通过RSSI值进行定位计算,以及利用卡尔曼滤波算法来平滑RSSI信号,从而提高定位精度。
RSSI值定位计算:
RSSI值(Received Signal Strength Indication)是蓝牙Beacon信号强度的一个度量,它与距离的关系通常表示为路径损耗模型。一个简单的路径损耗模型可以表示为:
RSSI=A−10nlog10(d)
其中,A是距离1米处的信号强度,n是路径损耗指数(与环境有关),d是设备间的距离。通过测量RSSI值,我们可以反推出设备间的距离。
然而,由于多径效应、障碍物遮挡等因素,RSSI值往往波动较大,因此我们需要进行信号平滑处理。
卡尔曼滤波算法:
卡尔曼滤波是一种高效的递归滤波器,它能够在存在噪声的情况下,从一系列不完全或包含噪声的测量数据中估计动态系统的状态。在蓝牙Beacon定位系统中,我们可以利用卡尔曼滤波来平滑RSSI信号,从而提高定位精度。
以下是卡尔曼滤波算法在RSSI信号平滑处理中的一个简化实现示例:
// 卡尔曼滤波类
public class KalmanFilter {
private double q; // 过程噪声协方差
private double r; // 测量噪声协方差
private double x; // 状态估计值
private double p; // 估计误差协方差
private double k; // 卡尔曼增益
public KalmanFilter(double q, double r, double initialEstimate) {
this.q = q;
this.r = r;
this.x = initialEstimate;
this.p = 1.0; // 初始估计误差协方差可以设为1或其他值
}
// 更新函数,用于根据新的测量值更新状态估计
public double update(double measurement) {
// 预测步骤
double p_predict = p + q;
// 更新步骤
k = p_predict / (p_predict + r);
x = x + k * (measurement - x);
p = (1 - k) * p_predict;
return x;
}
}
// 示例代码:使用卡尔曼滤波平滑RSSI信号
public class RSSISmoothing {
public static void main(String[] args) {
// 假设我们有一系列的RSSI测量值
double[] rssiMeasurements = { -50, -48, -52, -49, -51, -53, -50, -47 };
KalmanFilter kalmanFilter = new KalmanFilter(0.1, 0.5, rssiMeasurements[0]);
// 对每个RSSI测量值应用卡尔曼滤波
for (double rssi : rssiMeasurements) {
double smoothedRSSI = kalmanFilter.update(rssi);
System.out.println("Measured RSSI: " + rssi + ", Smoothed RSSI: " + smoothedRSSI);
}
}
}在上面的代码中,KalmanFilter类实现了卡尔曼滤波算法的核心逻辑。update方法用于根据新的测量值更新状态估计。在RSSISmoothing类的main方法中,我们模拟了一系列RSSI测量值,并对每个测量值应用了卡尔曼滤波,从而得到了平滑后的RSSI信号。
定位算法
在得到平滑后的RSSI信号后,我们可以利用三角定位法或指纹定位法等算法来确定设备的位置。三角定位法通过测量设备到多个Beacon的距离,然后利用几何关系计算出设备的位置。指纹定位法则是在离线阶段收集不同位置的RSSI指纹信息,然后在在线阶段通过匹配指纹来确定设备的位置。
由于定位算法的实现相对复杂,并且依赖于具体的应用场景和环境,因此在这里我们不再深入展开。但值得注意的是,选择合适的定位算法对于提高定位精度和稳定性至关重要。
三、应用了蓝牙beacon技术的停车场定位导航系统优势
- 高精度定位:采用先进的定位算法和信号处理技术,实现厘米级定位精度。
- 低功耗设计:通过动态调整广播频率和智能休眠策略,确保Beacon设备长时间稳定运行。
- 易于部署与扩展:灵活的API接口和模块化设计,支持与其他智能停车管理系统无缝集成。
四、性能优化与扩展性考虑
功耗管理方面,我们采用了动态调整广播频率和智能休眠策略,确保Beacon设备在低功耗模式下运行。数据安全与隐私保护方面,我们采用了数据加密和匿名化处理措施,确保用户数据的安全性和隐私性。
系统扩展性方面,我们设计了灵活的API接口,支持与其他智能停车管理系统集成,如车牌识别系统、支付系统等。未来,我们还将探索UWB、5G等新技术在停车场定位导航系统中的应用。
通过本文的介绍,我们展示了蓝牙Beacon技术在停车场定位导航系统中的应用潜力和价值。我们的系统不仅具备高精度、低功耗和易于部署的优势,还通过不断优化和扩展,为停车场智能化管理提供了有力支持。未来,我们将继续探索新技术和新应用,为停车场管理带来更多创新和变革。
如需了解详细停车场定位系统方案可点击文章最下方。


















 817
817

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









