






双边滤波的基本思路是同时考虑将要被滤波的像素点的空域信息(周围像素点的位置的权重)和值域信息(周围像素点的像素值的权重)。为什么要添加值域信息呢?是因为假设图像在空间中是缓慢变化的话,那么临近的像素点会更相近,但是这个假设在图像的边缘处会不成立,因为图像的边缘处的像素点必不会相近。因此在边缘处如果只是使用空域信息来进行滤波的话,得到的结果必然是边缘被模糊了,这样我们就丢掉了边缘信息,因此添加了值域信息。
双边滤波采用了两个高斯滤波的结合,一个负责计算空间邻近度的权值(也就是空域信息),也就是上面的高斯滤波器,另一个负责计算像素值相似度的权值(也就是值域信息),也是一个高斯滤波器。其公式如下所示:
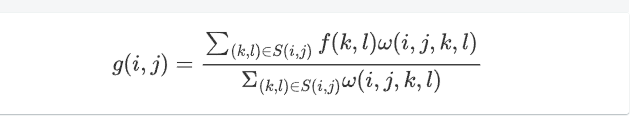
其中,
S(i,j):指以(i,j)为中心的邻域的范围
f(k,l):输入的点的像素值
\omega(i,j,k,l):代表经过两个高斯函数计算出的值
g(i,j):表示中心点(i,j)的像素值
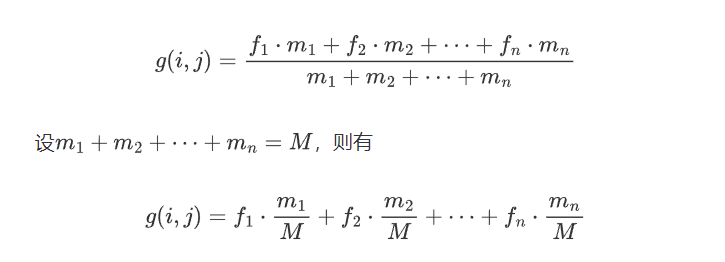
上述公式我们进行转化,假设公式中\omega(i,j,k,l)为m,则有


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









