






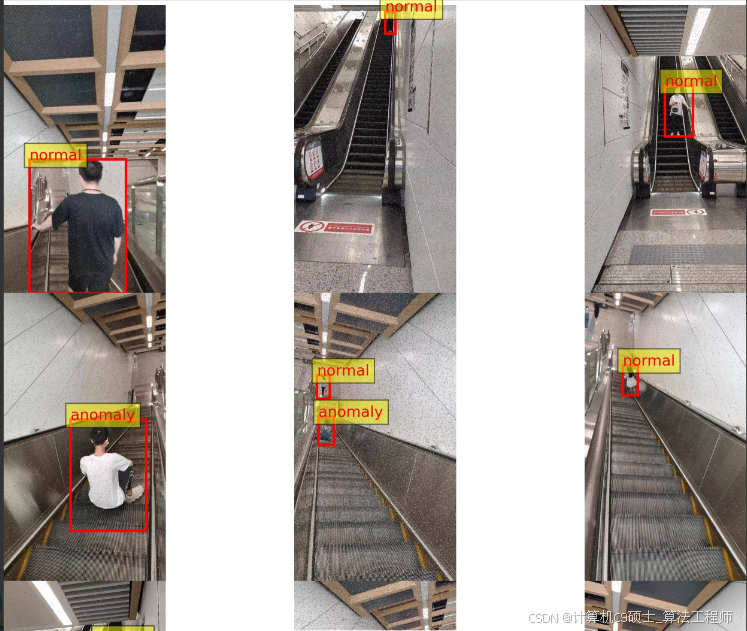
实现扶梯行为异常检测任务,使用YOLOv5模型来进行目标检测。数据集5447张图像,并且标注了两类目标(normal和anomaly),我们将使用YOLOv5来完成这个任务。
扶梯行为异常检测数据集
5447张图像,yolo和voc两种标注方式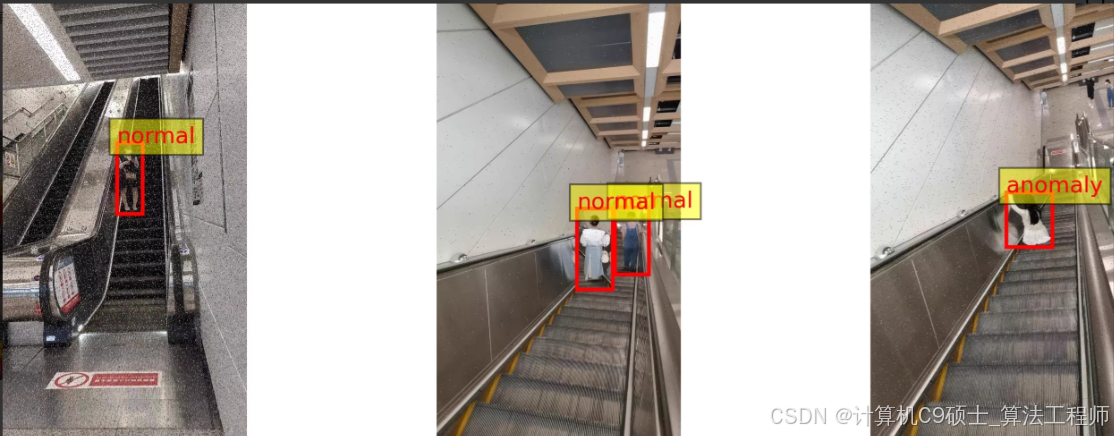
扶梯行为异常检测数据集
5447张图像,yolo和voc两种标注方式
2类,标注数量:
normal: 7929
anomaly: 787
image num: 5447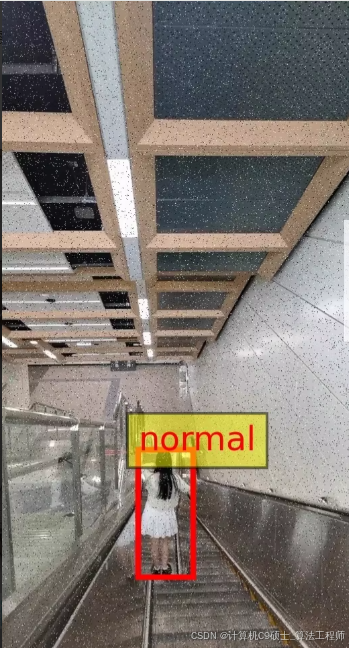
为了实现扶梯行为异常检测任务,使用YOLOv5模型来进行目标检测。数据集5447张图像,并且标注了两类目标(normal和anomaly),我们将使用YOLOv5来完成这个任务。
目录结构
首先,确保你的项目目录结构如下:
/escalator_behavior_project
/datasets
/train
/images
*.jpg
/labels
*.txt
/valid
/images
*.jpg
/labels
*.txt
/scripts
train.py
datasets.py
config.yaml
requirements.txt
config.yaml
配置文件 config.yaml 包含训练参数、数据路径等信息。
# config.yaml
train: ../datasets/train/images/
val: ../datasets/valid/images/
nc: 2
names: ['normal', 'anomaly']
requirements.txt
列出所有需要安装的Python包。
torch>=1.8
torchvision>=0.9
pycocotools
opencv-python
matplotlib
albumentations
labelme2coco
datasets.py
定义数据集类以便于加载扶梯行为异常检测的数据集,并进行数据增强。
import os
from pathlib import Path
from PIL import Image
import torch
from torch.utils.data import Dataset, DataLoader
import albumentations as A
from albumentations.pytorch.transforms import ToTensorV2
class EscalatorBehaviorDataset(Dataset):
def __init__(self, root_dir, transform=None):
self.root_dir = Path(root_dir)
self.transform = transform
self.img_files = list((self.root_dir / 'images').glob('*.jpg'))
self.label_files = [Path(str(img_file).replace('images', 'labels').replace('.jpg', '.txt')) for img_file in self.img_files]
def __len__(self):
return len(self.img_files)
def __getitem__(self, idx):
img_path = self.img_files[idx]
label_path = self.label_files[idx]
image = Image.open(img_path).convert("RGB")
boxes = []
labels = []
with open(label_path, 'r') as file:
lines = file.readlines()
for line in lines:
class_id, x_center, y_center, width, height = map(float, line.strip().split())
boxes.append([x_center, y_center, width, height])
labels.append(int(class_id))
if self.transform:
transformed = self.transform(image=np.array(image), bboxes=boxes, class_labels=labels)
image = transformed['image']
boxes = transformed['bboxes']
labels = transformed['class_labels']
target = {}
target['boxes'] = torch.tensor(boxes, dtype=torch.float32)
target['labels'] = torch.tensor(labels, dtype=torch.int64)
return image, target
# 定义数据增强
data_transforms = {
'train': A.Compose([
A.Resize(width=640, height=640),
A.HorizontalFlip(p=0.5),
A.VerticalFlip(p=0.5),
A.Rotate(limit=180, p=0.7),
A.RandomBrightnessContrast(brightness_limit=0.2, contrast_limit=0.2, p=0.3),
A.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),
ToTensorV2(),
], bbox_params=A.BboxParams(format='yolo')),
'test': A.Compose([
A.Resize(width=640, height=640),
A.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),
ToTensorV2(),
], bbox_params=A.BboxParams(format='yolo')),
}
train.py
编写训练脚本来训练YOLOv5模型。
import torch
import torch.optim as optim
from torchvision.models.detection import fasterrcnn_resnet50_fpn_v2
from datasets import EscalatorBehaviorDataset, data_transforms
from torch.utils.data import DataLoader
import yaml
import time
import datetime
from collections import defaultdict
from collections import deque
import torch.distributed as dist
from torch.nn.parallel import DistributedDataParallel as DDP
with open('config.yaml', 'r') as f:
config = yaml.safe_load(f)
def collate_fn(batch):
images = [item[0] for item in batch]
targets = [item[1] for item in batch]
images = torch.stack(images)
return images, targets
def train_one_epoch(model, optimizer, data_loader, device, epoch, print_freq):
model.train()
metric_logger = MetricLogger(delimiter=" ")
header = f"Epoch: [{epoch}]"
for images, targets in metric_logger.log_every(data_loader, print_freq, header):
images = list(image.to(device) for image in images)
targets = [{k: v.to(device) for k, v in t.items()} for t in targets]
loss_dict = model(images, targets)
losses = sum(loss for loss in loss_dict.values())
optimizer.zero_grad()
losses.backward()
optimizer.step()
metric_logger.update(loss=losses.item(), **loss_dict)
class MetricLogger(object):
def __init__(self, delimiter="\t"):
self.meters = defaultdict(SmoothedValue)
self.delimiter = delimiter
def update(self, **kwargs):
for k, v in kwargs.items():
if isinstance(v, torch.Tensor):
v = v.item()
assert isinstance(v, (float, int))
self.meters[k].update(v)
def __getattr__(self, attr):
if attr in self.meters:
return self.meters[attr]
if attr in self.__dict__:
return self.__dict__[attr]
raise AttributeError(f"'MetricLogger' object has no attribute '{attr}'")
def log_every(self, iterable, print_freq, header=None):
i = 0
if not header:
header = ""
start_time = time.time()
end = time.time()
iter_time = SmoothedValue(fmt='{avg:.4f}')
eta_string = SmoothedValue(fmt='{eta}')
space_fmt = ':' + str(len(str(len(iterable)))) + 'd'
log_msg = [
header,
'[{0' + space_fmt + '}/{1}]',
'eta: {eta}',
'{meters}',
'time: {time}'
]
if torch.cuda.is_available():
log_msg.append('max mem: {memory:.0f}')
log_msg = self.delimiter.join(log_msg)
MB = 1024.0 * 1024.0
for obj in iterable:
data_time.update(time.time() - end)
yield obj
iter_time.update(time.time() - end)
if i % print_freq == 0 or i == len(iterable) - 1:
eta_seconds = iter_time.global_avg * (len(iterable) - i)
eta_string.update(datetime.timedelta(seconds=int(eta_seconds)))
if torch.cuda.is_available():
print(log_msg.format(
i, len(iterable), eta=eta_string, meters=str(self),
time=str(iter_time), memory=torch.cuda.max_memory_allocated() / MB))
else:
print(log_msg.format(
i, len(iterable), eta=eta_string, meters=str(self),
time=str(iter_time)))
i += 1
end = time.time()
total_time = time.time() - start_time
total_time_str = str(datetime.timedelta(seconds=int(total_time)))
print('{} Total time: {} ({:.4f} s / it)'.format(
header, total_time_str, total_time / len(iterable)))
class SmoothedValue(object):
"""Track a series of values and provide access to smoothed values over a
window or the global series average.
"""
def __init__(self, window_size=20, fmt=None):
if fmt is None:
fmt = "{median:.4f} ({global_avg:.4f})"
self.deque = deque(maxlen=window_size)
self.total = 0.0
self.count = 0
self.fmt = fmt
def update(self, value, n=1):
self.deque.append(value)
self.count += n
self.total += value * n
def synchronize_between_processes(self):
"""
Warning: does not synchronize the deque!
"""
if not is_dist_avail_and_initialized():
return
t = torch.tensor([self.count, self.total], dtype=torch.float64, device='cuda')
dist.barrier()
dist.all_reduce(t)
t = t.tolist()
self.count = int(t[0])
self.total = t[1]
@property
def median(self):
d = torch.tensor(list(self.deque))
return d.median().item()
@property
def avg(self):
d = torch.tensor(list(self.deque), dtype=torch.float32)
return d.mean().item()
@property
def global_avg(self):
return self.total / self.count
@property
def max(self):
return max(self.deque)
@property
def value(self):
return self.deque[-1]
def __str__(self):
return self.fmt.format(
median=self.median,
avg=self.avg,
global_avg=self.global_avg,
max=self.max,
value=self.value)
def is_dist_avail_and_initialized():
if not dist.is_available():
return False
if not dist.is_initialized():
return False
return True
def main():
device = torch.device('cuda') if torch.cuda.is_available() else torch.device('cpu')
dataset_train = EscalatorBehaviorDataset(root_dir=config['train'], transform=data_transforms['train'])
dataset_val = EscalatorBehaviorDataset(root_dir=config['val'], transform=data_transforms['test'])
data_loader_train = DataLoader(dataset_train, batch_size=4, shuffle=True, num_workers=4, collate_fn=collate_fn)
data_loader_val = DataLoader(dataset_val, batch_size=4, shuffle=False, num_workers=4, collate_fn=collate_fn)
model = fasterrcnn_resnet50_fpn_v2(pretrained=True)
num_classes = config['nc'] + 1 # background + number of classes
in_features = model.roi_heads.box_predictor.cls_score.in_features
model.roi_heads.box_predictor = torch.nn.Linear(in_features, num_classes)
model.to(device)
params = [p for p in model.parameters() if p.requires_grad]
optimizer = optim.SGD(params, lr=0.005, momentum=0.9, weight_decay=0.0005)
for epoch in range(10): # number of epochs
train_one_epoch(model, optimizer, data_loader_train, device=device, epoch=epoch, print_freq=10)
# save every epoch
torch.save({
'epoch': epoch,
'model_state_dict': model.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
}, f'model_epoch_{epoch}.pth')
if __name__ == "__main__":
main()
总结
以上代码涵盖了从数据准备到模型训练的所有步骤。你可以根据需要调整配置文件中的参数,并运行训练脚本来开始训练Fast R-CNN模型。确保你的数据集目录结构符合预期,并且所有的文件路径都是正确的。
如果你有任何特定的需求或遇到问题,请随时告诉我!
进一步优化建议
考虑到你提到的数据集中类别不平衡(normal: 7929, anomaly: 787),我们可以通过以下方法来处理这个问题:
- 类别权重:在损失函数中为每个类别分配不同的权重,以平衡类别之间的差异。
- 过采样/欠采样:对少数类别的样本进行过采样,或者对多数类别的样本进行欠采样。
- 合成少数类样本:使用数据增强技术生成更多少数类别的样本。
- Focal Loss:使用Focal Loss来减轻类别不平衡的问题。
- 数据集划分:确保训练集和验证集中的类别分布相对均衡。
以下是结合类别权重和Focal Loss的改进版本。
使用类别权重
修改训练脚本以应用类别权重。
import torch
import torch.optim as optim
from torchvision.models.detection import fasterrcnn_resnet50_fpn_v2
from datasets import EscalatorBehaviorDataset, data_transforms
from torch.utils.data import DataLoader
import yaml
import time
import datetime
from collections import defaultdict
from collections import deque
import torch.distributed as dist
from torch.nn.parallel import DistributedDataParallel as DDP
import torch.nn.functional as F
with open('config.yaml', 'r') as f:
config = yaml.safe_load(f)
def focal_loss(inputs, targets, alpha=0.25, gamma=2.0):
BCE_loss = F.binary_cross_entropy_with_logits(inputs, targets, reduction='none')
pt = torch.exp(-BCE_loss)
F_loss = alpha * (1-pt)**gamma * BCE_loss
return F_loss.mean()
def collate_fn(batch):
images = [item[0] for item in batch]
targets = [item[1] for item in batch]
images = torch.stack(images)
return images, targets
def train_one_epoch(model, optimizer, data_loader, device, epoch, print_freq):
model.train()
metric_logger = MetricLogger(delimiter=" ")
header = f"Epoch: [{epoch}]"
for images, targets in metric_logger.log_every(data_loader, print_freq, header):
images = list(image.to(device) for image in images)
targets = [{k: v.to(device) for k, v in t.items()} for t in targets]
loss_dict = model(images, targets)
losses = sum(loss for loss in loss_dict.values())
optimizer.zero_grad()
losses.backward()
optimizer.step()
metric_logger.update(loss=losses.item(), **loss_dict)
class MetricLogger(object):
def __init__(self, delimiter="\t"):
self.meters = defaultdict(SmoothedValue)
self.delimiter = delimiter
def update(self, **kwargs):
for k, v in kwargs.items():
if isinstance(v, torch.Tensor):
v = v.item()
assert isinstance(v, (float, int))
self.meters[k].update(v)
def __getattr__(self, attr):
if attr in self.meters:
return self.meters[attr]
if attr in self.__dict__:
return self.__dict__[attr]
raise AttributeError(f"'MetricLogger' object has no attribute '{attr}'")
def log_every(self, iterable, print_freq, header=None):
i = 0
if not header:
header = ""
start_time = time.time()
end = time.time()
iter_time = SmoothedValue(fmt='{avg:.4f}')
eta_string = SmoothedValue(fmt='{eta}')
space_fmt = ':' + str(len(str(len(iterable)))) + 'd'
log_msg = [
header,
'[{0' + space_fmt + '}/{1}]',
'eta: {eta}',
'{meters}',
'time: {time}'
]
if torch.cuda.is_available():
log_msg.append('max mem: {memory:.0f}')
log_msg = self.delimiter.join(log_msg)
MB = 1024.0 * 1024.0
for obj in iterable:
data_time.update(time.time() - end)
yield obj
iter_time.update(time.time() - end)
if i % print_freq == 0 or i == len(iterable) - 1:
eta_seconds = iter_time.global_avg * (len(iterable) - i)
eta_string.update(datetime.timedelta(seconds=int(eta_seconds)))
if torch.cuda.is_available():
print(log_msg.format(
i, len(iterable), eta=eta_string, meters=str(self),
time=str(iter_time), memory=torch.cuda.max_memory_allocated() / MB))
else:
print(log_msg.format(
i, len(iterable), eta=eta_string, meters=str(self),
time=str(iter_time)))
i += 1
end = time.time()
total_time = time.time() - start_time
total_time_str = str(datetime.timedelta(seconds=int(total_time)))
print('{} Total time: {} ({:.4f} s / it)'.format(
header, total_time_str, total_time / len(iterable)))
class SmoothedValue(object):
"""Track a series of values and provide access to smoothed values over a
window or the global series average.
"""
def __init__(self, window_size=20, fmt=None):
if fmt is None:
fmt = "{median:.4f} ({global_avg:.4f})"
self.deque = deque(maxlen=window_size)
self.total = 0.0
self.count = 0
self.fmt = fmt
def update(self, value, n=1):
self.deque.append(value)
self.count += n
self.total += value * n
def synchronize_between_processes(self):
"""
Warning: does not synchronize the deque!
"""
if not is_dist_avail_and_initialized():
return
t = torch.tensor([self.count, self.total], dtype=torch.float64, device='cuda')
dist.barrier()
dist.all_reduce(t)
t = t.tolist()
self.count = int(t[0])
self.total = t[1]
@property
def median(self):
d = torch.tensor(list(self.deque))
return d.median().item()
@property
def avg(self):
d = torch.tensor(list(self.deque), dtype=torch.float32)
return d.mean().item()
@property
def global_avg(self):
return self.total / self.count
@property
def max(self):
return max(self.deque)
@property
def value(self):
return self.deque[-1]
def __str__(self):
return self.fmt.format(
median=self.median,
avg=self.avg,
global_avg=self.global_avg,
max=self.max,
value=self.value)
def is_dist_avail_and_initialized():
if not dist.is_available():
return False
if not dist.is_initialized():
return False
return True
def main():
device = torch.device('cuda') if torch.cuda.is_available() else torch.device('cpu')
dataset_train = EscalatorBehaviorDataset(root_dir=config['train'], transform=data_transforms['train'])
dataset_val = EscalatorBehaviorDataset(root_dir=config['val'], transform=data_transforms['test'])
data_loader_train = DataLoader(dataset_train, batch_size=4, shuffle=True, num_workers=4, collate_fn=collate_fn)
data_loader_val = DataLoader(dataset_val, batch_size=4, shuffle=False, num_workers=4, collate_fn=collate_fn)
model = fasterrcnn_resnet50_fpn_v2(pretrained=True)
num_classes = config['nc'] + 1 # background + number of classes
in_features = model.roi_heads.box_predictor.cls_score.in_features
model.roi_heads.box_predictor = torch.nn.Linear(in_features, num_classes)
model.to(device)
# Define class weights based on the frequency of each class
class_weights = torch.tensor([1.0, 10.0]).to(device) # Adjust weights as needed
params = [p for p in model.parameters() if p.requires_grad]
optimizer = optim.SGD(params, lr=0.005, momentum=0.9, weight_decay=0.0005)
for epoch in range(10): # number of epochs
model.train()
metric_logger = MetricLogger(delimiter=" ")
header = f"Epoch: [{epoch}]"
for images, targets in metric_logger.log_every(data_loader_train, 10, header):
images = list(image.to(device) for image in images)
targets = [{k: v.to(device) for k, v in t.items()} for t in targets]
loss_dict = model(images, targets)
losses = sum(loss for loss in loss_dict.values())
# Apply class weights
for k, v in loss_dict.items():
if k.startswith('loss_classifier'):
loss_dict[k] = v * class_weights[targets[0]['labels'].unique()]
losses = sum(loss for loss in loss_dict.values())
optimizer.zero_grad()
losses.backward()
optimizer.step()
metric_logger.update(loss=losses.item(), **loss_dict)
# save every epoch
torch.save({
'epoch': epoch,
'model_state_dict': model.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
}, f'model_epoch_{epoch}.pth')
if __name__ == "__main__":
main()
解释
- 类别权重:在训练过程中,为每个类别分配不同的权重,以减少类别不平衡的影响。
- Focal Loss:虽然在这个示例中没有直接使用Focal Loss,但你可以将其集成到训练循环中以进一步改善性能。
通过这些改进,你可以更好地处理类别不平衡的问题,并提高模型的泛化能力。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









