






什么是SLAM
首先,迎来灵魂一问:什么是SLAM?
SLAM :simultaneous localization and mapping--即时定位与地图构建。
“翻译”过来就是:将机器人放入未知环境中,让机器人一边逐步描绘出此环境完全的地图,同时一边决定机器人应该往哪个方向行进。
举个例子:be like 大雾天散步一边走一边“加载”周围环境:

▲图片来自于网络
为什么是单目SLAM
回答以上问题之前,我们先来看SLAM在VR/AR方面的应用:辅助增强视觉效果。
没有SLAM的AR眼镜可以干啥?观影、游戏、多屏办公是没问题。
但有了SLAM的加持,AR眼镜才能玩转AR导航,以及看到虚实结合的奇幻世界。
简而言之,AR有了SLAM才是真的AR,进化到具备三维感知的能力,和现实世界交互。
目前常见的是双目、四目的SLAM,那为什么单目SLAM如此惹人爱--这就主打一个“轻量化”,香就香在:成本降低!重量减轻!体积减少!功耗降低!

▲图片来自于网络
单目SLAM相较于双目SLAM最大的难度在于没有双目视差,去做深度信息估计。单目只有一个摄像头,只能通过位移运动,获得环境的不同角度的图像,获得视差信息再做深度估计。
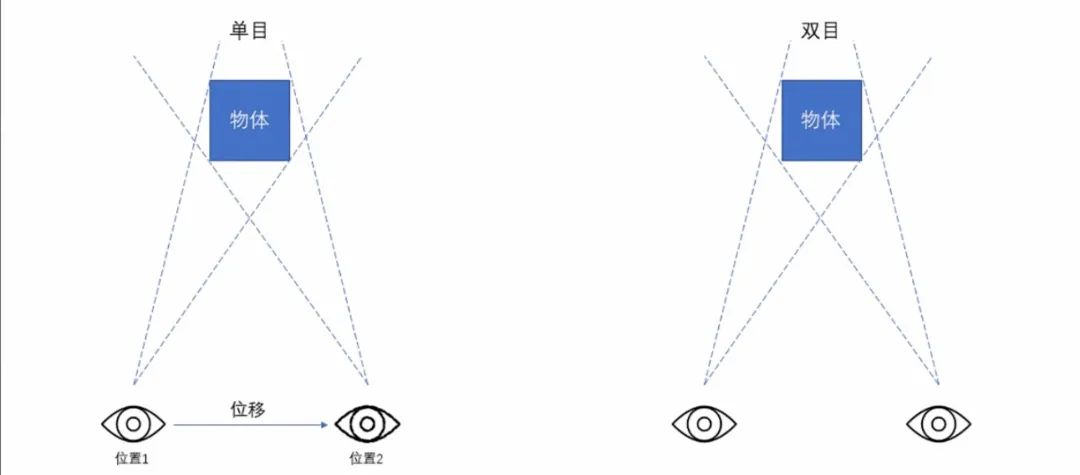
▲图片来自于B站“元莱如此”
联合影像与Rokid的单目SLAM
单目SLAM技术能够构建视觉效果真实的地图,从而针对当前视角渲染虚拟物体的叠加效果,使操作体验更真实没有违和感;同时能够做出好价格的量产品,能够帮助更广泛的用户走进“新世界”。

▲图片来自于Rokid
联合影像作为Rokid单目camera module的提供方,有幸一起推动更多的人使用、体验、反馈单目SLAM技术,助力产品力,正向驱动产品迭代,驶向元宇宙的星辰大海!
AR camera module

see through camera module


▲以上资料来自联合影像小程序商城

















 1368
1368

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









