









Transformer 模型是一种基于自注意力机制(Self-Attention Mechanism)的深度学习架构,主要用于自然语言处理(NLP)和计算机视觉(CV)等领域。以下是关于 Transformer 模型的详细介绍:
1. 背景与动机
在 Transformer 模型出现之前,循环神经网络(RNN)及其变体(如 LSTM 和 GRU)是处理序列数据的主要方法。然而,RNN 类模型存在一些问题,例如训练速度慢、难以并行化计算、对长距离依赖关系的捕捉能力有限等。
Transformer 模型由 Vaswani 等人在 2017 年的论文《Attention Is All You Need》中首次提出。它完全摒弃了 RNN 结构,完全基于注意力机制来处理序列数据,极大地提高了模型的训练速度和性能。
2. 核心架构
Transformer 模型主要由以下几部分组成:
(1)编码器(Encoder)
编码器由多个相同的层(通常称为 Encoder Layer)堆叠而成。每一层包括两个主要模块:多头自注意力机制(Multi-Head Self-Attention)和前馈神经网络(Feed-Forward Neural Network)。
多头自注意力机制:通过将输入分成多个“头”,分别计算注意力权重,然后将这些结果拼接起来,使得模型能够从不同的角度捕捉输入序列中的信息。例如,在机器翻译任务中,模型可以通过多头注意力机制同时关注源语言句子中的不同部分,更好地理解句子的语义。
前馈神经网络:对多头自注意力机制的输出进行非线性变换,进一步提取特征。
每个模块后面都跟有残差连接(Residual Connection)和层归一化(Layer Normalization),残差连接可以帮助缓解深层网络训练中的梯度消失问题,层归一化则可以稳定训练过程。
(2)解码器(Decoder)
解码器的结构与编码器类似,但每一层除了包含多头自注意力机制和前馈神经网络外,还多了一个多头注意力机制模块,用于关注编码器的输出。这个模块使得解码器能够利用编码器提取的源序列信息来生成目标序列。
例如,在机器翻译任务中,解码器在生成目标语言句子的过程中,会通过这个多头注意力机制模块不断参考编码器对源语言句子的编码结果,从而生成更准确的翻译。
(3)位置编码(Positional Encoding)
由于 Transformer 模型本身不具有像 RNN 那样的时间序列结构,无法直接捕捉序列中的位置信息。因此,位置编码被添加到输入嵌入(Embedding)中,以帮助模型了解单词或符号在序列中的位置关系。
位置编码可以采用正弦和余弦函数的形式来表示不同位置的唯一信息,使得模型能够区分序列中不同位置的元素。
3. 训练过程
在训练 Transformer 模型时,通常使用交叉熵损失函数来衡量模型生成的目标序列与真实目标序列之间的差异。
由于模型的结构较为复杂,训练过程中需要使用大量的数据和计算资源。为了提高训练效率,通常会采用一些优化技巧,如使用 Adam 优化器、学习率预热(Learning Rate Warmup)等。
4. 优点
并行化能力强:与 RNN 不同,Transformer 模型在处理序列数据时不需要按顺序逐个处理序列中的元素,因此可以充分利用现代计算设备的并行计算能力,大大加快训练速度。
捕捉长距离依赖能力强:自注意力机制使得模型能够直接计算序列中任意两个位置之间的关系,从而更好地捕捉长距离依赖关系。例如,在处理长文本时,Transformer 模型能够更好地理解文本中的上下文信息。
扩展性强:Transformer 模型的架构相对简单且灵活,可以通过增加模型的层数、隐藏单元数等来提高模型的性能。此外,还可以在模型的基础上进行各种变体和改进,以适应不同的任务需求。
5. 应用领域
自然语言处理(NLP):Transformer 模型在机器翻译、文本生成、文本分类、问答系统等任务中取得了显著的成果。例如,Google 的 BERT(Bidirectional Encoder Representations from Transformers)模型就是基于 Transformer 架构的预训练语言模型,在许多 NLP 任务中都取得了 SOTA(State-of-the-Art)性能。
计算机视觉(CV):Transformer 模型也被引入到计算机视觉领域,如目标检测、图像分类等任务中。通过将图像分割成多个小块(Patch),然后将这些小块作为序列输入到 Transformer 模型中,模型能够捕捉图像中的全局信息和局部信息,从而提高模型的性能。
6. 局限性
计算资源需求大:Transformer 模型的参数量通常较大,训练和推理过程需要大量的计算资源。例如,一些大型的 Transformer 模型可能需要使用多个高性能 GPU 进行训练。
难以处理超长序列:虽然 Transformer 模型能够捕捉长距离依赖关系,但当序列长度过长时,其计算复杂度会急剧增加,导致训练和推理速度变慢。为了解决这个问题,研究人员提出了一些改进方法,如稀疏注意力机制等。
模型解释性差:与一些传统的机器学习模型相比,Transformer 模型的内部工作机制相对复杂,难以直观地解释模型的决策过程。这在一些对模型可解释性要求较高的应用场景中可能会带来一定的问题。
近年来,随着卷积神经网络(CNN)等深度学习技术的飞速发展,人工智能迎来了第三次发展浪潮,AI技术在各行各业中的应用日益广泛。
注意力机制:理解其在现代深度学习中的关键作用;
Transformer模型:深入剖析BERT、GPT(1/2/3/3.5/4)、DETR、ViT、Swin Transformer等经典模型的原理与应用;
生成式模型:探索变分自编码器VAE、生成式对抗网络GAN、扩散模型(Diffusion Model)等技术;
目标检测算法:详细介绍R-CNN、Fast R-CNN、Faster R-CNN、YOLO、SSD等算法的实现与优化;
图神经网络:深入研究GCN、GAT、GIN等图神经网络模型的应用;
强化学习:解析Q-Learning、DQN等经典强化学习算法;
深度学习模型可解释性与可视化:介绍CAM、Grad-CAM、LIME、t-SNE等技术,提升模型的可理解性。
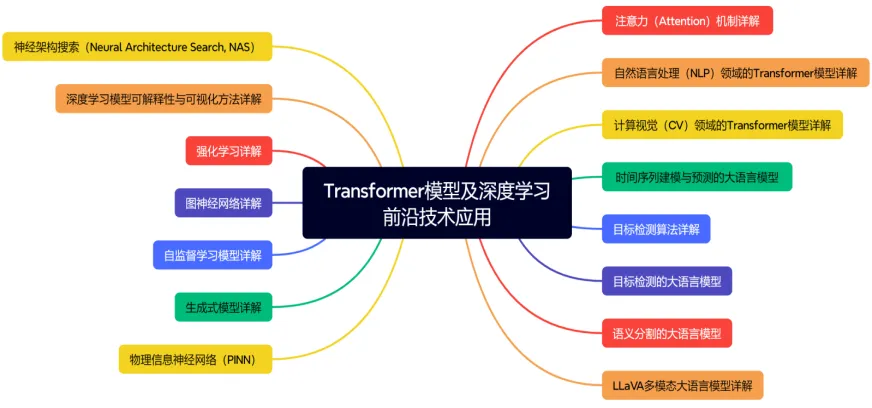
第一章、注意力(Attention)机制
1、注意力机制的背景和动机(为什么需要注意力机制?注意力机制的起源和发展里程碑)。
2、注意力机制的基本原理(什么是注意力机制?注意力机制的数学表达与基本公式、用机器翻译任务带你了解Attention机制、如何计算注意力权重?)
3、注意力机制的主要类型:键值对注意力机制(Key-Value Attention)、自注意力(Self-Attention)与多头注意力(Multi-Head Attention)、Soft Attention 与 Hard Attention、全局(Global)与局部(Local)注意力
4、注意力机制的优化与变体:稀疏注意力(Sparse Attention)、自适应注意力(Adaptive Attention)、动态注意力机制(Dynamic Attention)、跨模态注意力机制(Cross-Modal Attention)
5、注意力机制的可解释性与可视化技术:注意力权重的可视化(权重热图)
6、案例
第二章、自然语言处理(NLP)领域的Transformer模型
1、Transformer模型的提出背景(从RNN、LSTM到注意力机制的演进、Transformer模型的诞生背景及其在自然语言处理和计算视觉中的重要性)
2、Transformer模型的进化之路(RCTM→RNN Encoder-Decoder→Bahdanau Attention→Luong Attention→Self Attention)
3、Transformer模型拓扑结构(编码器、解码器、多头自注意力机制、前馈神经网络、层归一化和残差连接等)
4、Transformer模型工作原理(输入数据的Embedding、位置编码、层规范化、带掩码的自注意力层、编码器到解码器的多头注意力层、编码器的完整工作流程、解码器的完整工作流程、Transformer模型的损失函数)
5、BERT模型的工作原理(输入表示、多层Transformer编码器、掩码语言模型MLM、下一句预测NSP)
6、GPT系列模型(GPT-1 / GPT-2 / GPT-3 / GPT-3.5 / GPT-4)的工作原理(单向语言模型、预训练、自回归生成、Zero-shot Learning、上下文学习、RLHF人类反馈强化学习、多模态架构)
7、案例
第三章、计算视觉(CV)领域的Transformer模型
1、ViT模型(提出的背景、基本架构、与传统CNN的比较、输入图像的分块处理、位置编码、Transformer编码器、分类头、ViT模型的训练与优化、ViT模型的Python代码实现)
2、Swin Transformer模型(提出的背景、基本架构、与ViT模型的比较、分层架构、窗口机制、位置编码、Transformer编码器、模型的训练与优化、模型的Python代码实现)
3、DETR模型(提出的背景、基本架构、与RCNN、YOLO系列模型的比较、双向匹配损失与匈牙利匹配算法、匹配损失与框架损失、模型的训练与优化、模型的Python代码实现)
4、案例
第四章、时间序列建模与预测的大语言模型
1、时间序列建模的大语言模型技术细节(基于Transformer的时间序列预测原理、自注意力机制、编码器-解码器结构、位置编码)
2、时间序列建模的大语言模型训练
3、Time-LLM模型详解(拓扑结构简介、重新编程时间序列输入、Prompt-as-Prefix (PaP)等)
4、基于TimeGPT的时间序列预测(TimeGPT工作原理详解、TimeGPT库的安装与使用)
5、案例
第五章、目标检测算法
1、目标检测任务与图像分类识别任务的区别与联系。
2、两阶段(Two-stage)目标检测算法:R-CNN、Fast R-CNN、Faster R-CNN(RCNN的工作原理、Fast R-CNN和Faster R-CNN的改进之处 )。
3、一阶段(One-stage)目标检测算法:YOLO模型、SDD模型(拓扑结构及工作原理)。
4、案例
第六章、目标检测的大语言模型
1、基于大语言模型的目标检测的工作原理(输入图像的特征提取、文本嵌入的生成、视觉和语言特征的融合、目标检测与输出)
2、目标检测领域的大语言模型概述(Pix2Seq、Grounding DINO、Lenna等)
3、案例
第七章、语义分割的大语言模型
1、基于大语言模型的语义分割的工作原理(图像特征提取、文本嵌入生成、跨模态融合、分割预测)
2、语义分割领域的大语言模型概述(ProLab、Segment Anything Model、CLIPSeg、Segment Everything Everywhere Model等)
3、案例
第八章、LLaVA多模态大语言模型
1、LLaVA的核心技术与工作原理(模型拓扑结构讲解)
2、LLaVA与其他多模态模型的区别(LLaVA模型的优势有哪些?)
3、LLaVA的架构与训练(LLaVA的多模态输入处理与特征表示、视觉编码器与语言模型的结合、LLaVA的训练数据与预训练过程)
4、LLaVA的典型应用场景(图像问答、图像生成与描述等)
5、案例
第九章、物理信息神经网络(PINN)
1、物理信息神经网络的背景(物理信息神经网络(PINNs)的概念及其在科学计算中的重要性、传统数值模拟方法与PINNs的比较)
2、PINN工作原理:物理定律与方程的数学表达、如何将物理定律嵌入到神经网络模型中?PINN的架构(输入层、隐含层、输出层的设计)、物理约束的形式化(如何将边界条件等物理知识融入网络?)损失函数的设计(数据驱动与物理驱动的损失项)
3、案例
第十章、生成式模型
1、变分自编码器VAE(自编码器的基本结构与工作原理、降噪自编码器、掩码自编码器、变分推断的基本概念及其与传统贝叶斯推断的区别、VAE的编码器和解码器结构及工作原理)。
2、生成式对抗网络GAN(GAN提出的背景和动机、GAN的拓扑结构和工作原理、生成器与判别器的角色、GAN的目标函数、对抗样本的构造方法)。
3、扩散模型Diffusion Model(扩散模型的核心概念?如何使用随机过程模拟数据生成?扩散模型的工作原理)。
4、跨模态图像生成DALL.E(什么是跨模态学习?DALL.E模型的基本架构、模型训练过程)。
5、案例
第十一章、自监督学习模型
1、自监督学习的基本概念(自监督学习的发展背景、自监督学习定义、与有监督学习和无监督学习的区别)
2、经典的自监督学习模型的基本原理、模型架构及训练过程(对比学习: SimCLR、MoCo;生成式方法:AutoEncoder、GPT;预文本任务:BERT掩码语言模型)
3、自监督学习模型的Python代码实现
4、案例
第十二章、图神经网络
1、图神经网络的背景和基础知识(什么是图神经网络?图神经网络的发展历程?为什么需要图神经网络?)
2、图的基本概念和表示(图的基本组成:节点、边、属性;图的表示方法:邻接矩阵;图的类型:无向图、有向图、加权图)。
3、图神经网络的工作原理(节点嵌入和特征传播、聚合邻居信息的方法、图神经网络的层次结构)。
4、图卷积网络(GCN)的工作原理。
5、图神经网络的变种和扩展:图注意力网络(GAT)、图同构网络(GIN)、图自编码器、图生成网络。
6、案例
第十三章、强化学习
1、强化学习的基本概念和背景(什么是强化学习?强化学习与其他机器学习方法的区别?强化学习的应用领域有哪些?
2、Q-Learning(马尔可夫决策过程、Q-Learning的核心概念、什么是Q函数?Q-Learning的基本更新规则)。
3、深度Q网络(DQN)(为什么传统Q-Learning在高维或连续的状态空间中不再适用?如何使用神经网络代替Q表来估计Q值?目标网络的作用及如何提高DQN的稳定性?)
4、案例
第十四章、深度学习模型可解释性与可视化方法
1、什么是模型可解释性?为什么需要对深度学习模型进行解释?
2、可视化方法有哪些(特征图可视化、卷积核可视化、类别激活可视化等)?
3、类激活映射CAM(Class Activation Mapping)、梯度类激活映射GRAD-CAM、局部可解释模型-敏感LIME(Local Interpretable Model-agnostic Explanation)、等方法原理讲解。
4、t-SNE的基本概念及使用t-SNE可视化深度学习模型的高维特征。
5、案例
第十五章、神经架构搜索(Neural Architecture Search, NAS)
1、NAS的背景和动机(传统的神经网络设计依赖经验和直觉,既耗时又可能达不到最优效果。通过自动搜索,可以发现传统方法难以设计的创新和高效架构。)
2、NAS的基本流程:搜索空间定义(确定搜索的网络架构的元素,如层数、类型的层、激活函数等。)、搜索策略(随机搜索、贝叶斯优化、进化算法、强化学习等)、性能评估
3、NAS的关键技术:进化算法(通过模拟生物进化过程,如变异、交叉和选择,来迭代改进网络架构)、强化学习(使用策略网络来生成架构,通过奖励信号来优化策略网络)、贝叶斯优化(利用贝叶斯方法对搜索空间进行高效的全局搜索,平衡探索和利用)
4、案例


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









