






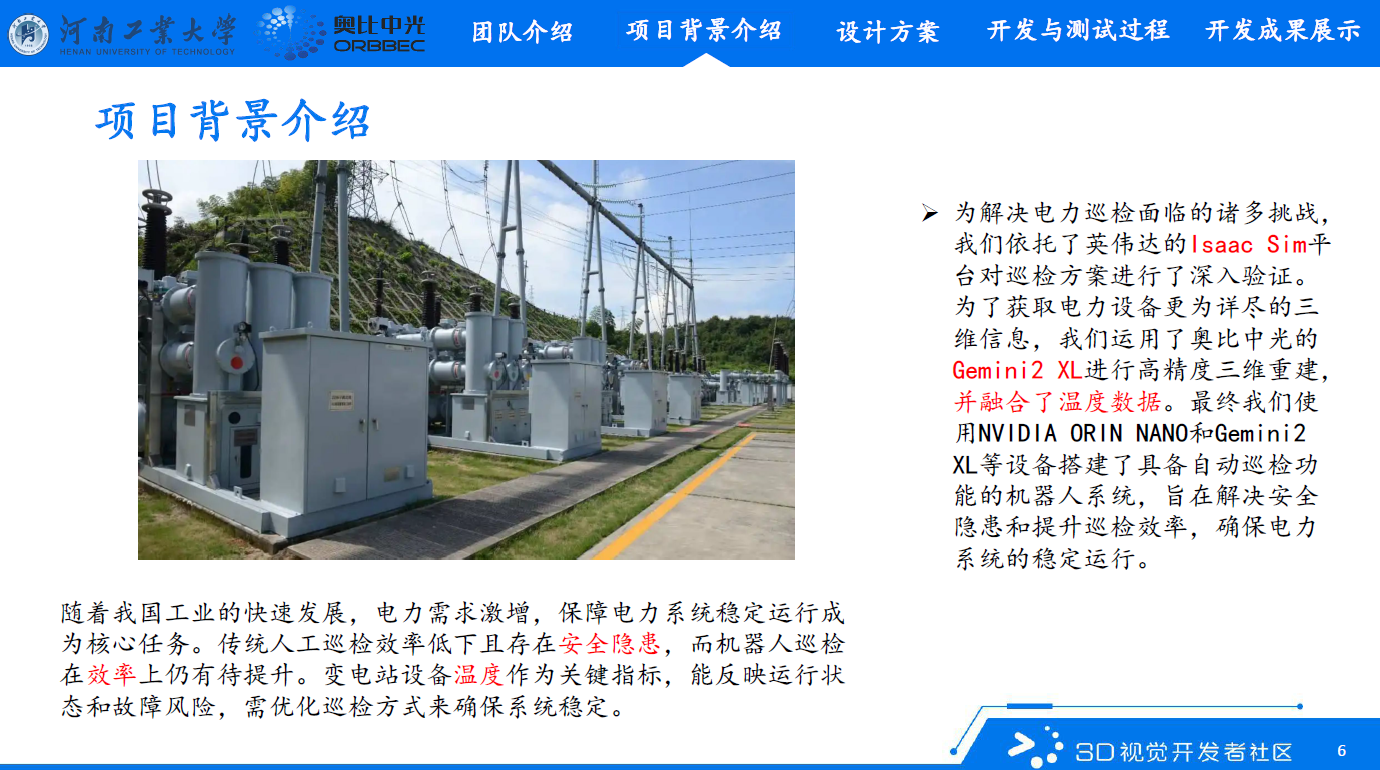
在如今这个电力需求猛增的时代,如何保证电力系统稳定运行可是头等大事。以前人工去做电力巡检,效率低不说,还特别危险。现在虽说有机器人能帮忙巡检,但也还有不少可以提升的地方。河南工业大学的团队在第四届 3D 视觉创新应用竞赛里带来了一套电力巡检机器人方案,给解决这些问题带来了新希望。
采集并融合多种数据,获取全面信息
这个方案用到了奥比中光的 Gemini2 XL 相机,它能采集到高精度的三维信息。同时,搭配热成像仪收集温度数据,最后把点云、可见光、热成像这些信息融合在一起。这么做有啥好处呢?打个比方,就好比给电力设备做了个全方位 “体检”,通过融合的数据,既能清楚看到设备的样子,又能马上发现哪里温度不正常,提前知道设备会不会出问题。
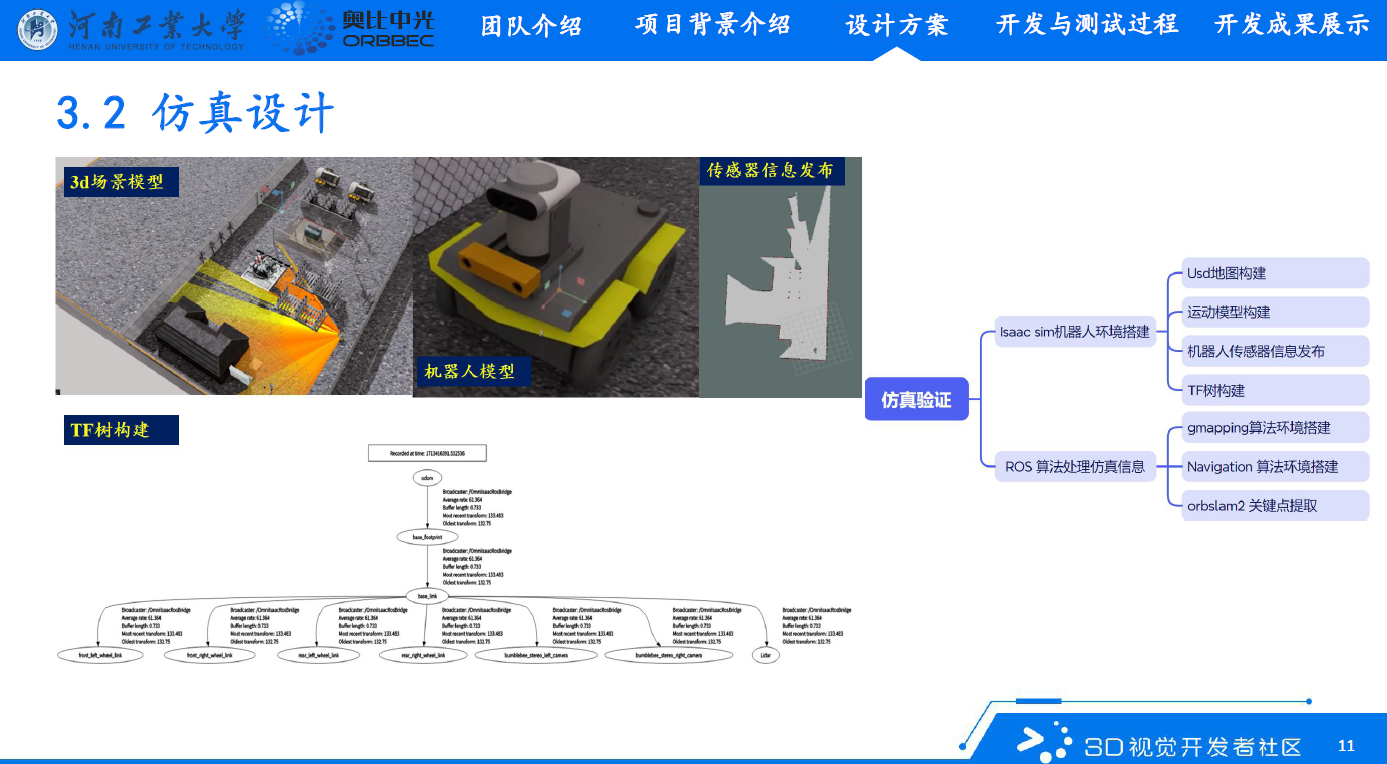
借助仿真平台开发,降低成本和风险
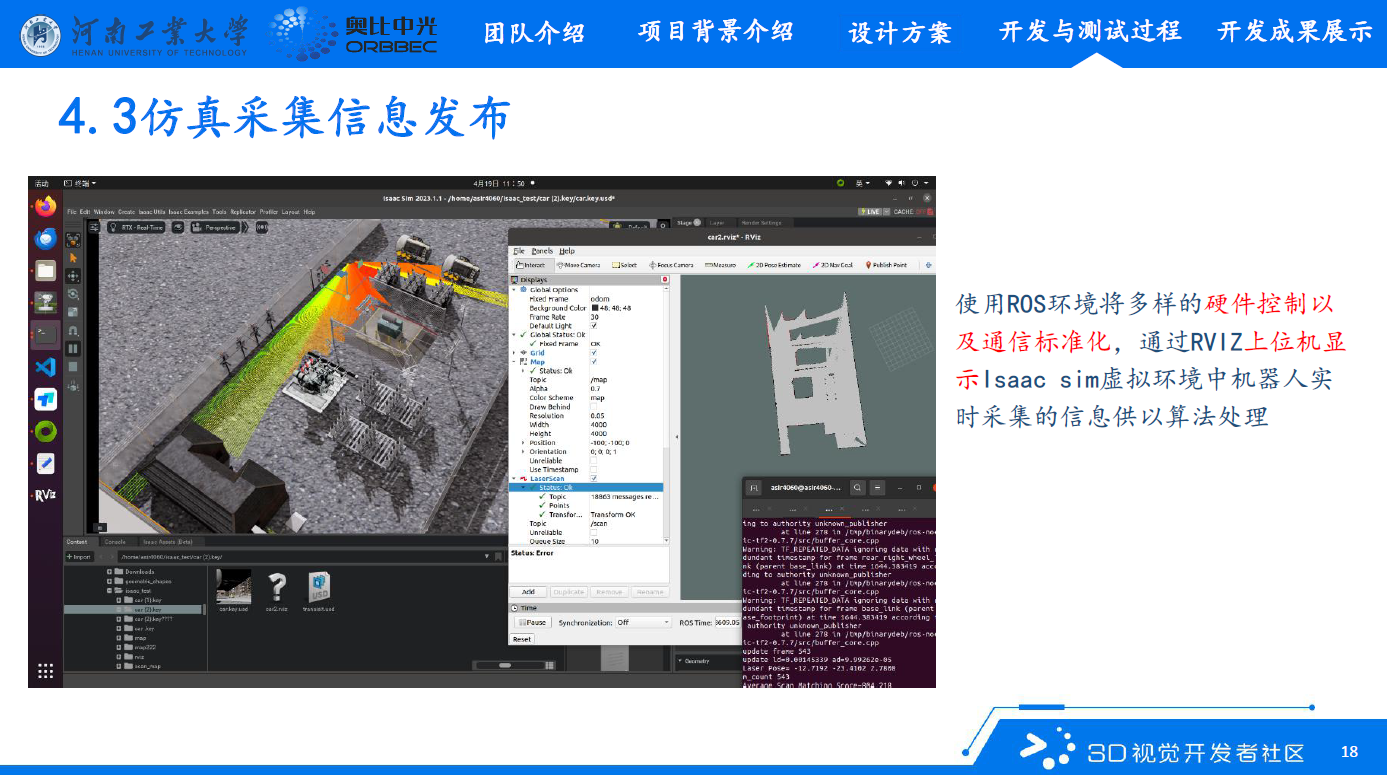
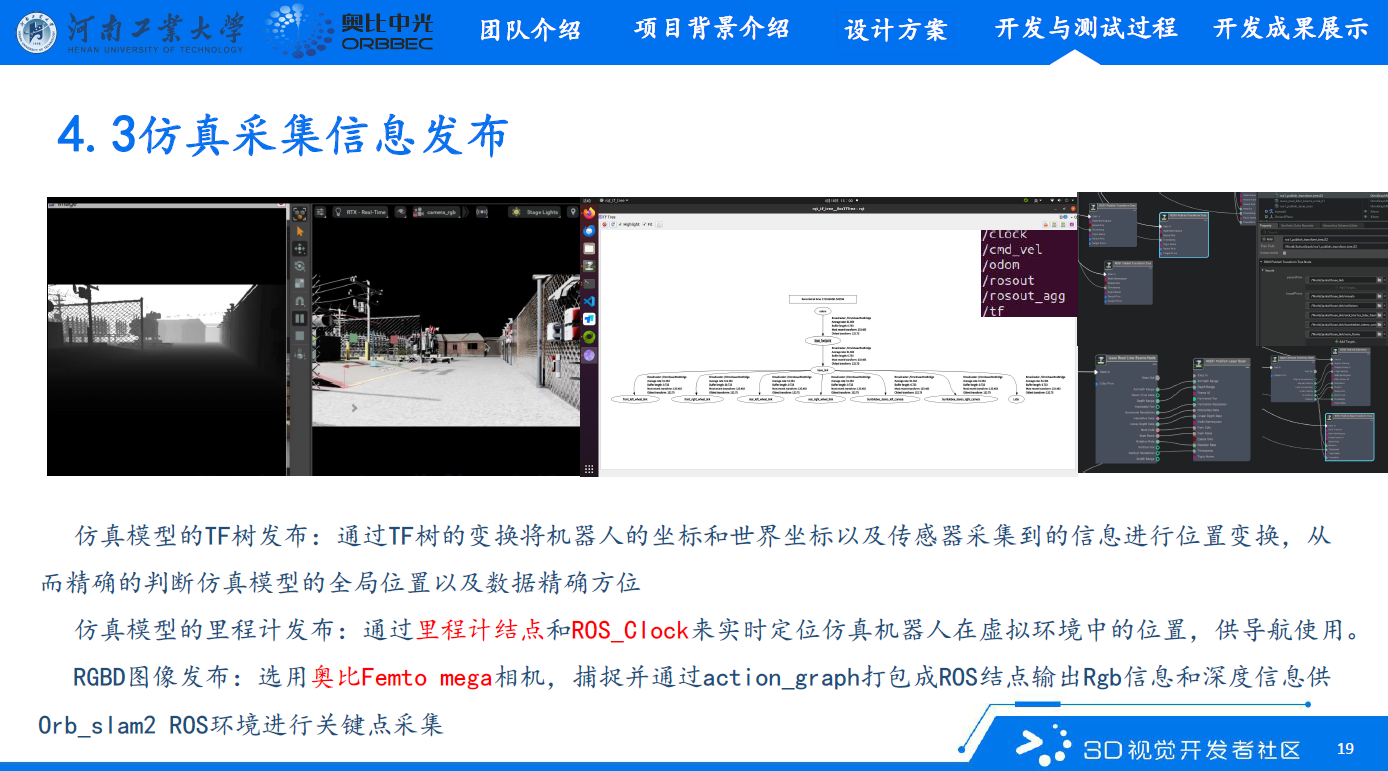
河工大团队借助英伟达的 Isaac Sim 平台来做仿真验证,这可太有用啦!在这个虚拟的仿真环境里,他们能搭建出和真实变电站差不多的场景模型,还有机器人模型,然后进行各种操作,像 TF 树构建、传感器信息发布等等。而且,还能对 gmapping 算法、orbslam2 算法这些关键技术进行测试和优化。这样一来,在真正做实物开发之前,就能知道这个巡检方案靠不靠谱,性能怎么样,避免了在实际做的时候走弯路,节省了不少成本。




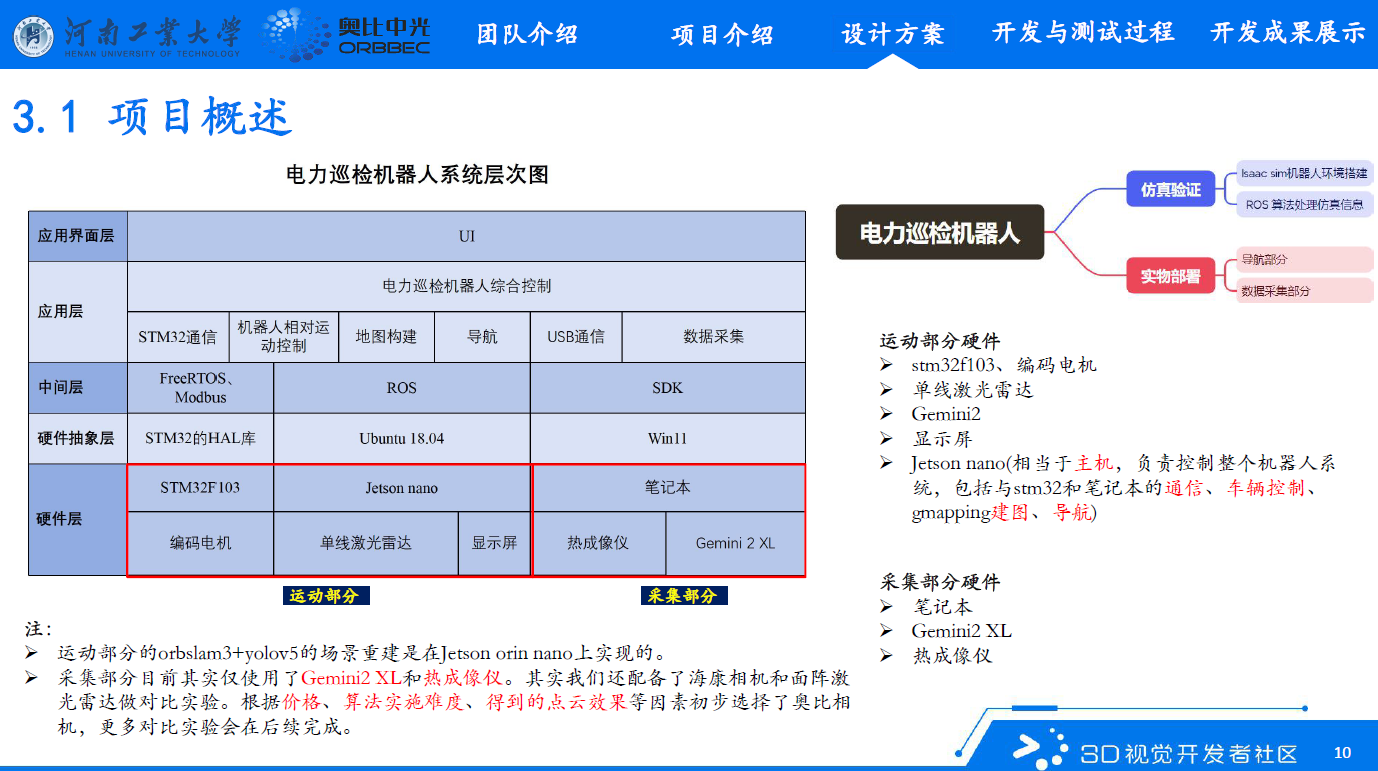
分层设计系统架构,清晰又合理
电力巡检机器人的系统采用了分层架构,从底层到上层分工特别明确。硬件层用的是 STM32F103、Jetson nano 这些设备,给整个系统打好基础;中间层靠 FreeRTOS、Modbus、ROS 这些技术,让硬件和软件能顺畅地 “交流合作”;应用层主要负责控制机器人巡检,还有展示相关信息的 UI 界面。这样的设计,以后要是想给系统增加新功能或者维护,都很方便。

数据采集与处理流程清晰
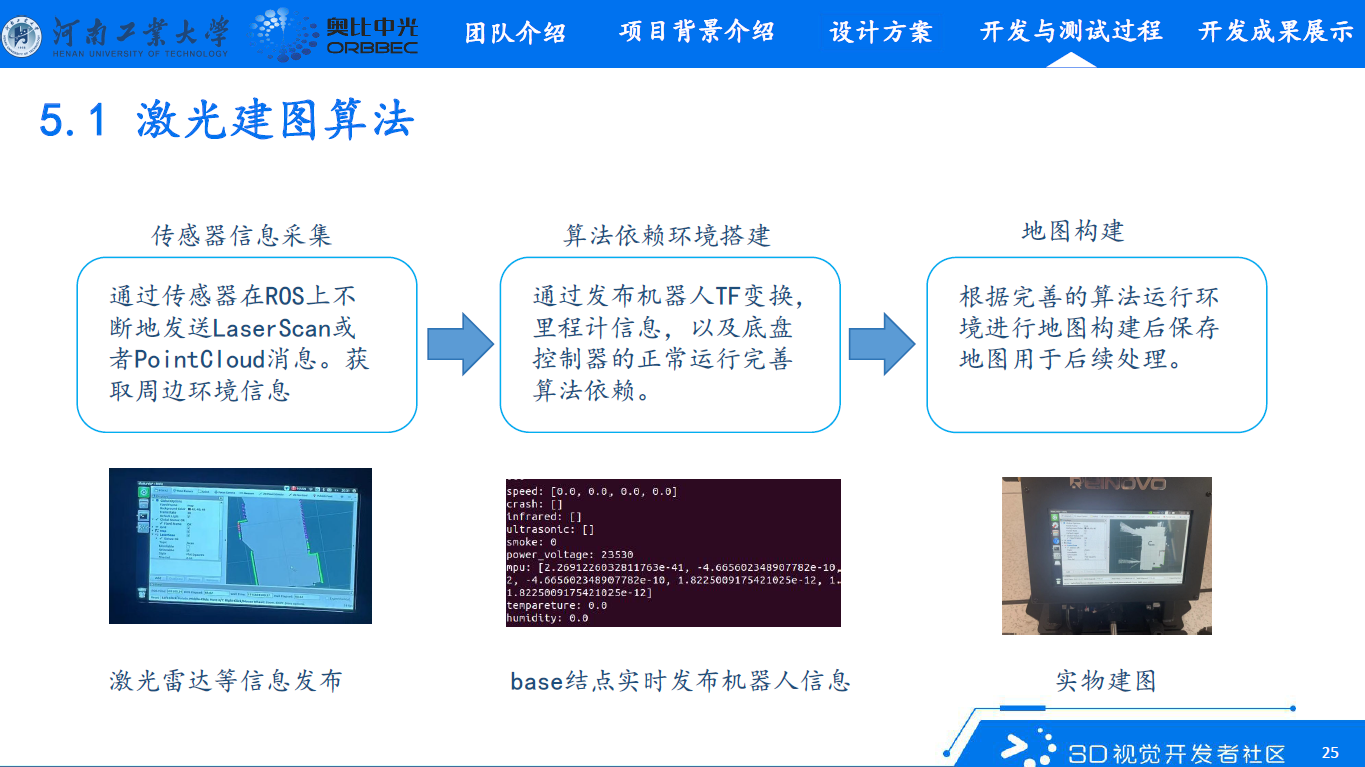
在激光建图算法中,传感器能够持续在 ROS 上发送 LaserScan 或 PointCloud 消息,高效获取周边环境信息。通过发布机器人 TF 变换、里程计信息,完善了算法依赖环境,为地图构建奠定了坚实基础。这种清晰的数据采集和处理流程,确保了地图构建的准确性和稳定性,是实现机器人自主导航的关键一步。
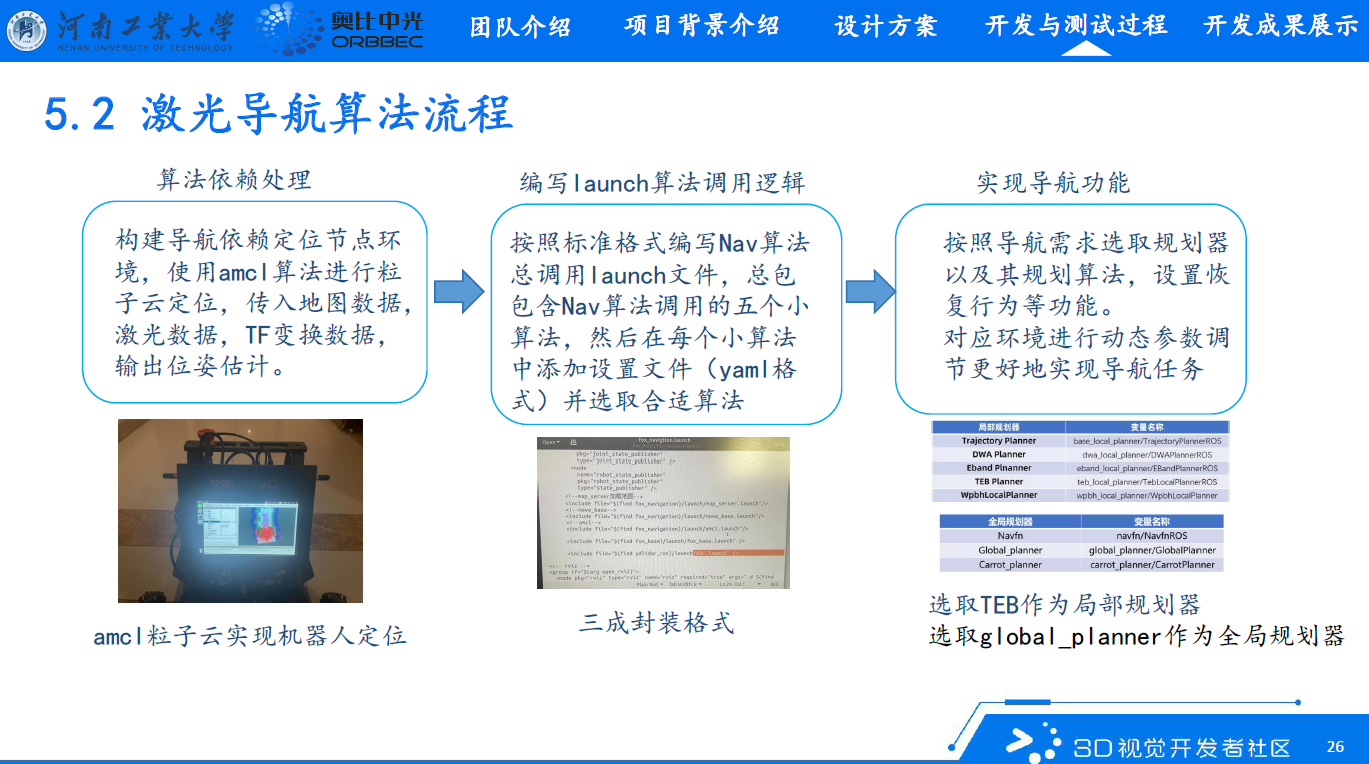
导航算法稳定可靠
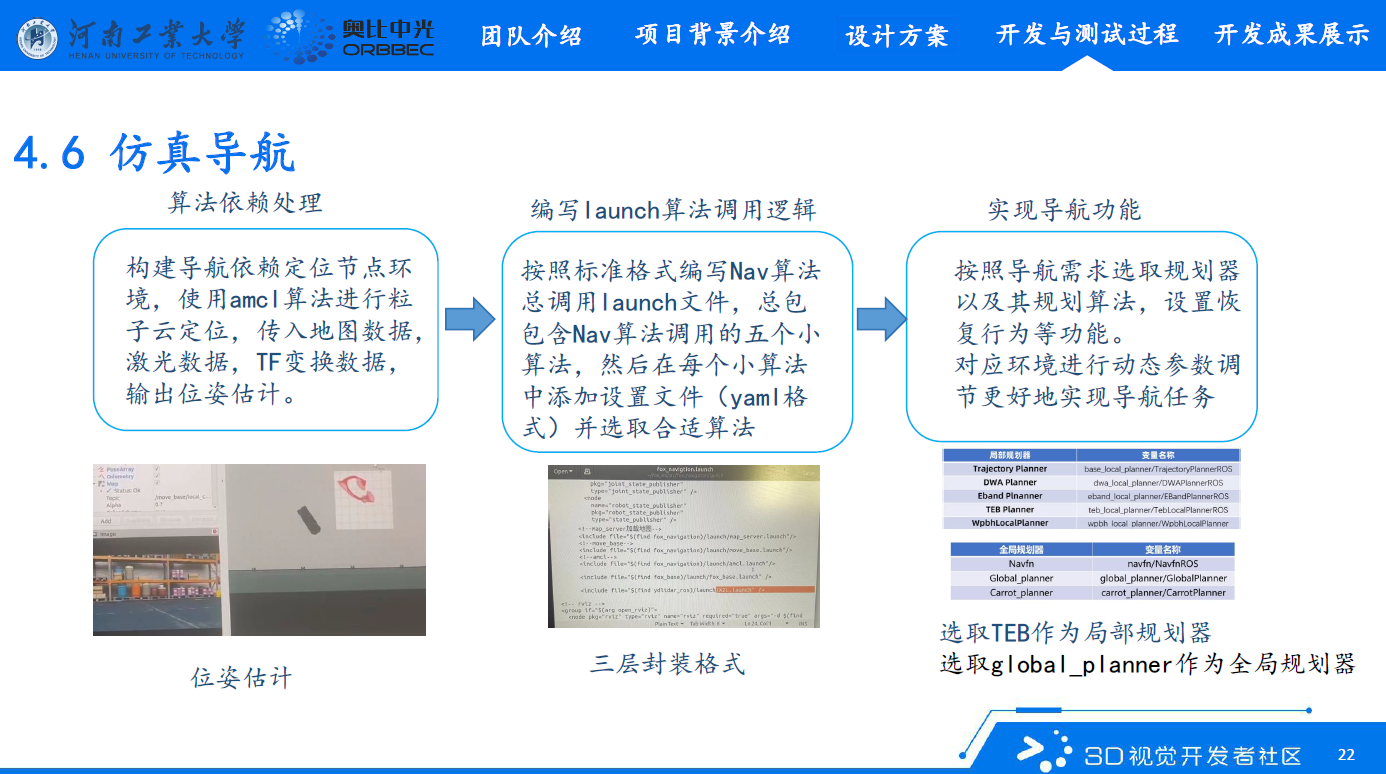
采用 amcl 算法进行粒子云定位,并选取 TEB 作为局部规划器、global_planner 作为全局规划器。在实际应用中,这些算法能够根据地图数据、激光数据和 TF 变换数据,输出较为准确的位姿估计,使机器人实现稳定的导航功能。通过设置恢复行为和动态参数调节,进一步增强了机器人在复杂环境中的适应性
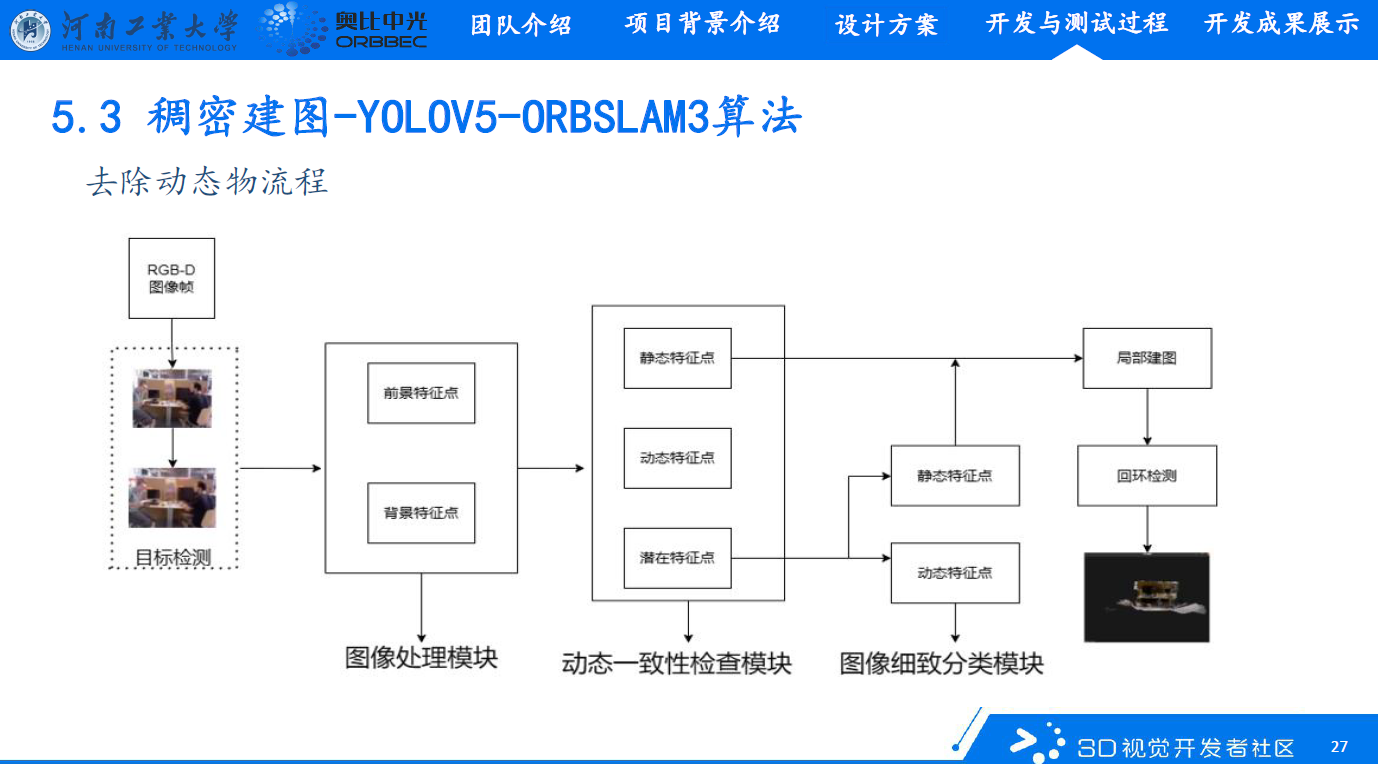
算法融合实现动态场景处理
YOLOV5 - ORBSLAM3 算法结合了目标检测和视觉 SLAM 技术。在处理复杂的电力巡检场景时,能够通过去除动态物流程,有效区分静态和动态特征点,进行局部建图和回环检测。
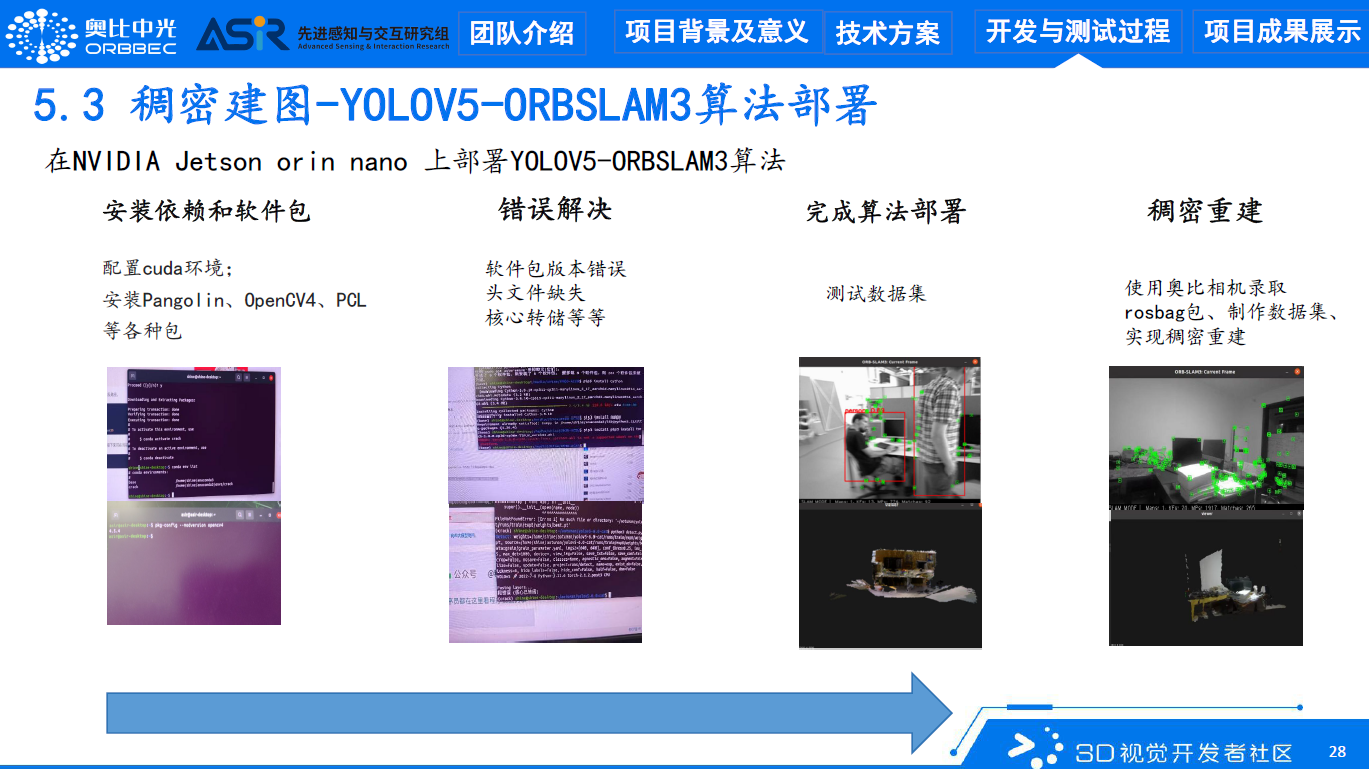
算法部署与优化成果显著:
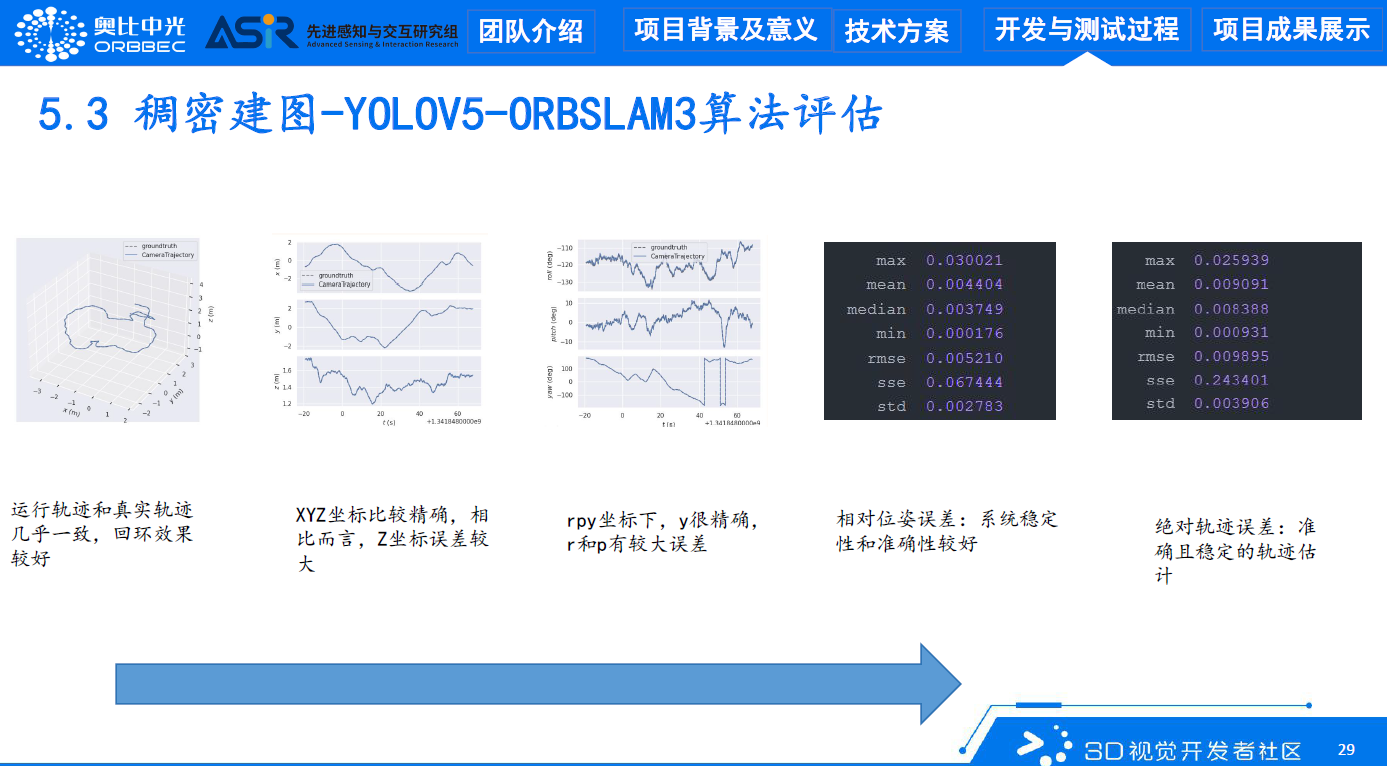
团队成功在 NVIDIA Jetson orin nano 上部署 YOLOV5 - ORBSLAM3 算法,尽管遇到软件包版本错误、头文件缺失等问题,但最终完成了算法部署并实现稠密重建。从算法评估结果来看,运行轨迹与真实轨迹接近,相对位姿误差和绝对轨迹误差都表现出较好的稳定性和准确性,证明了该算法在实际应用中的可行性和有效性。

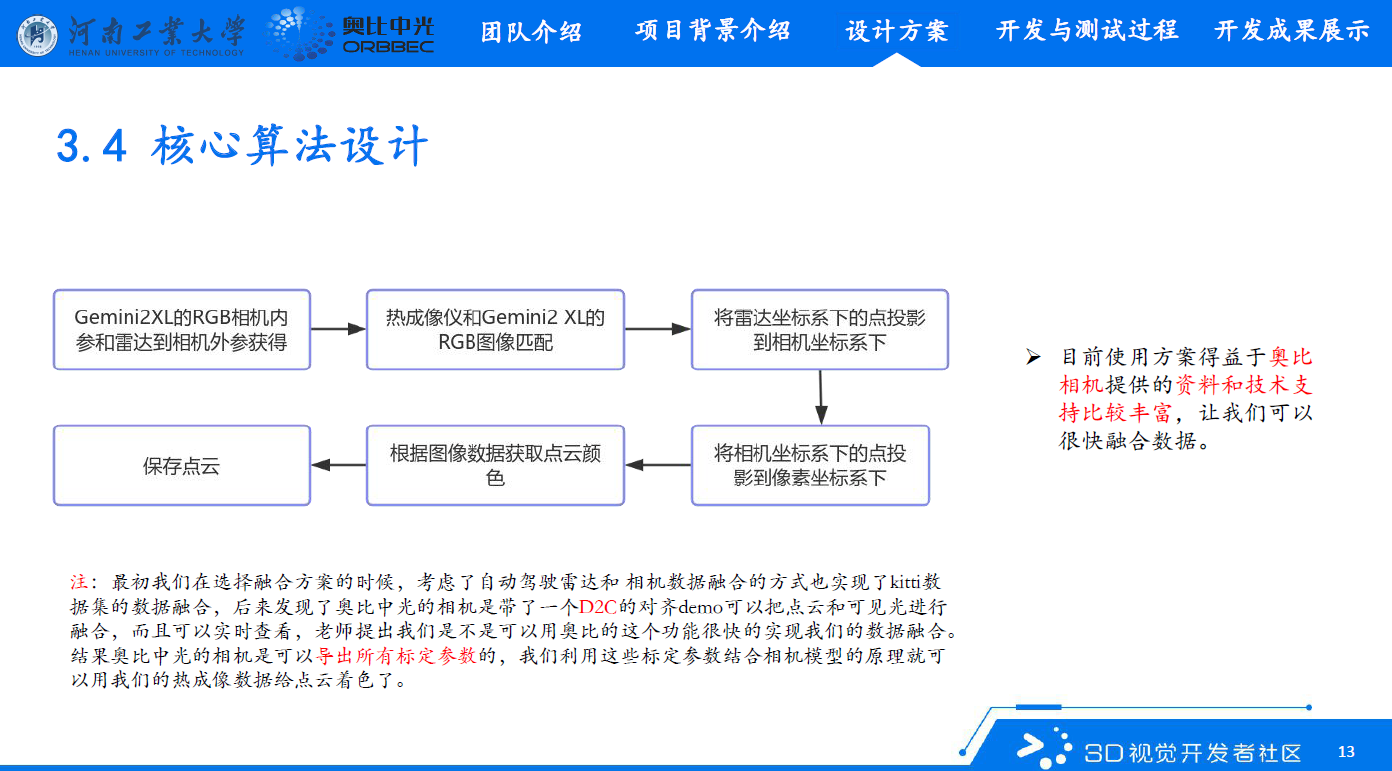
多源数据融合思路清晰
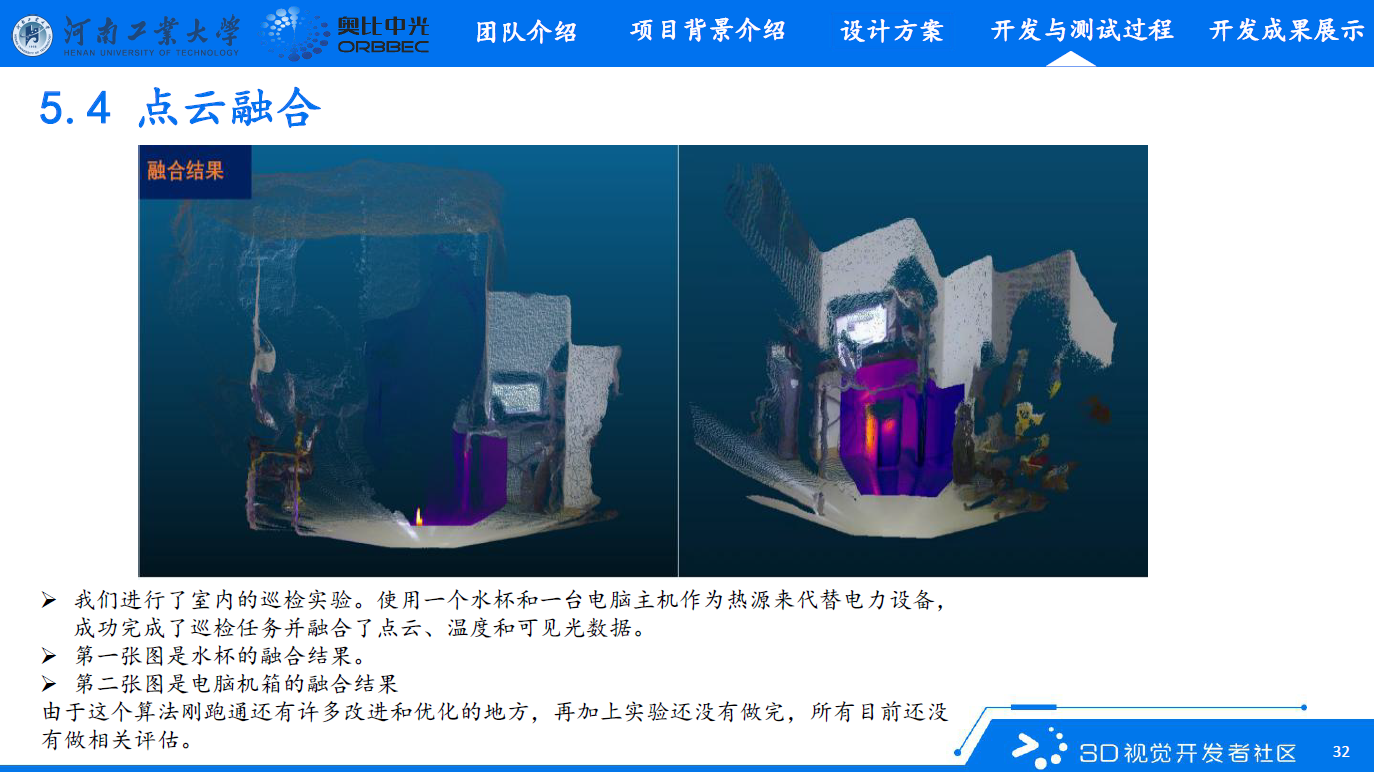
点云融合过程中,充分考虑了热成像仪、RGB 相机、雷达等多种设备的数据融合。通过读取相机内参、雷达到相机外参等多种参数,将不同坐标系下的点进行投影转换,最终实现点云与图像数据的融合,并根据图像数据获取点云颜色。这种全面的融合思路,能够充分利用各种传感器的优势,为电力设备的三维可视化和状态分析提供丰富的数据支持。
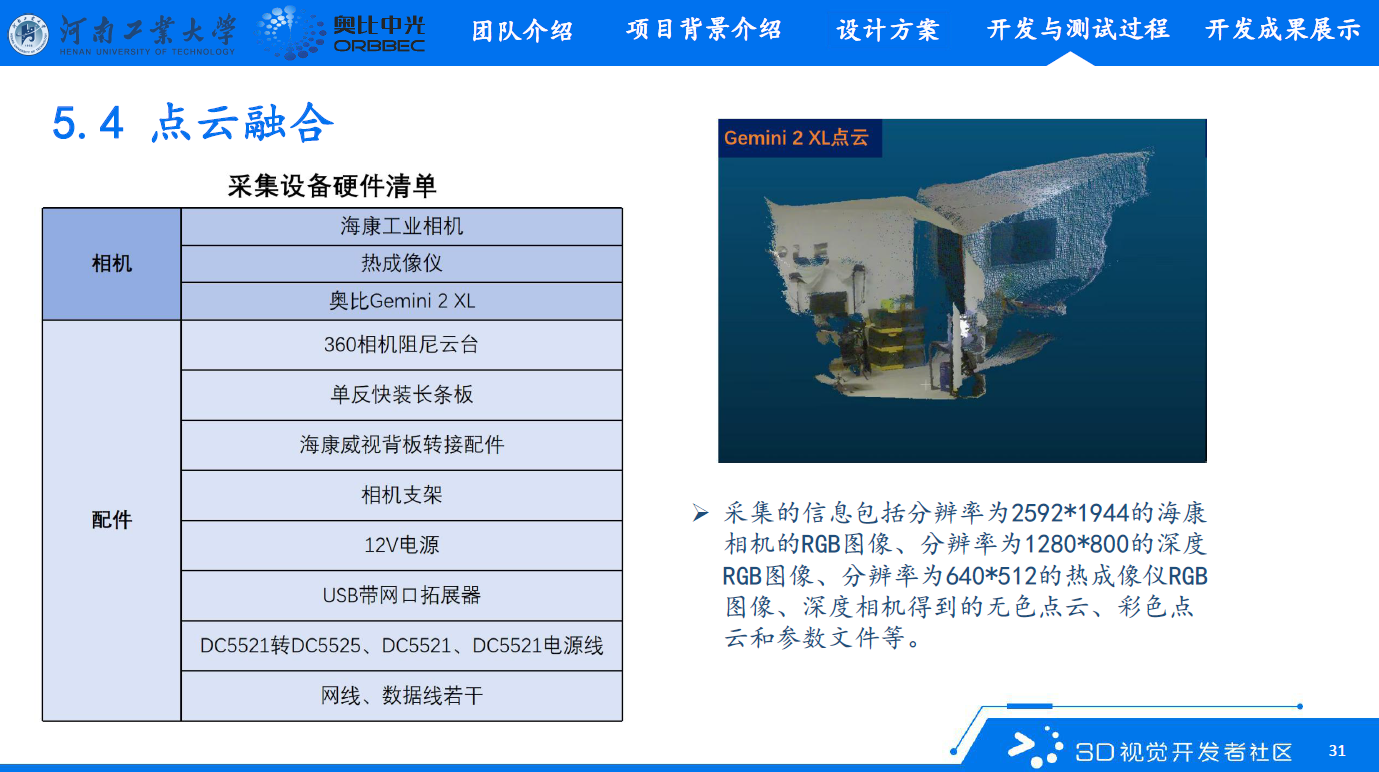
硬件设备选型与数据采集全面
在采集设备硬件选择上,不仅使用了 Gemini2 XL 和热成像仪,还配备了海康相机和面阵激光雷达进行对比实验,根据多种因素选择了合适的设备。采集的数据涵盖了不同分辨率的 RGB 图像、深度图像、热成像仪图像以及点云数据等,为点云融合和后续分析提供了充足的数据基础。
诸多提升的地方
在视觉信息应用方面,基于深度视觉的 Orbslam3 + yoloV5 算法虽已部署,但视觉信息在增强 SLAM 系统重定位功能上应用不足,且与激光雷达等其他传感器的融合方式未达最优,影响机器人自主导航与环境感知能力。特定功能实现上,三维点云反解温度功能未达成,无法深入评估电力设备状态,同时云端可视化信息缺失,降低了运维工作效率。边缘设备部署方面,因 Jeson nano Arm 架构算法部署困难和项目周期短,热值信息采集未部署到边缘设备,影响系统实时性与分布式处理能力,且目前对边缘设备与整体系统的协同性考虑不足,数据传输和任务分配等方面有待优化,以保障系统高效运行。
总体来说,河南工业大学的这个电力巡检机器人方案在技术创新和实际应用方面都做得不错,给电力巡检带来了新的解决办法。虽然现在还有一些不足,但这些问题也给团队后面的研究指明了方向。相信只要不断优化和完善,这个方案肯定能在电力行业发挥更大的作用,推动电力巡检技术向前发展。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









