







 博客介绍了ArcGIS 10.2中提供的13种坐标转换方法,包括地心偏移算法、布尔莎 - 沃尔夫七参数模型、格网算法、莫洛琴斯基模型等,还说明了各方法的参数数量及具体参数,如平移量、旋转角度、比例差等。
博客介绍了ArcGIS 10.2中提供的13种坐标转换方法,包括地心偏移算法、布尔莎 - 沃尔夫七参数模型、格网算法、莫洛琴斯基模型等,还说明了各方法的参数数量及具体参数,如平移量、旋转角度、比例差等。
在10.2里面,一共提供了12种转换的方法,如下:
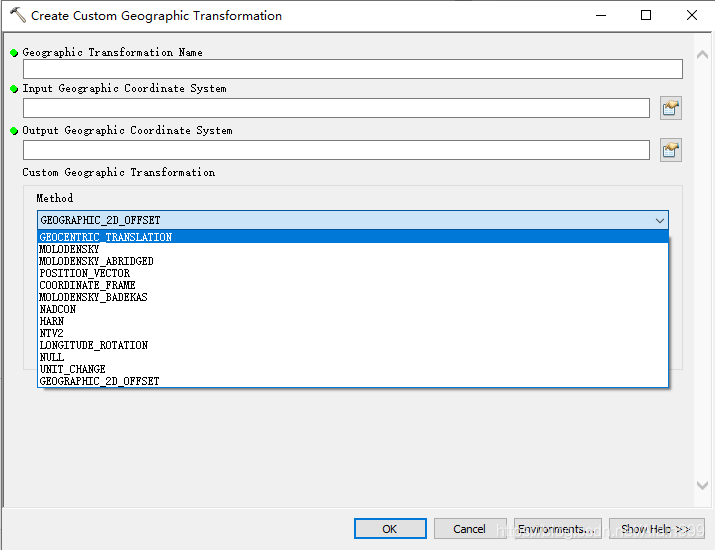
Geocentric_Translation
Molodensky
Molodensky_Abridged
Position_Vector
Coordinate_Frame
Molodensky_Badekas
NADCON
HARN
NTV2
Longitude_Rotation
Null
Unit_Change
Geographic_2D_Offset
下面对这13种方法进行简单介绍:
一、地心偏移算法(一种)
方法1
名称:Geocentric_Translation
说明:地心偏移的算法。 地心变换,也就是三参数计算出dx、dy、dz,平移1次就完成
参数数量:3参数
参数:
X_Axis_Translation(单位:米)
Y_Axis_Translation(单位:米)
Z_Axis_Translation(单位:米)
(注:参数名称有下划线,主要是方便在ArcGIS的python脚本中使用)
方法2:
名称:COORDINATE_FRAME
说明:布尔莎-沃尔夫七参数模型,旋转角度按顺时针定义,一般在美国使用
参数数量:7参数
参数:
X_Axis_Translation(单位:米)
Y_Axis_Translation(单位:米)
Z_Axis_Translation(单位:米)
X_Axis_Rotation(单位:度)
Y_Axis_Rotatio(单位:度)
Z_Axis_Rotation(单位:度)
Scale_Difference(单位ppm(百万分之(几),百万分率))
三、格网算法(四种)
方法1
方法名称:NADCON
方法说明:格网转换算法,是美国国家大地测量局用一种基于格网的变换方法,在NAD1927和NAD1983及其他地理坐标系统下做变换,彼此相临的州的精度可达0.15米
参数数量:1参数
参数:Dataset_conus
方法2 :
名称:LONGITUDE_ROTATION
说明:美国本土使用的一种格网变换方法
参数数量: 0参数
方法3
方法名称:NTV2
说明:加拿大采用的同NADCON类似的基于格网的方法, 采用了双线性内插的方法来计算点的坐标
参数数量:1参数
参数:Dataset_canada/Ntv2_0
方法4
方法名称:HARN(High Accuracy Reference Network)
说明:美国在更新了测量控制网后,推出了这种格网,其精度可达0.05米
参数数量:1参数
参数:Dataset_alhpgn
四、莫洛琴斯基模型(三种)
方法1
方法名称:MoloDensky
说明:莫洛琴斯基地球模型,是利用垂线偏差计算大地水准面的一种模型,由前苏联地球物理学家、测量学家莫洛琴斯基提出
参数数量:3参数
参数:
X_Axis_Translation(单位:米)
Y_Axis_Translation(单位:米)
Z_Axis_Translation(单位:米)
方法2
方法名称:MoloDensky_Abridged
说明:简化莫洛琴斯基公式计算,用的也是莫洛琴斯基模型,但是简化后,比MoloDensky算法精度稍低
参数数量:3参数
参数:
X_Axis_Translation(单位:米)
Y_Axis_Translation(单位:米)
Z_Axis_Translation(单位:米)
方法3
方法名称:MoloDensky_Badekas
说明:扩展莫洛琴斯基算法,在MoloDensky算法的基础上增加了三个起始坐标,也是ArcGIS所有转换方法中参数最多的。
参数数量:10参数
参数:
X_Axis_Translation(单位:米)
Y_Axis_Translation(单位:米)
Z_Axis_Translation(单位:米)
X_Axis_Rotation(单位:度)
Y_Axis_Rotatio(单位:度)
Z_Axis_Rotation(单位:度)
Scale_Difference(单位ppm(百万分之(几),百万分率))
X_Coordinate_of_Rotation_Origin(单位:秒)
Y_Coordinate_of_Rotation_Origin(单位:秒)
Z_Coordinate_of_Rotation_Origin (单位:秒)
五、单位数据转换
方法1:
方法名称:Unit_Change
说明:单纯的数据单位变换,不涉及平移信息
参数数量:0参数
方法2::
方法名称:Geographic_2D_Offset
方法说明:坐标补偿,单纯的坐标数据变换
参数数量:2参数
参数:
Longitude_Offset (单位:秒)
Latitude_Offset (单位:秒)六:其他方法(10.2之后才有的一个选项)
方法名称:Null
说明:不使用任何参数进行转换

















 8959
8959

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









