






安装OpenEulerServer
1:安装虚拟机....(略)
2:打开创建好的虚拟机。
等待安装完成。
3:进入到此界面:
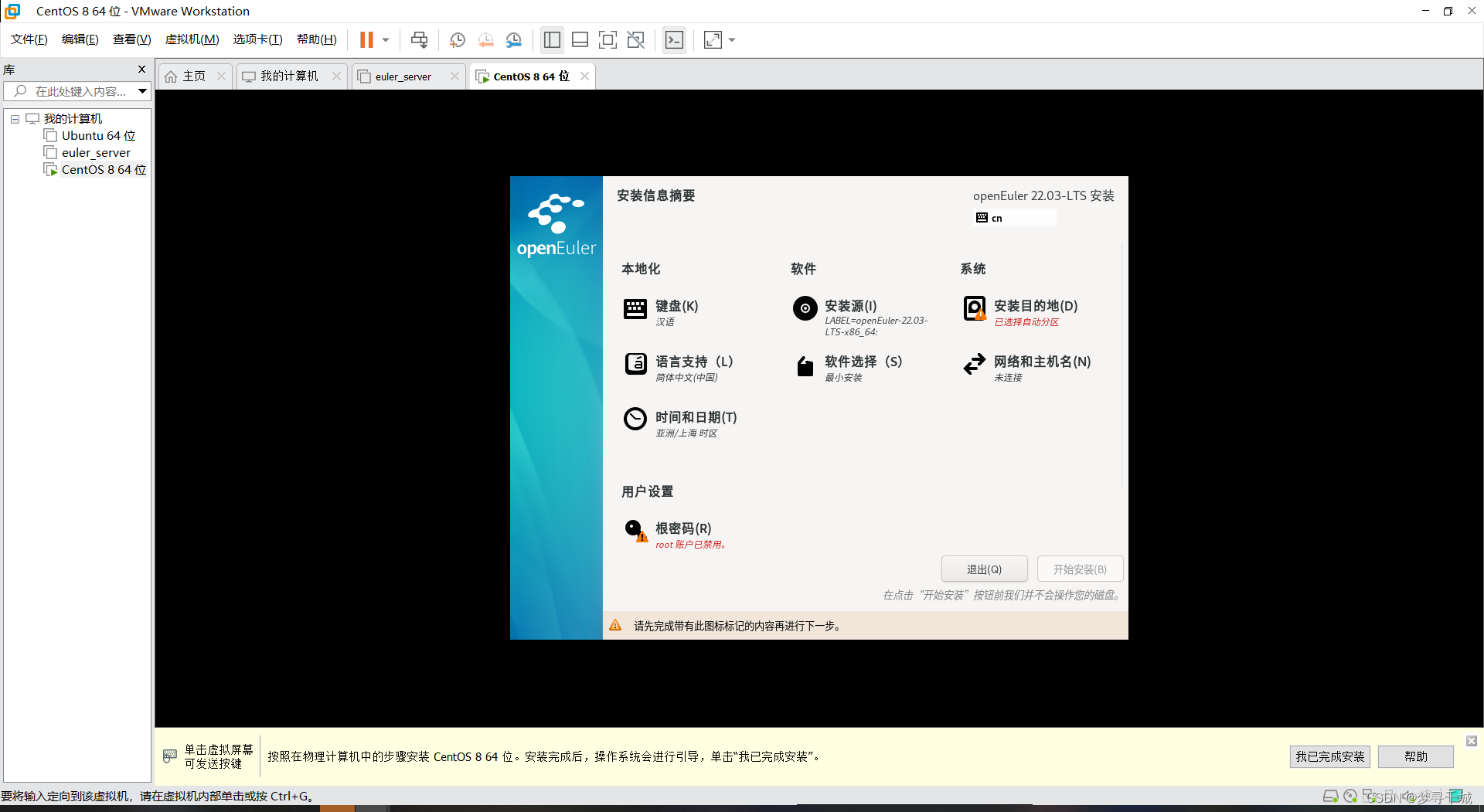
安装目的地点进去退出来即可。
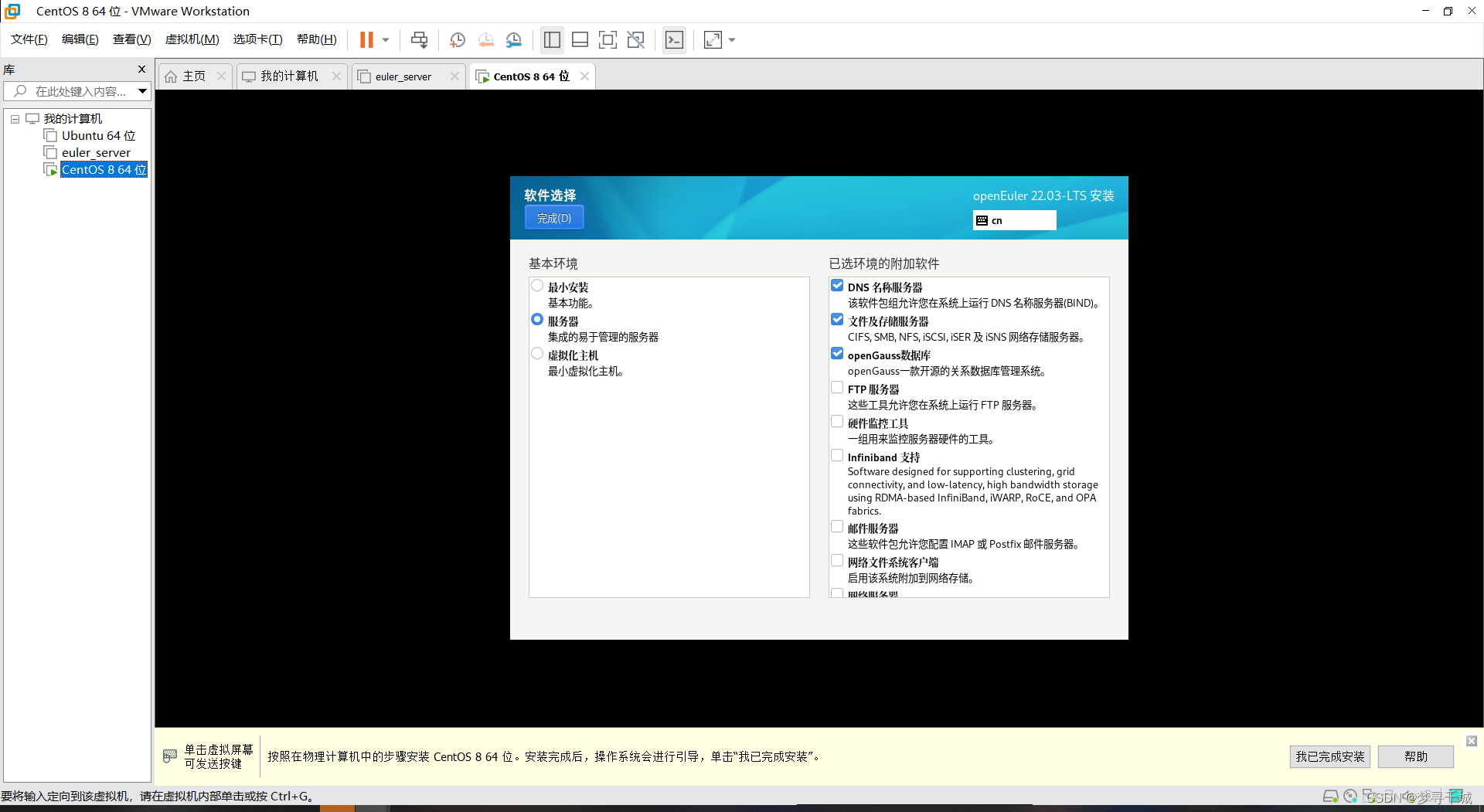
软件选择服务器(右边内容应该可以不选择):
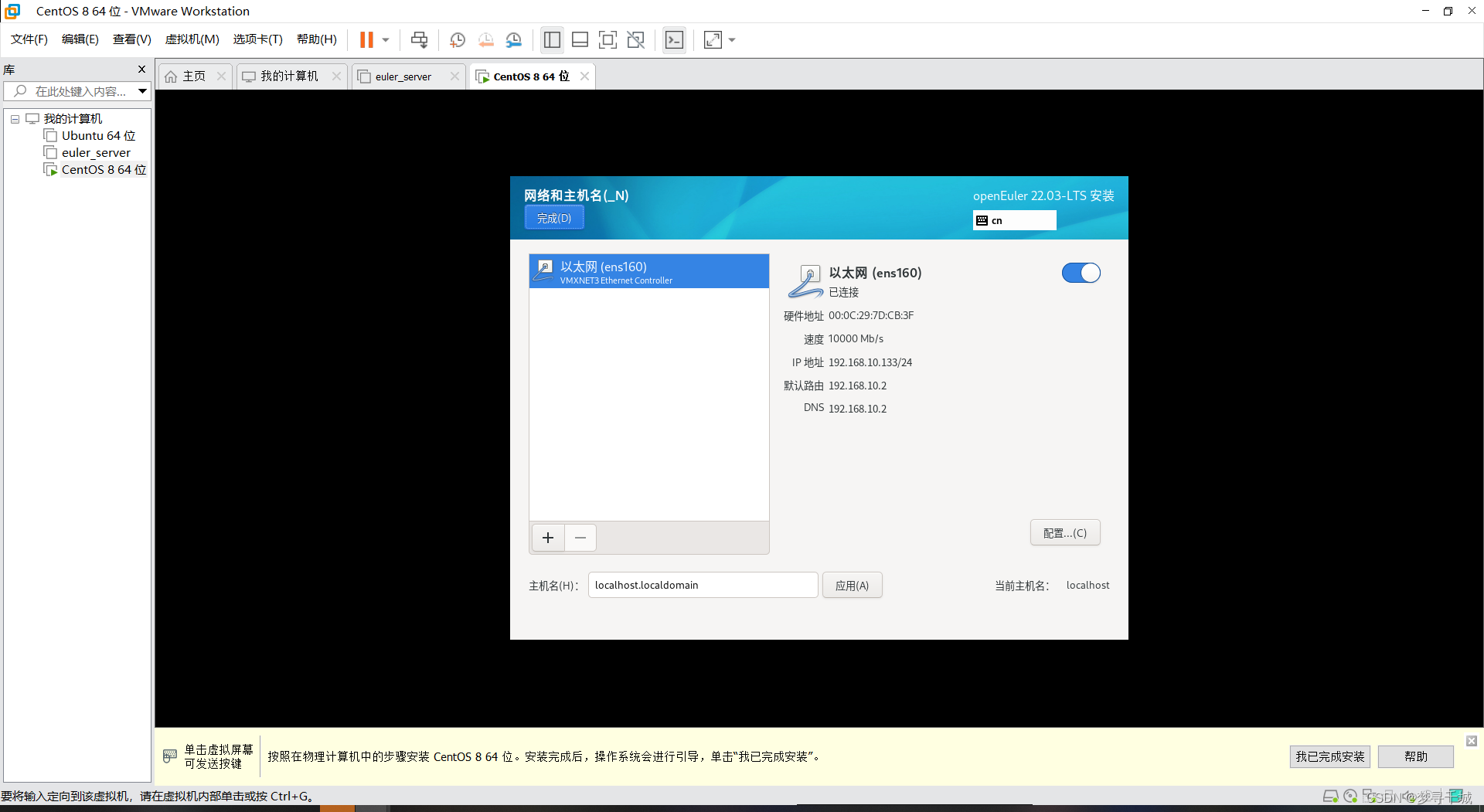
网络和主机名打开右上角按钮即可:
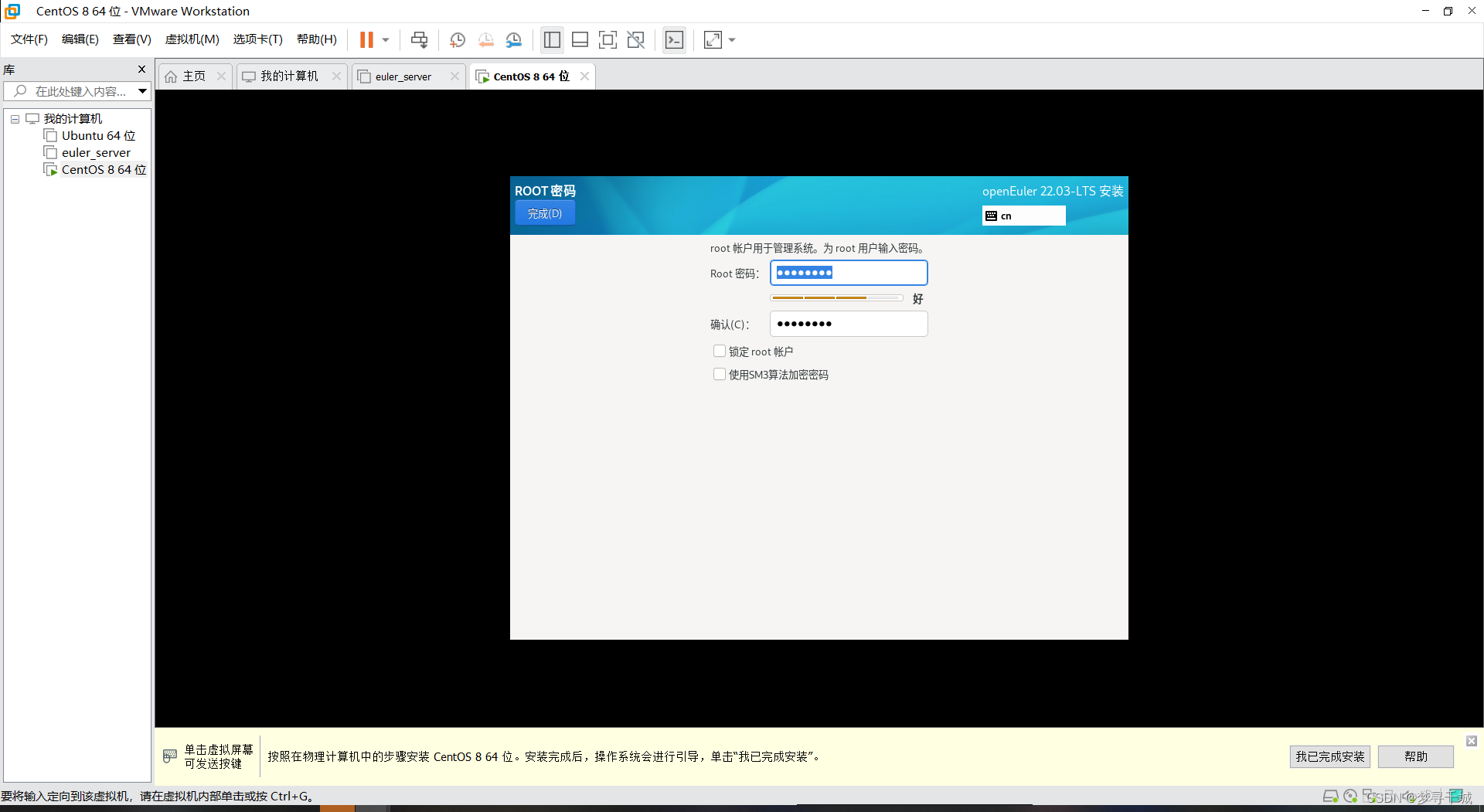
设置密码:
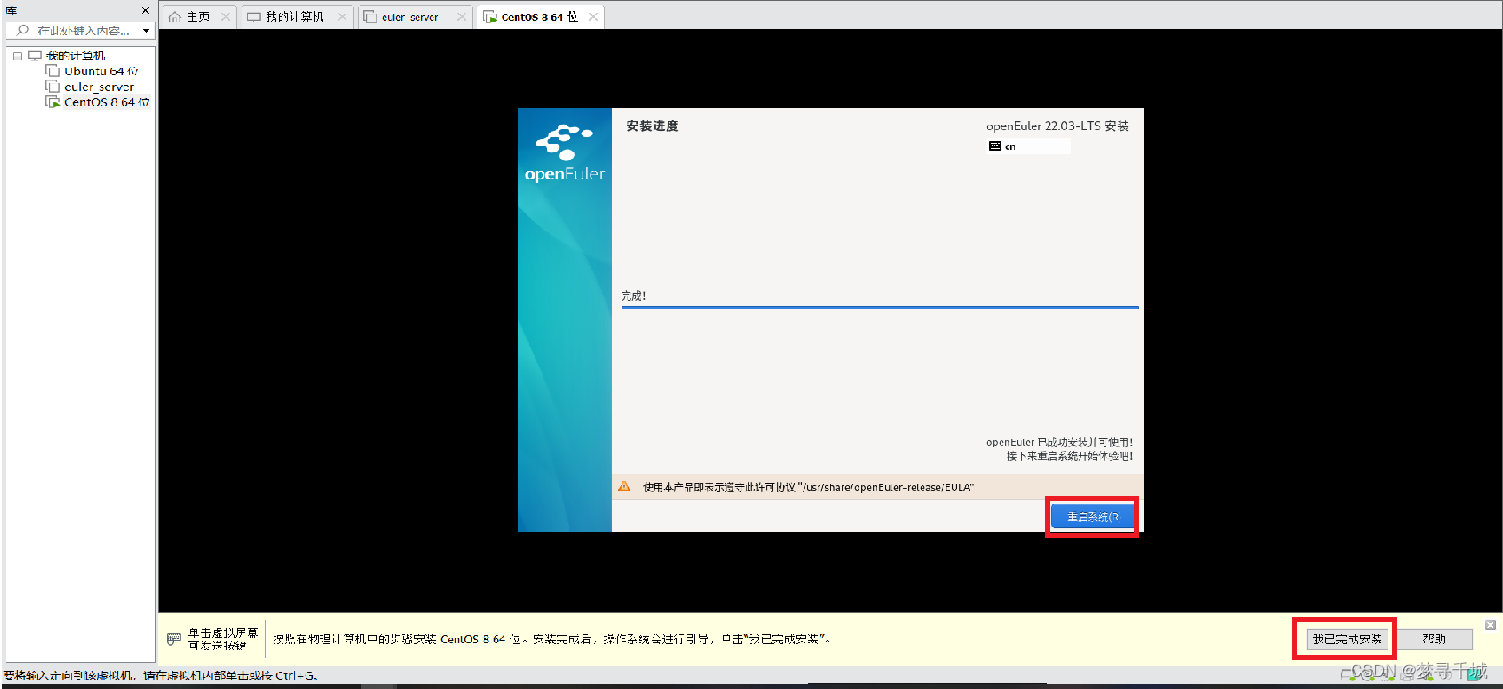
点击开始安装,等待安装完成。
点击 我已完成安装。
点击 重启系统。
备份
重启后进入此界面:
点击此处新建快照放置后面操作失误,名称和说明自定义,后面进行完各个重要步骤后,记得拍摄快照:

连接Xshell
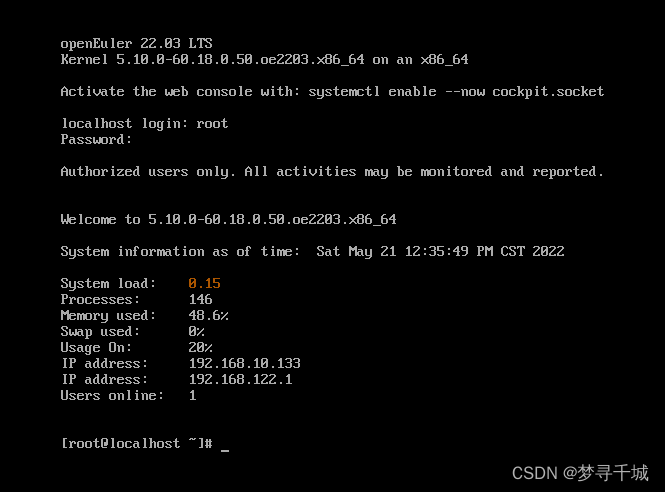
登录euler:
打开Xshell,点击新建:
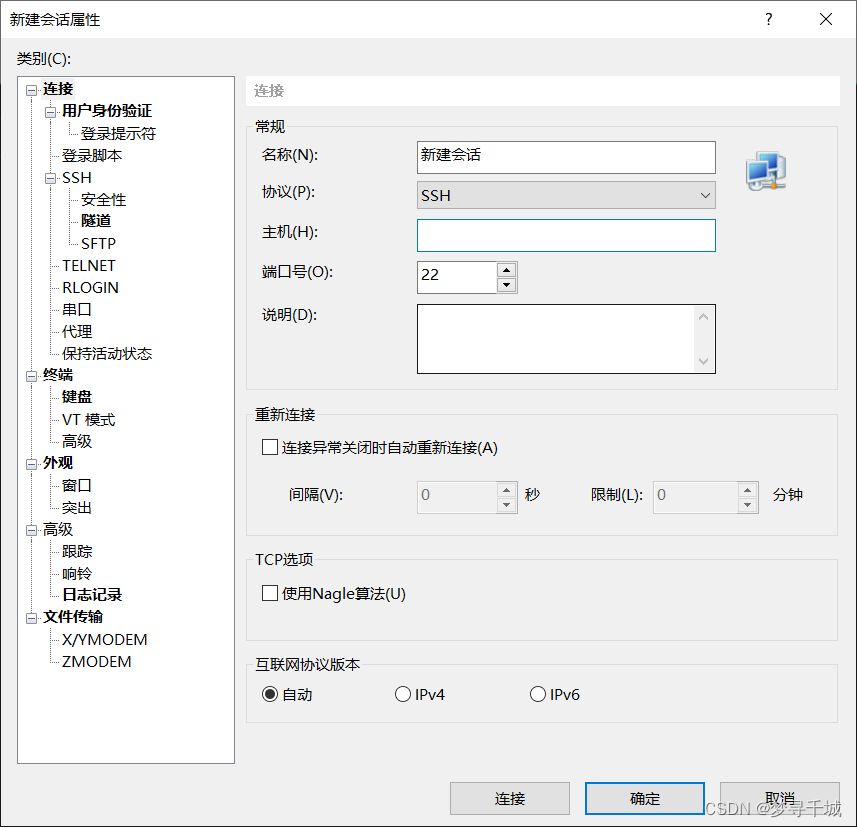
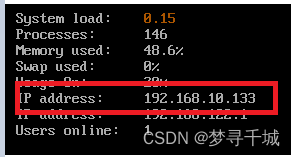
在主机处输入ip地址,即为eu的这个地址:
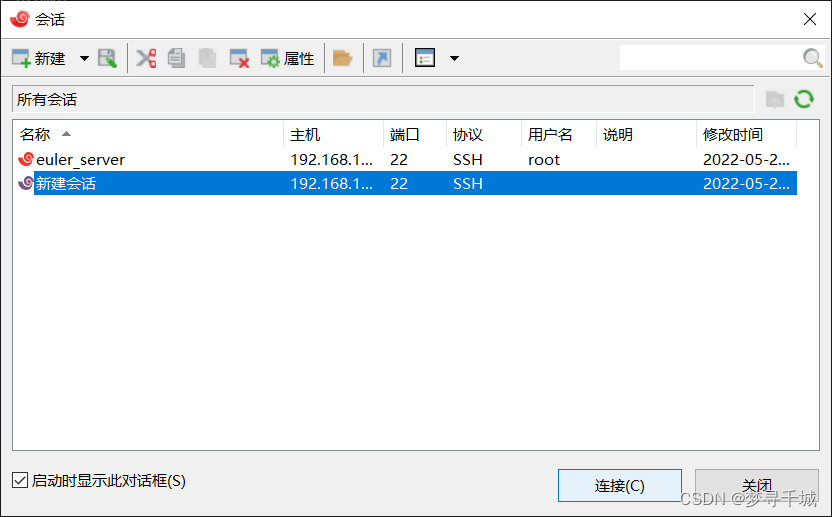
点击确定;点击连接:
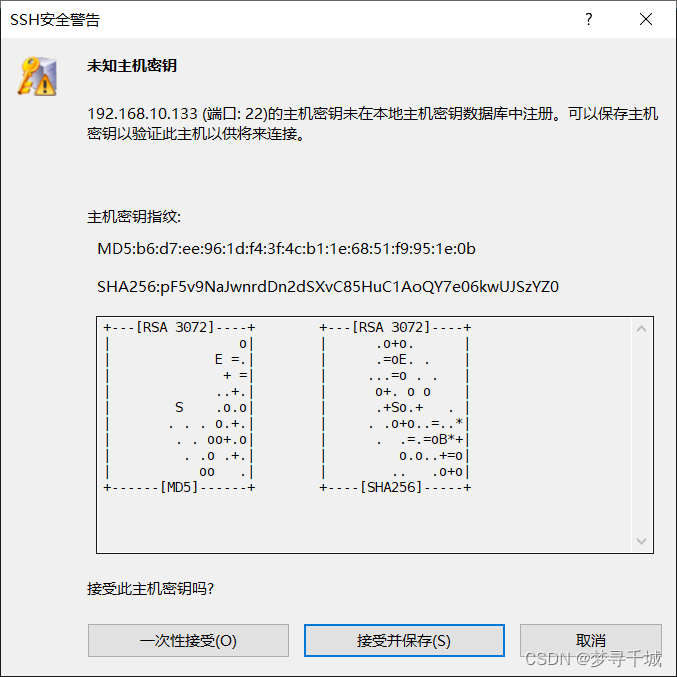
点击接受并保存:
输入账号密码,进入此界面,代表连接成功:
挂载光盘
Xshell 快捷键
复制:Ctrl+Insert 粘贴:ShIft+Insert
输入:
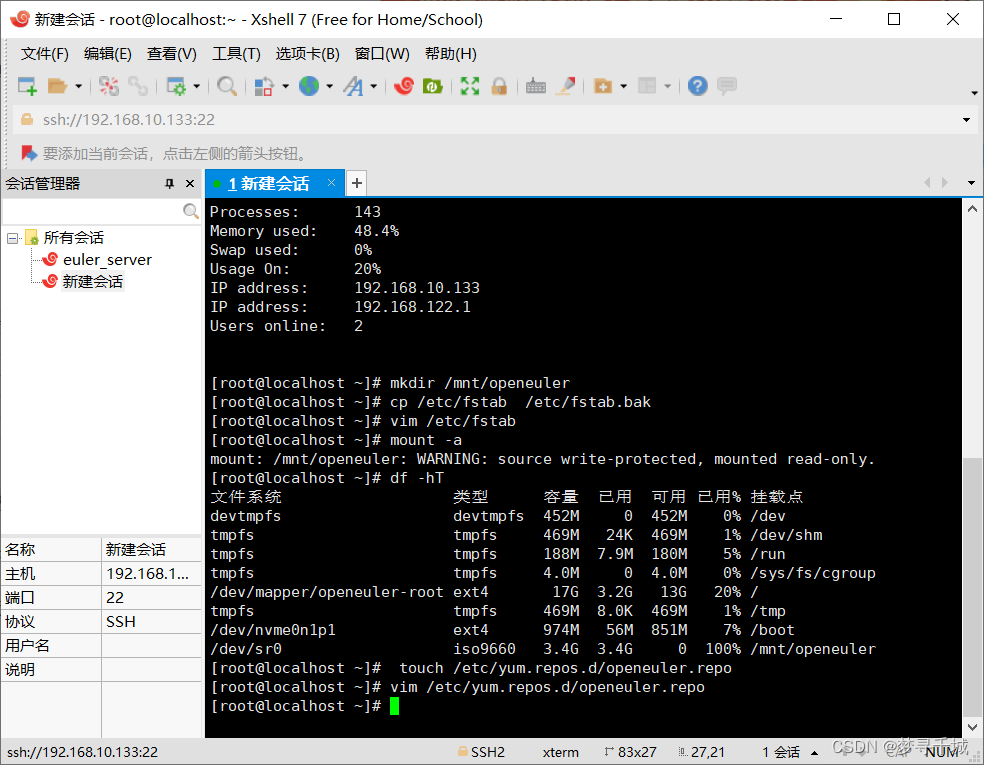
# mkdir /mnt/openeuler
按下enter
输入
# cp /etc/fstab /etc/fstab.bak
输入
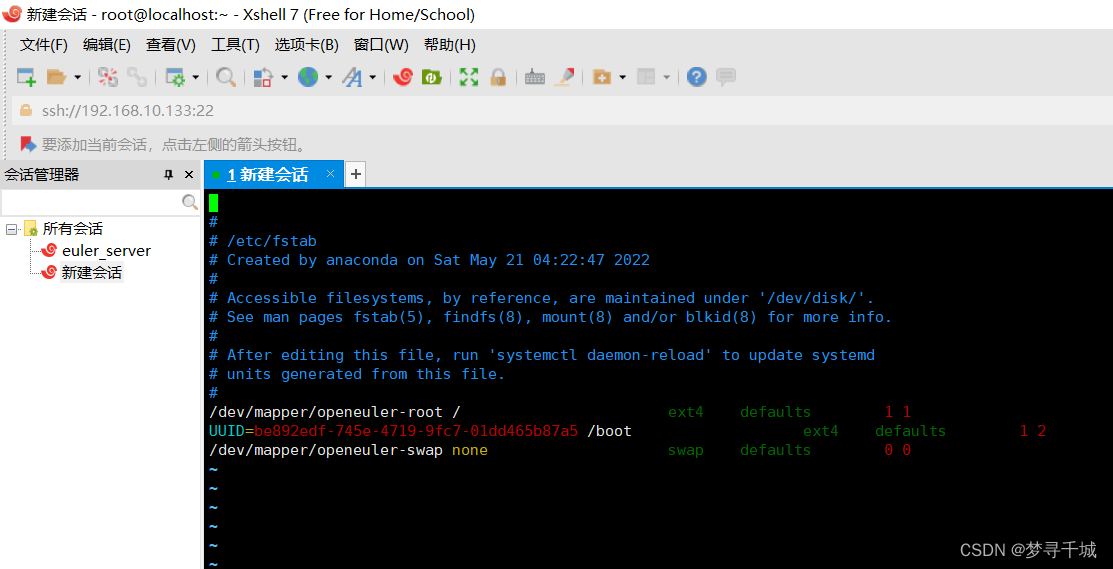
# vim /etc/fstab
如下图:

进入下图所示界面
按下G 定位到文件的最后一行 按下o健在当前文件的最后一行新增一行,若无反应,使用方向键将光标移到最后一行,按下O键新增一行。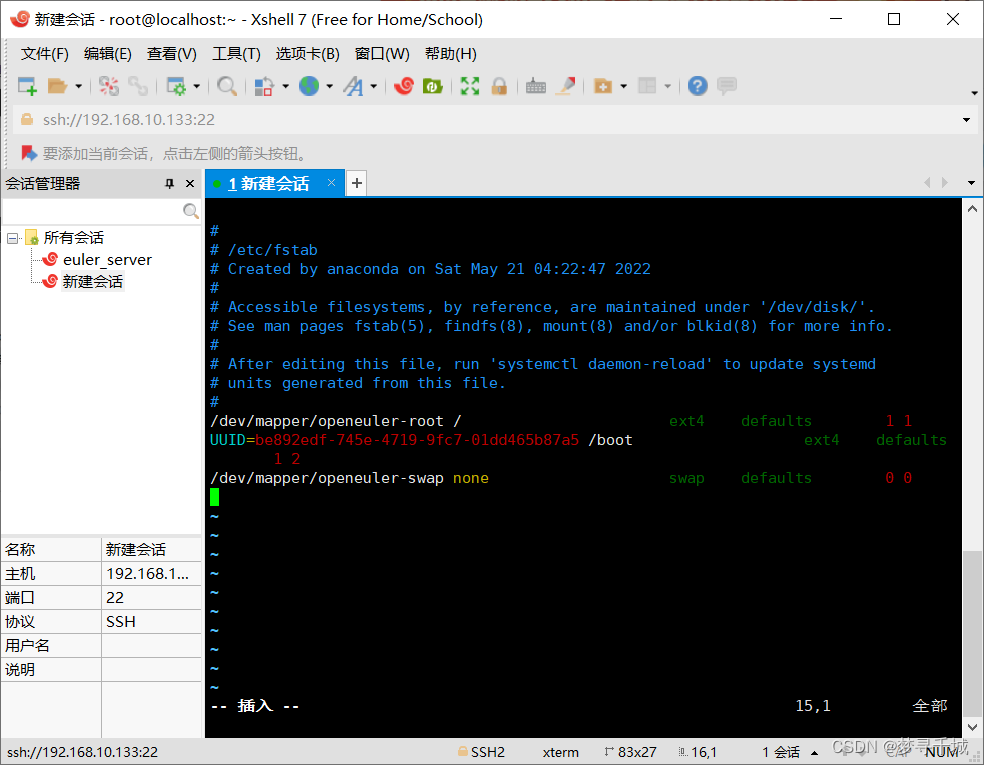
输入
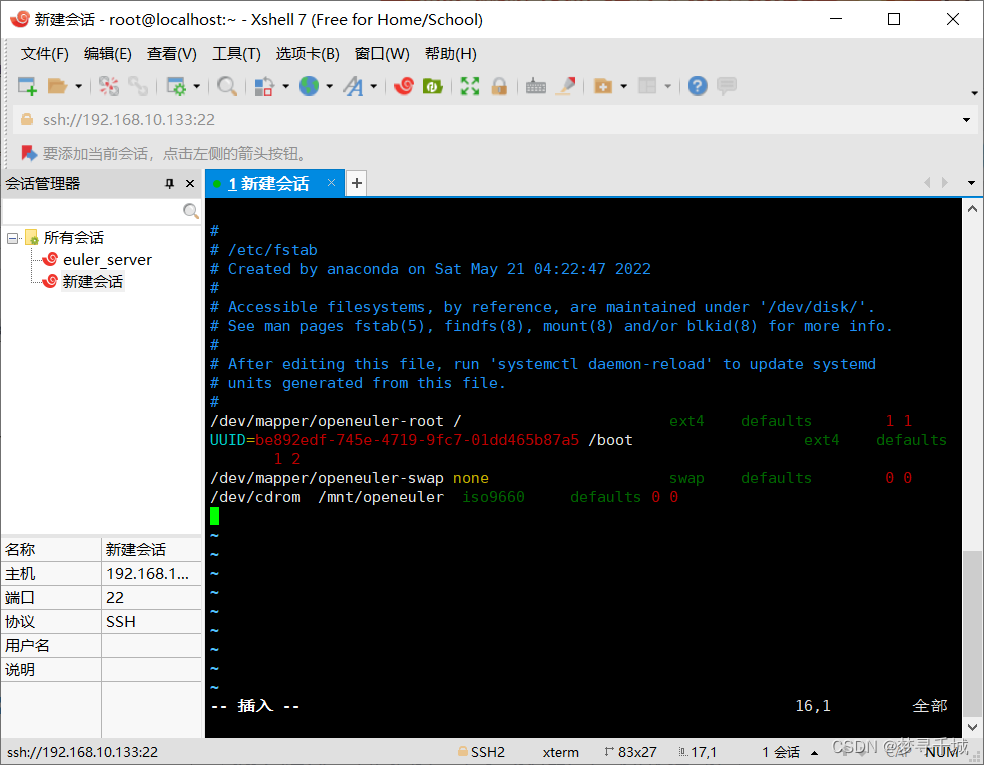
/dev/cdrom /mnt/openeuler iso9660 defaults 0 0
按下enter:
按一次esc,输入
:wq
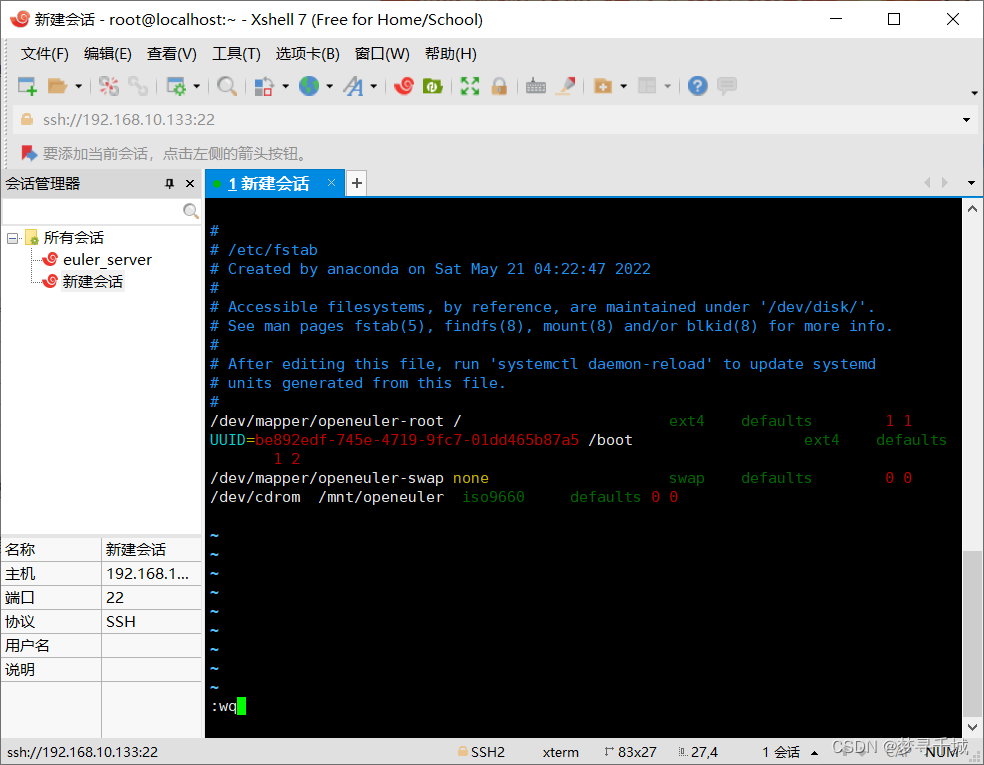
按下enter
回到外部界面。
输入
mount -a
可能会弹出警告:
![]()
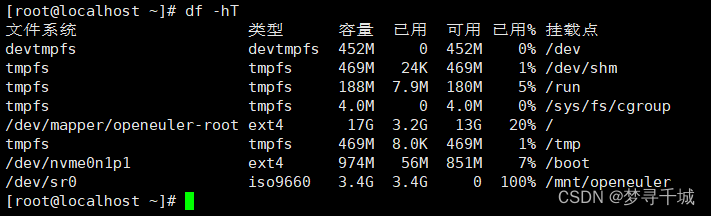
输入
df -hT
在最下面出现iso9660即为成功:
创建软件仓库
输入
touch /etc/yum.repos.d/openeuler.repo
输入
vim /etc/yum.repos.d/openeuler.repo
进入下面界面:
按下i进入编辑模式
输入下列内容:
[openEuler]
name=Huawei Open Euler OS
baseurl=file:///mnt/openeuler
enabled=1
gpgcheck=0
如图:
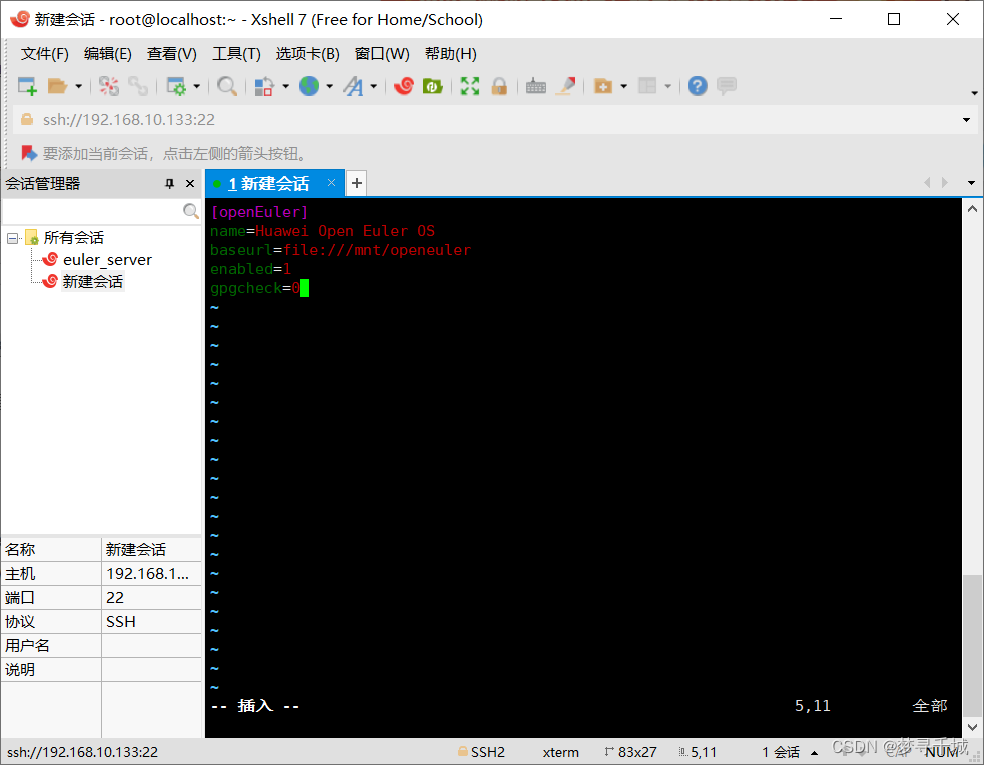
按一下esc,推出编辑模式:
输入(冒号必须输入):
:wq
回到外部界面:
输入:
yum clean all

输入:
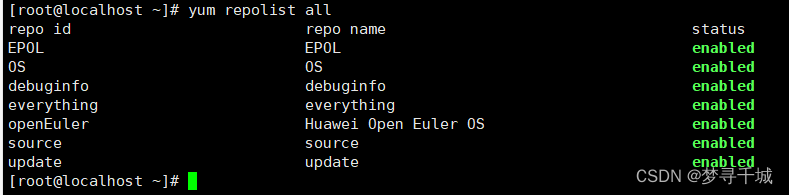
yum repolist all
应该出现openEuler就算成功?:
输入:
yum makecache

成功。

















 1532
1532

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









