







本篇思维导图
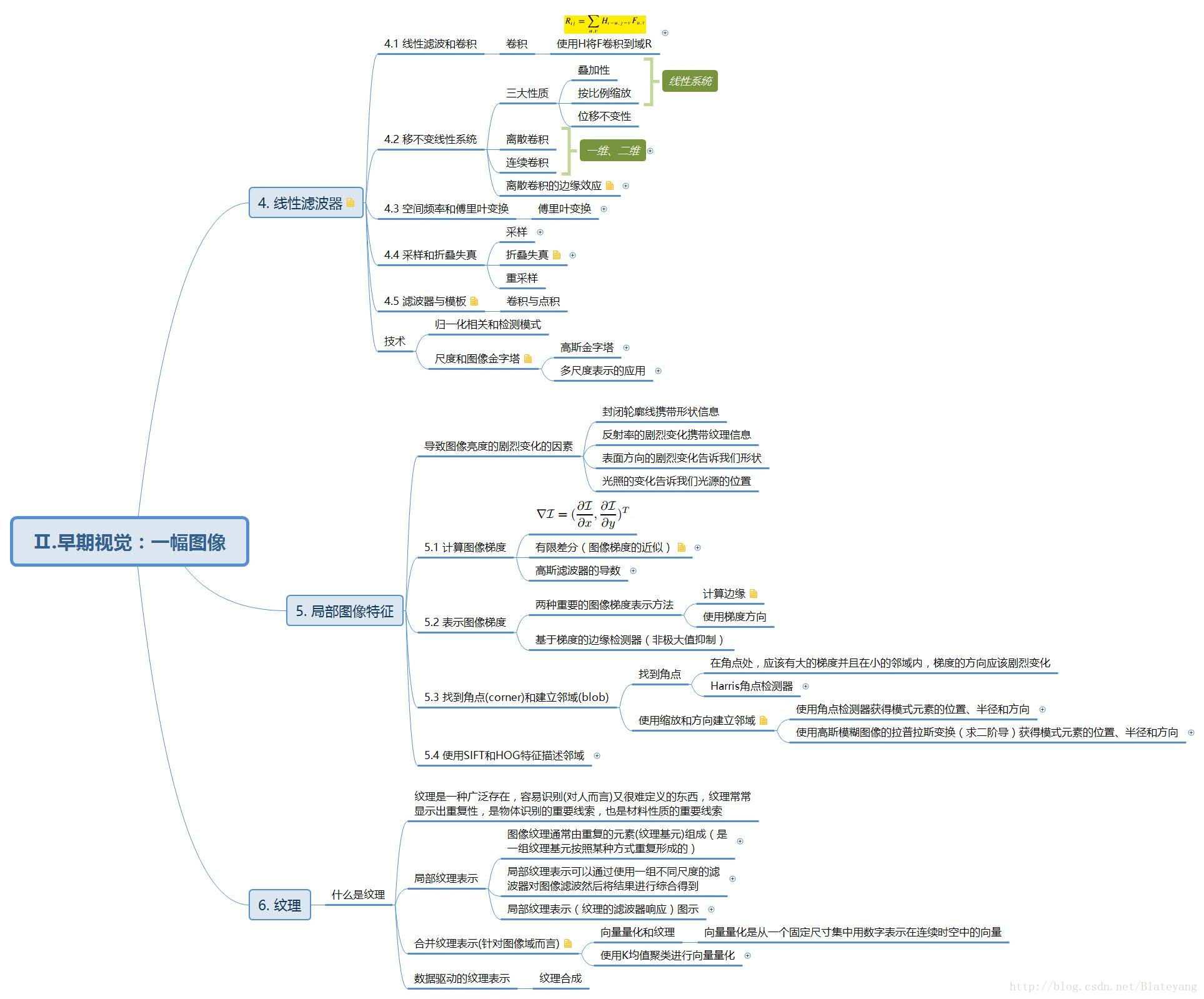
线性滤波器
线性滤波器的主要策略是用不同的加权模式计算像素加权和,以寻找不同的图像模式
1.线性滤波和卷积
- 二维卷积公式:
Rij=∑u,vHi−u,j−vFu,v,使用卷积核H将图像F卷积到域R
- 几种常见的线性滤波:平均平滑、高斯平滑、导数和有限差分
2.移不变线性系统
2.1 三大性质
- 叠加性
- 按比例缩放
- 位移不变性
2.2 离散卷积和连续卷积的性质
- 对称的: (g∗h)(x)=(h∗g)(x)
- 可结合的: (f∗(g∗h))=((f∗g)∗h)
2.3 离散卷积的边缘效应
在边缘处计算有些像素位置的卷积值时,需要虚拟并不存在的图像值,采用的策略有
- 忽略这些点
- 使用常数填充
- 使用其他方法填充图像
3 空间频率和傅里叶变换
二维傅里叶变换:

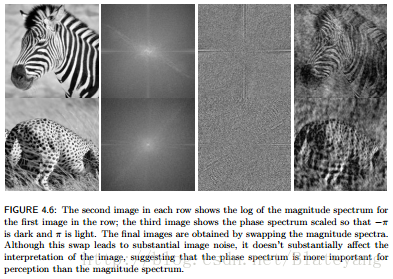
效果图:
4.采样和折叠失真
- 采样
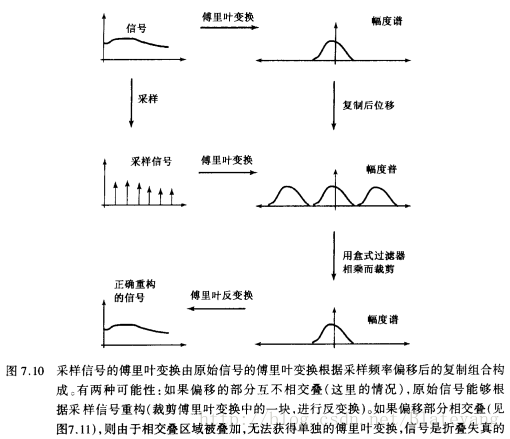
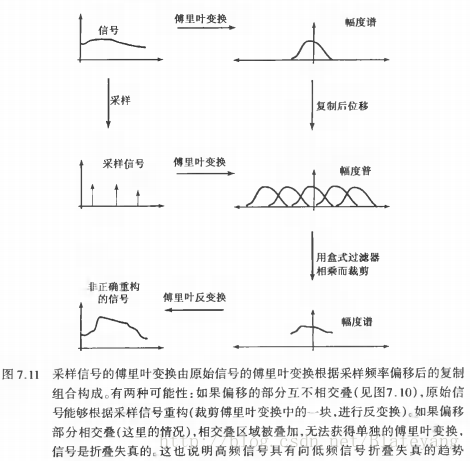
- 折叠失真
原始信号中的高频空间元素在采样信号中会表现为低频元素,这种效应称为折叠失真
- 重采样
5.滤波器与模板
滤波器对类似滤波器的模式元素有很强的响应
6.技术
6.1 归一化相关和检测
6.2 尺度和图像金字塔
图像金字塔是以金字塔形状排列的分辨率逐步降低,且来源于同一张原始图的图像集合
- 高斯金字塔
在高斯金字塔中,每一层使用一个对称的高斯核进行平滑,同时进行重采样以获得下一层 - 多尺度表示
*多尺度搜索:小图像模式
*空间搜索:在两张图片中找到对应点,由粗到精的匹配
*特征跟踪:跟踪特征到较粗糙尺度,接收在较粗糙尺度下能找到对应的精细尺度特征
局部图像特征
导致图像亮度剧烈变化的因素:
- 封闭轮廓线携带形状信息
- 反射率的剧烈变化携带纹理信息
- 表面方向的剧烈变化也告诉我们形状
- 光照的变化告诉我们光源的位置
1 计算图像梯度
∇I=(∂I∂x,∂I∂y)T
- 有限差分(图像梯度的近似)
注:简单的有限差分往往会对噪声有较强的相应,解决的方法是先平滑图像再对它进行差分(可在像素尺度上抑制噪声) - 高斯滤波器的导数
∂(Gσ∗∗I)∂x=(∂Gσ∂x)∗∗I

2 表示图像梯度
- 两种重要的图像梯度表示方法:计算边缘、使用梯度方向
- 基于梯度的边缘检测器
3 找到角点(corner)和建立邻域(blob)
3.1 找到角点
在角点处,应该有大的梯度并且在小的邻域内,梯度的方向应该剧烈变化
Harris角点检测器
- 原理:在角点窗口,图像高斯平滑后的二阶导数矩阵H的两个特征值都比较大
- 公式:寻找下式的局部极大值
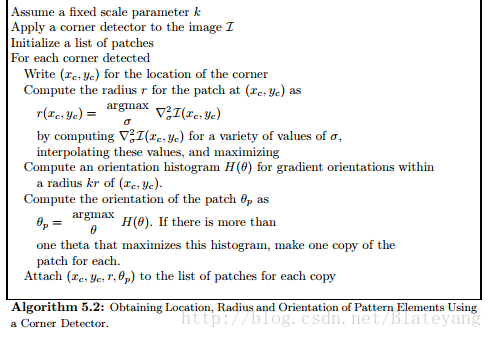
det(H)−k(trace(H)2)2,k是一个固定的尺度参数 - 特点:检测器不受平移和旋转影响
3.2 通过缩放和方向建立邻域
使用角点检测器获得模式元素的位置、半径和方向
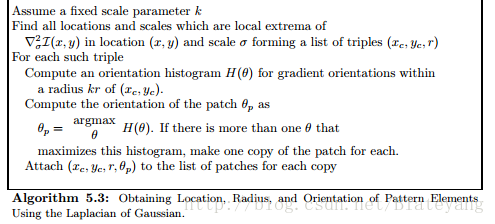
使用高斯模糊图像的拉普拉斯变换(求二阶导)获得模式元素的位置、半径和方向
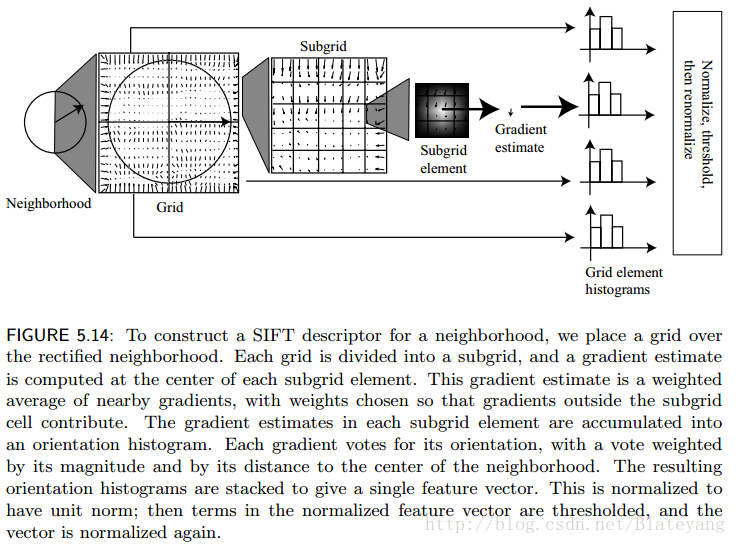
4 使用SIFT和HoG特征描述邻域
SIFT(Scale Invariant Feature Transform)特征(是经典的尺度不变特征)
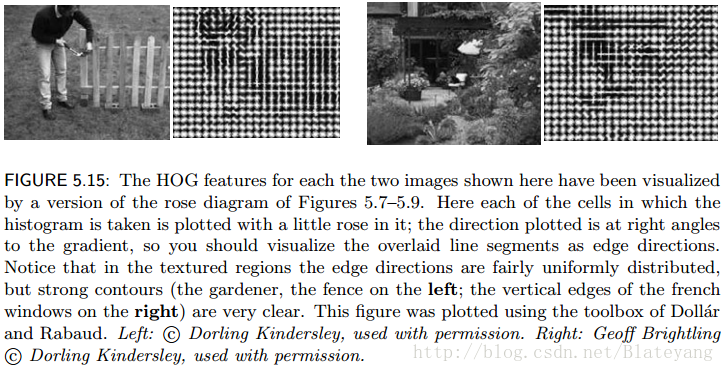
HOG(Histogram Of Gradient orientations)特征(是SIFT特征的一个重要变体)
纹理
1 什么是纹理
纹理是一种广泛存在,容易识别(对人而言)又很难定义的东西,纹理常常显示出重复性,是物体识别的重要线索,也是材料性质的重要线索
2 局部纹理表示
- 图像纹理通常由重复的元素(纹理基元)组成(是一组纹理基元按照某种方式重复形成的)
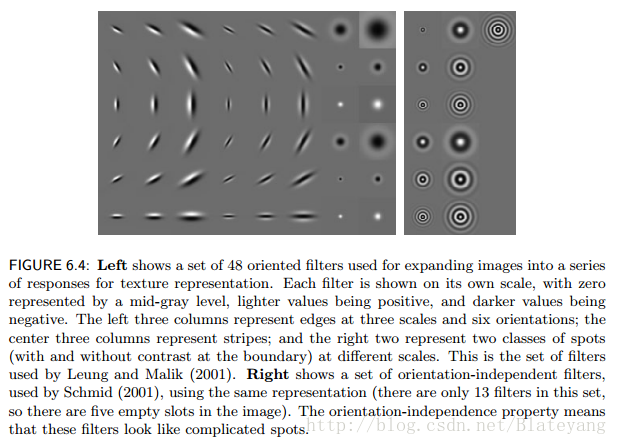
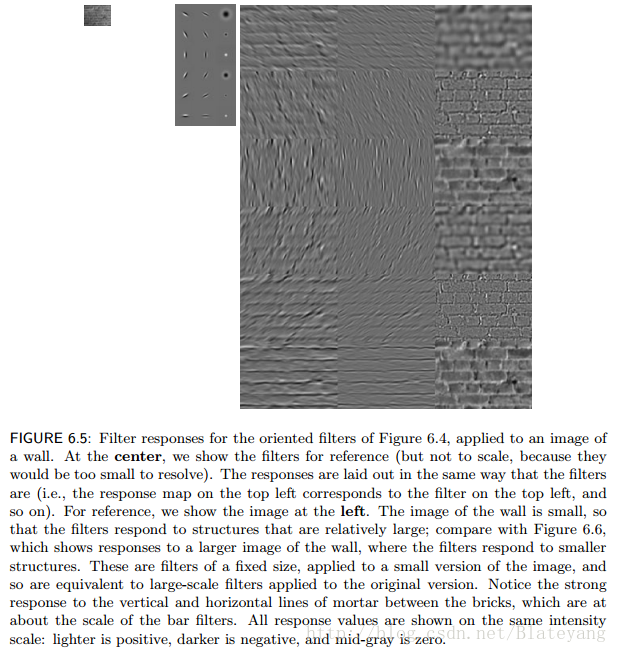
局部纹理表示可以通过使用一组不同尺度的滤波器对图像滤波然后将结果进行综合得到
注:不同尺度的纹理滤波器通常是点状和条状局部纹理表示(纹理的滤波器响应)图示
注:在一点的纹理表示应该包含邻近滤波器输出的综合,而不仅仅是它们自身的滤波器输出
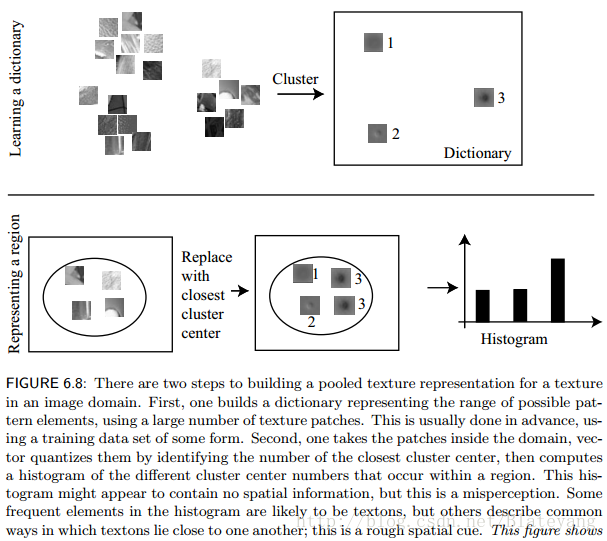
3 合并纹理表示(纹理识别)
- 向量量化和纹理:向量量化是从一个固定尺寸集中用数字表示在连续时空中的向量
- 使用K均值聚类进行向量量化
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









