






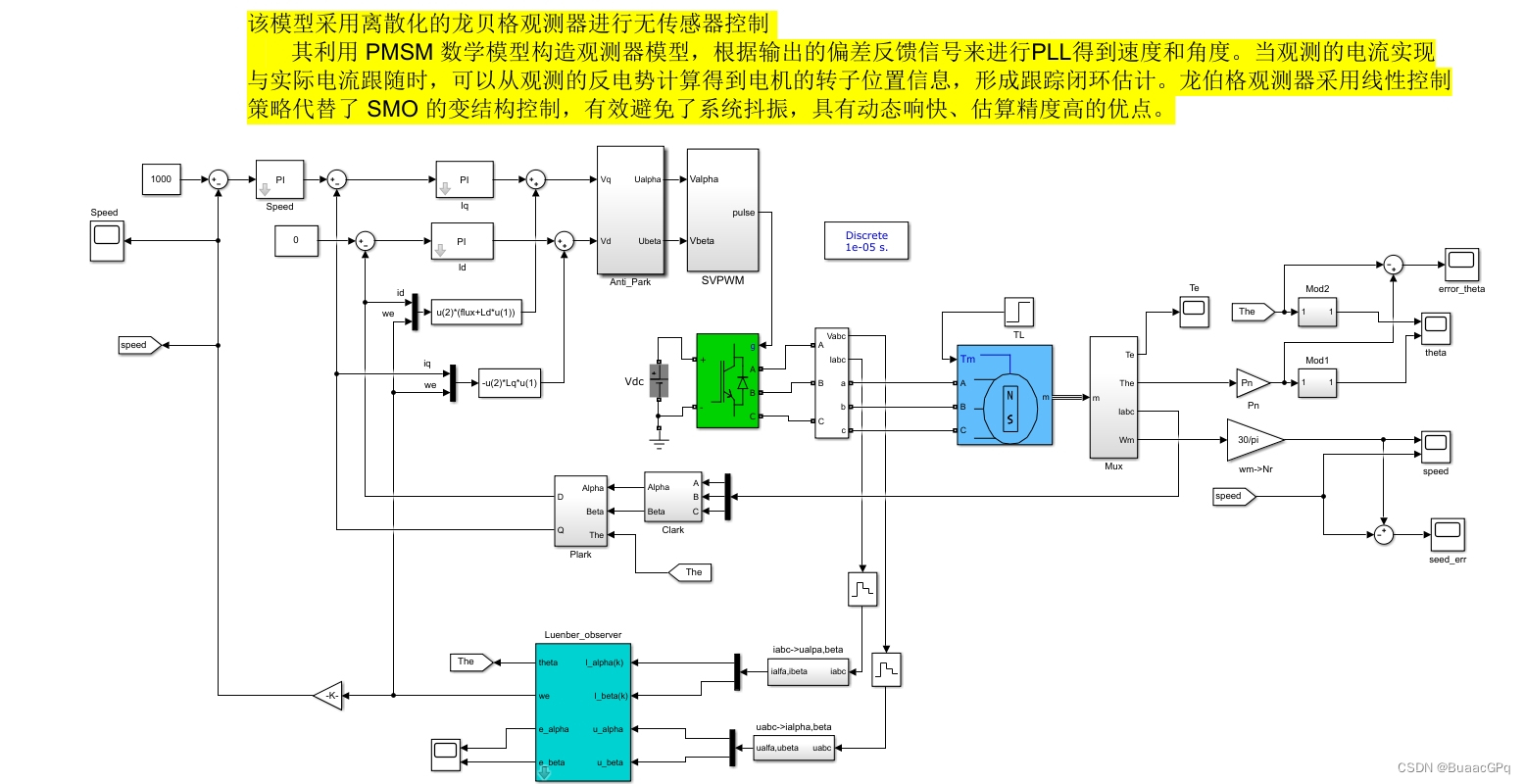
该模型采用离散化的龙贝格观测器进行无传感器控制
其利用 PMSM 数学模型构造观测器模型,根据输出的偏差反馈信号来进行PLL得到速度和角度。
当观测的电流实现与实际电流跟随时,可以从观测的反电势计算得到电机的转子位置信息,形成跟踪闭环估计。
龙伯格观测器采用线性控制策略代替了 SMO 的变结构控制,有效避免了系统抖振,具有动态响快、估算精度高的优点。
标题:基于离散化的龙贝格观测器的无传感器控制技术分析
摘要:本文介绍了一种基于离散化的龙贝格观测器的无传感器控制技术。该技术利用PMSM数学模型构造观测器模型,并通过输出的偏差反馈信号实现PLL来获取速度和角度信息。当观测的电流实现与实际电流跟随时,通过观测的反电势计算得到电机的转子位置信息,从而实现闭环跟踪估计。相比于传统的变结构控制方法,离散化的龙贝格观测器采用线性控制策略,有效避免了系统抖振,并具有较高的动态响应速度和估算精度。
一、引言
无传感器控制技术作为一种重要的控制策略,在实际应用中得到广泛的关注。然而,由于系统无法直接获得传感器反馈信号,因此需要采用一种观测器来估计电机状态信息,从而实现闭环控制。本文将介绍一种基于离散化的龙贝格观测器的无传感器控制技术,该技术通过构造观测器模型,并采用线性控制策略来实现高精度的状态估计。
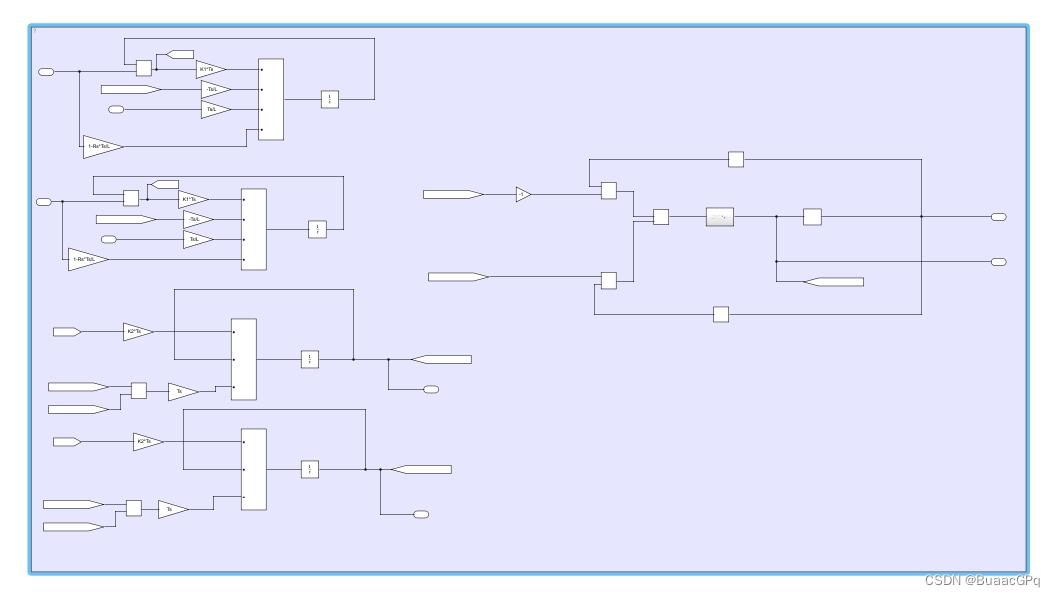
二、离散化的龙贝格观测器原理
离散化的龙贝格观测器是一种基于PMSM数学模型构造的观测器模型。其原理是通过观测电机输出的偏差反馈信号,利用PLL技术获取电机的速度和角度信息。具体而言,观测器通过跟踪实际电流与观测电流的差异来实现闭环估计。在观测器中,通过观测电机的反电势信号,可以计算出电机的转子位置信息,从而实现对电机状态的跟踪和估计。相比于传统的SMO变结构控制方法,离散化的龙贝格观测器具有以下优点:1)有效避免了系统抖振现象,提高了控制系统的稳定性;2)动态响应快,能够实现较高的控制精度。
三、离散化的龙贝格观测器的实现与应用
离散化的龙贝格观测器的实现过程主要包括观测电流的设计和观测反电势的计算。观测电流的设计需要根据PMSM模型和控制要求进行优化,以实现与实际电流的高度跟随。观测反电势的计算则是通过采集电机的反电势信号进行数学处理,得到转子位置信息。在实际应用中,离散化的龙贝格观测器可以广泛应用于无传感器控制系统中,如电机驱动系统、机器人控制系统等领域,在提高控制系统性能的同时,降低了硬件成本和复杂性。
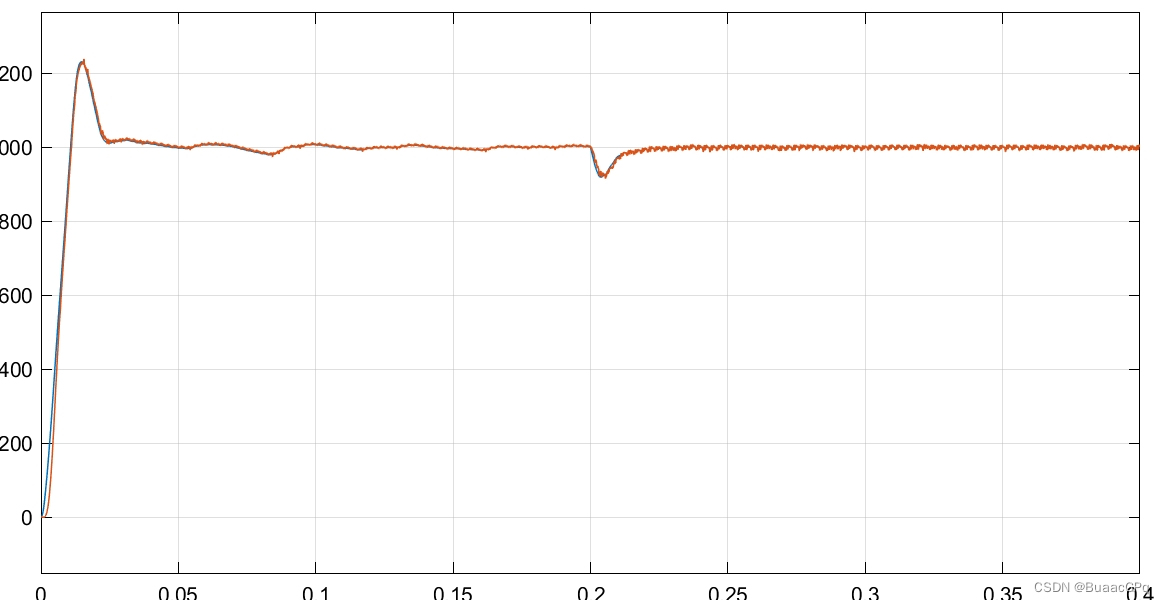
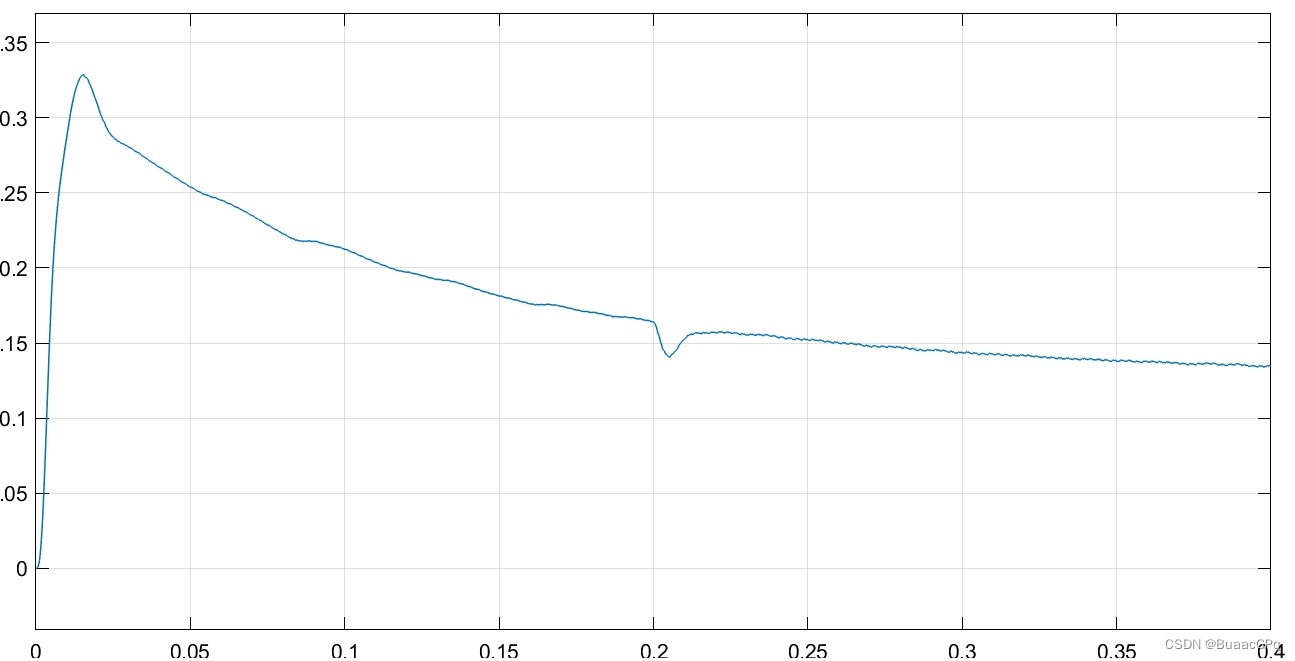
四、实验结果与分析
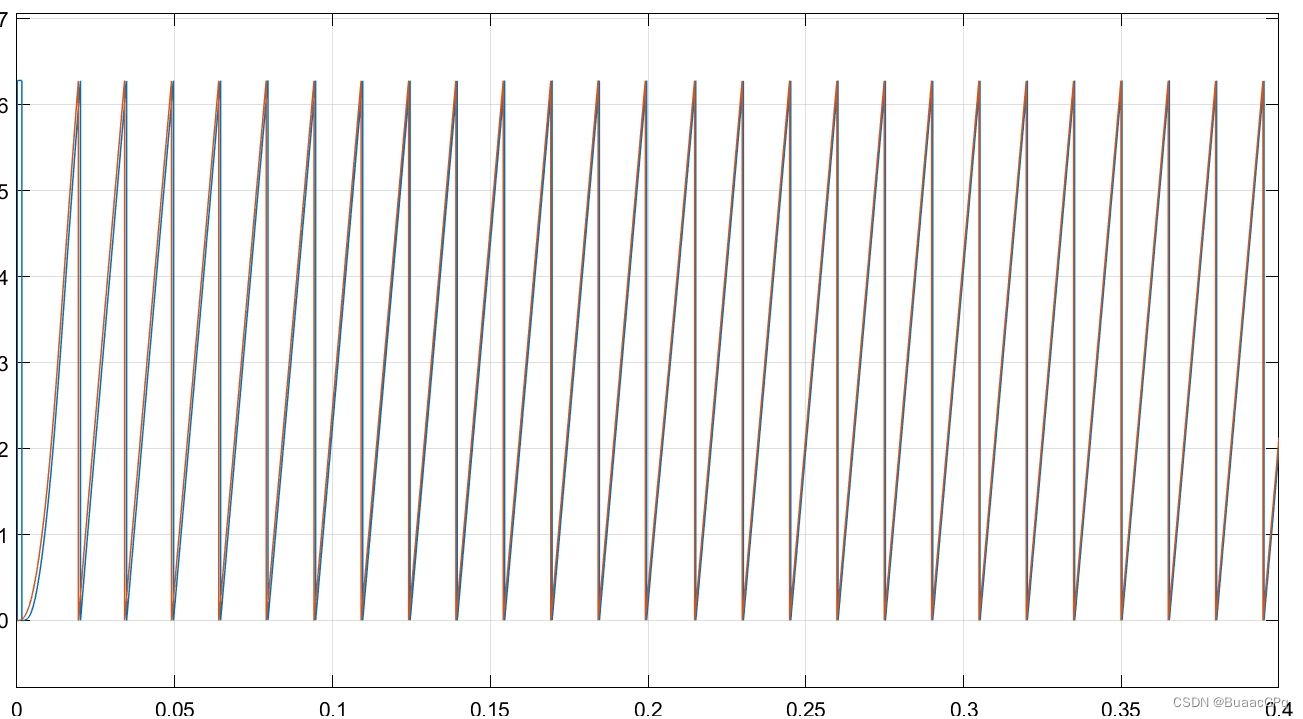
为验证离散化的龙贝格观测器的性能,进行了一系列实验。实验结果表明,离散化的龙贝格观测器能够实现较高的控制精度和动态响应速度。与传统的变结构控制方法相比,离散化的龙贝格观测器具有更好的抗干扰能力和鲁棒性。此外,实验还验证了离散化的龙贝格观测器对传感器故障和参数变化的适应性。
五、总结与展望
本文介绍了一种基于离散化的龙贝格观测器的无传感器控制技术,并对其原理、实现方法和应用进行了详细的分析。通过实验验证,离散化的龙贝格观测器表现出了较高的控制精度和动态响应速度,具有较好的鲁棒性和抗干扰能力。未来,可以进一步探索离散化的龙贝格观测器在其他控制系统中的应用,并对其进行优化和改进,以满足不同应用场景的需求。
相关代码,程序地址:http://lanzouw.top/671040954591.html
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









