






基于STM32G431的IF强拖技术及其双DQ空间切换代码实现
一、引言
在嵌入式和电机控制领域,STM32系列微控制器因其高性能和低功耗特性而备受青睐。本文将围绕基于STM32G431的IF(电流场)强拖技术,以及其双DQ空间切换代码的实现进行详细解析。该技术主要应用于电机控制,特别是无刷直流电机(BLDC)的控制中,通过精确控制电流和电压,实现电机的平稳运行和高效能输出。
二、转子预定位阶段
在电机控制中,转子预定位是电机启动前的关键步骤。基于STM32G431的IF强拖技术,通过精确计算和配置,实现对转子的预定位。这一阶段中,通过预定的电流和电压值,确保电机转子处于一个稳定且准确的位置,为后续的升速和恒速阶段奠定基础。
三、升速阶段
升速阶段是电机从静止状态逐渐加速到设定速度的过程。在这一阶段中,根据预设的加速度曲线,逐步增加电机的电流和电压输出。通过精确控制电流和电压的增量,确保电机平稳且快速地达到设定速度。同时,通过实时监测电机的运行状态,对控制参数进行动态调整,以适应不同的负载和工作环境。
四、恒速阶段
当电机达到设定速度后,进入恒速阶段。在这一阶段中,通过精确控制电机的电流和电压输出,保持电机的稳定运行。通过实时监测电机的运行状态,能够及时调整控制参数,以应对负载变化和工作环境的改变。同时,还具备过流、过压、过温等保护功能,确保电机在异常情况下能够及时停机,保护电机和控制免受损坏。
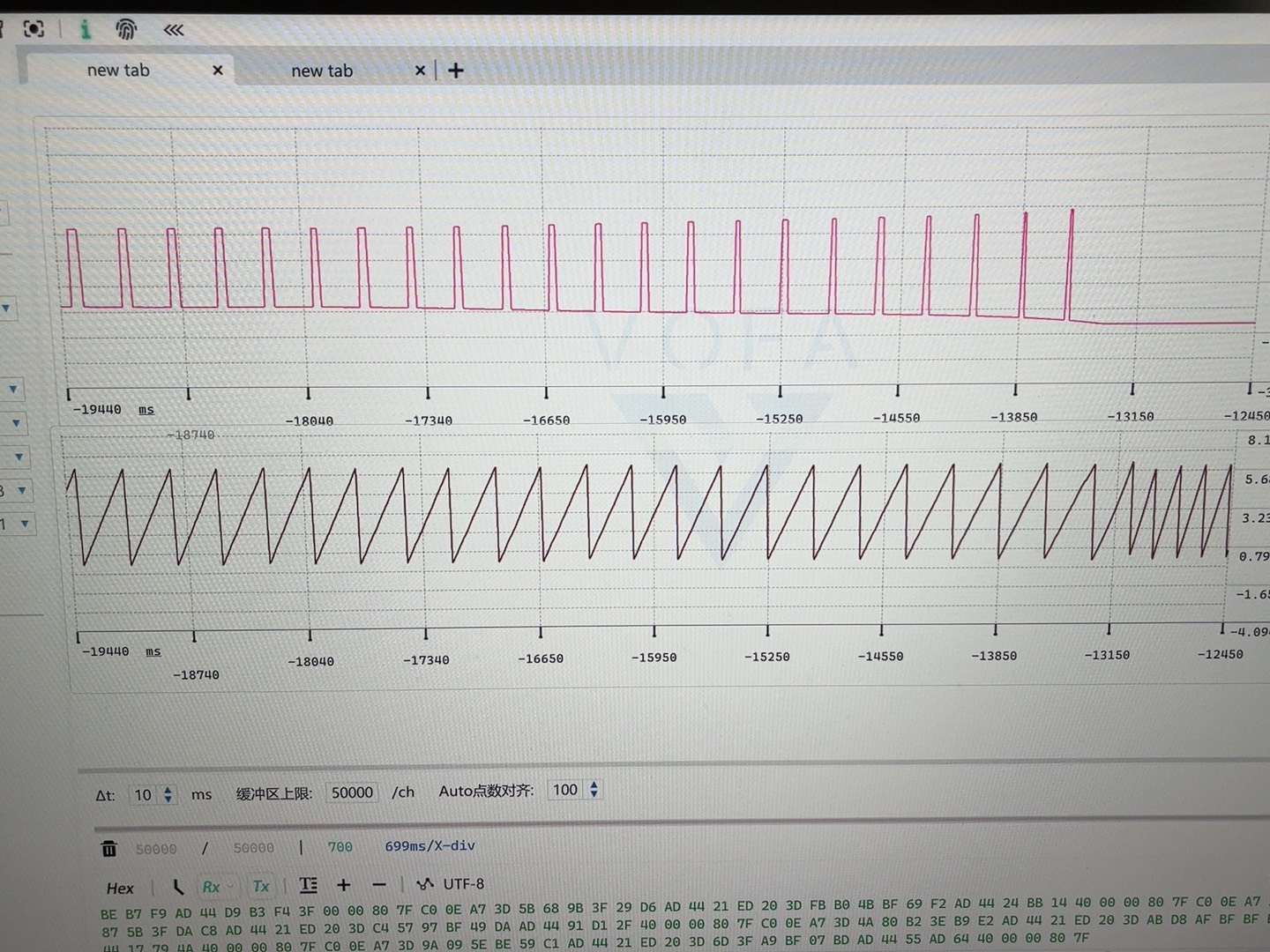
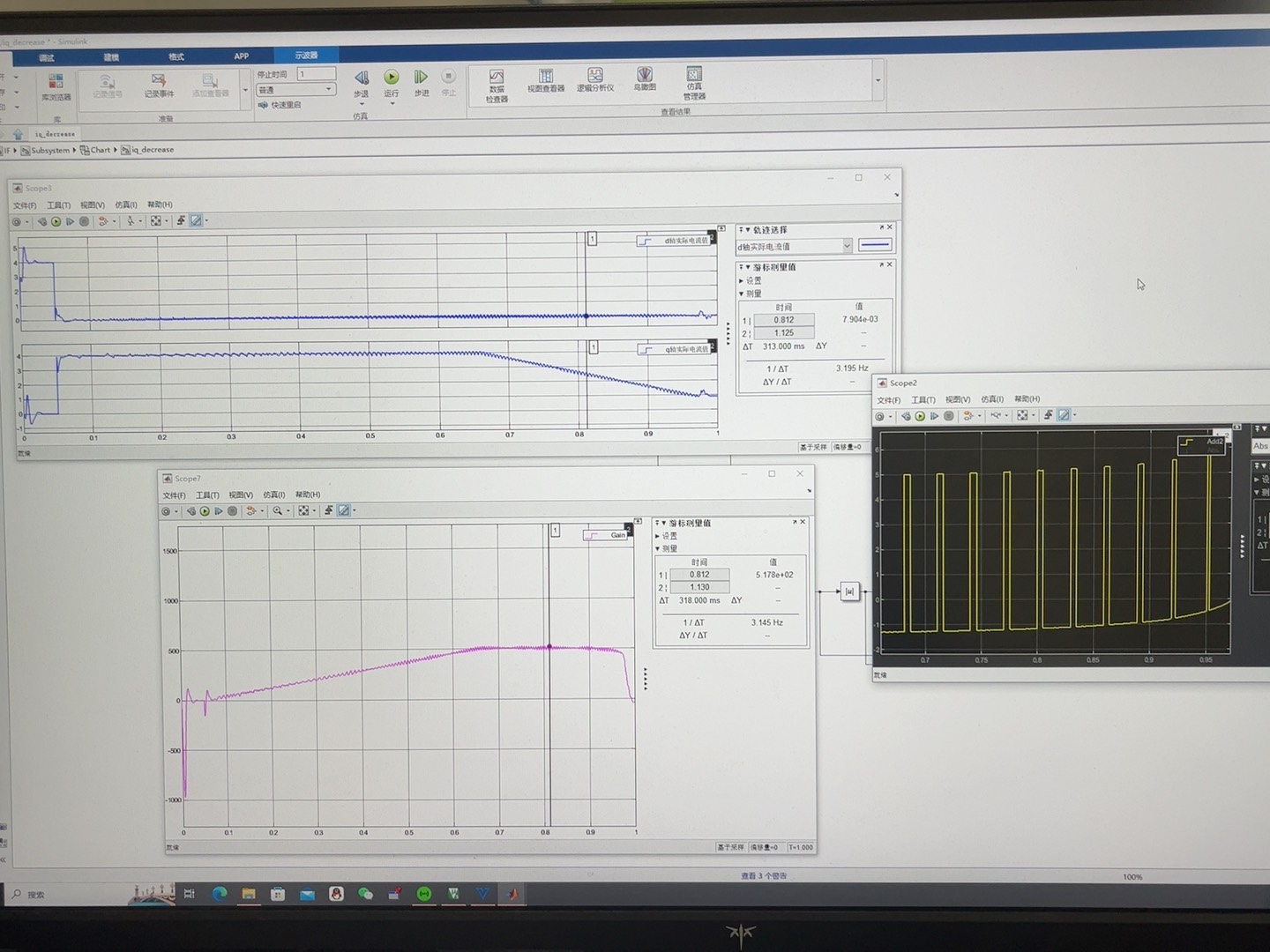
五、IQ下降阶段及切入闭环准备
IQ下降阶段是电机在达到设定速度后,逐渐减少电流输出的过程。这一阶段中,根据预设的电流下降曲线,逐步减小电机的电流输出。通过这一过程,可以降低电机的能耗,同时为切入闭环控制做好准备。在切入闭环准备阶段,进行必要的参数调整和优化,确保闭环控制的准确性和稳定性。
六、代码配置与控制实现
代码配置部分主要由Cube生成,这大大简化了开发流程。然而,控制部分则完全由开发者自己编写。这要求开发者具备深厚的嵌入式开发经验和电机控制理论知识。在代码中,详细的注释有助于理解和维护代码,同时也为后续的调试和优化提供了便利。
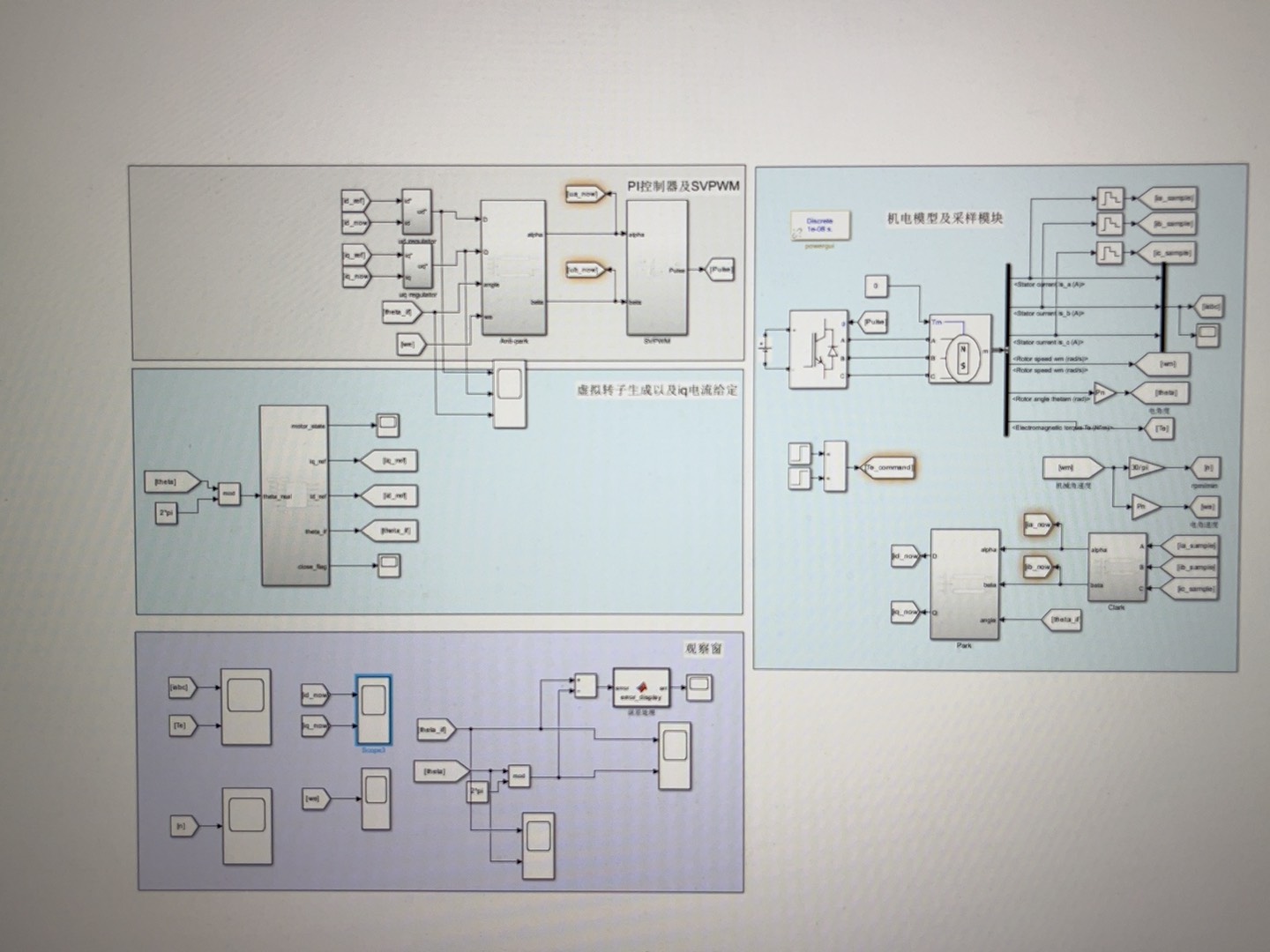
七、双DQ空间切换技术
双DQ空间切换技术是本文的关键技术之一。该技术通过双DQ空间的切换,实现了电机控制的灵活性和高效性。在切换过程中,能够快速且准确地完成空间的切换,保证了电机控制的连续性和稳定性。
八、结论
本文详细解析了基于STM32G431的IF强拖技术及其双DQ空间切换代码的实现。通过转子预定位、升速阶段、恒速阶段以及IQ下降阶段的详细描述,展示了该技术在电机控制中的优越性和实用性。同时,通过代码配置和控制部分的详细分析,展示了开发者在嵌入式开发和电机控制方面的深厚功底。双DQ空间切换技术的应用,进一步提高了电机控制的灵活性和效率。未来,随着技术的不断进步和应用领域的扩展,基于STM32G431的IF强拖技术将在更多领域发挥重要作用。
基于stm32g431的if强拖 + 双dq空间切换代码,有论文支持,主要包含以下流程:
1、转子预定位;
2、升速阶段;
3、恒速阶段;
4、iq下降阶段,准备切入闭环;
代码配置部分由cube生成,控制部分完全自己编写,注释详细



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









