






一:功能介绍
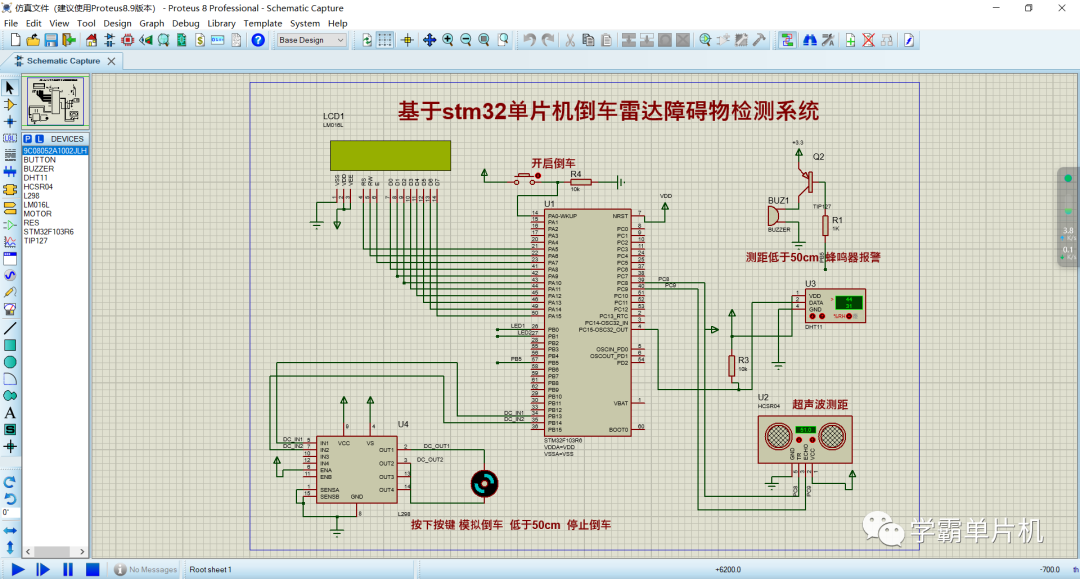
1、采用stm32单片机+LCD1602+DHT11温湿度+超声波测距模块+按键+蜂鸣器+L298N电机驱动,制作一个倒车雷达障碍物检测系统;
2、通过按键按下,开启倒车,L298N驱动电机开始转动,模拟汽车开启倒车;
3、倒车情况下,当超声波检测障碍物距离低于一定值,蜂鸣器进行报警提醒;
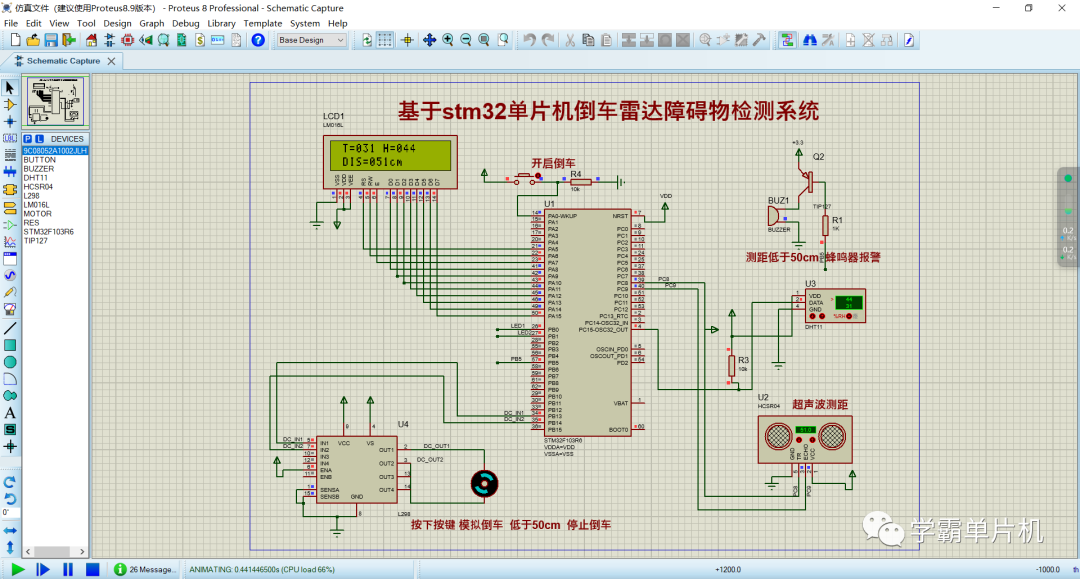
4、LCD1602显示采集的温湿度值和倒车障碍物距离值;
二:仿真演示视频+程序简要讲解:(程序有中文注释,新手容易看懂)
101-基于stm32单片机倒车雷达障碍物检测系统Proteus仿真+程序源码+讲解视频
三:设计软件介绍
本设计使用C语言编程设计,程序代码采用keil5编写,程序有中文注释,新手容易看懂,仿真采用Proteus软件进行仿真,演示视频使用的是Proteus8.9版本;资料包里有相关软件包,可自行下载安装。
四:程序打开方法
特别注意:下载资料包以后一定要先解压!!!(建议解压到桌面上,文件路径太深会导致程序打开异常),解压后再用keil5打开。
程序部分展示,有中文注释,新手容易看懂
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//LCD1602 管脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8| GPIO_Pin_9| GPIO_Pin_10| GPIO_Pin_11| GPIO_Pin_12| GPIO_Pin_13| GPIO_Pin_14| GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7 |GPIO_Pin_6|GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
int main(void)
{
DHT11_Data_TypeDef DHT11_Data;
RCC_SYSCLKConfig(RCC_SYSCLKSource_HSI);
/* 配置SysTick 为1us中断一次 */
SysTick_Init();
LED_GPIO_Config();
motor_init(); GPIO_Configuration();
Init1602();
//NVIC_Configuration();
TIM2_Configuration();
UltrasonicWave_Configuration();
// USART_Config();//初始化串口1
NVIC_Configuration();
/*初始化DTT11的引脚*/
DHT11_Init();
UltrasonicWave_StartMeasure();
Key_GPIO_Config();
WrByte1602(0,1,'T'); //符号显示
WrByte1602(0,2,'=');
WrByte1602(0,7,'H');
WrByte1602(0,8,'=');
WrByte1602(1,1,'D');
WrByte1602(1,2,'I');
WrByte1602(1,3,'S');
WrByte1602(1,4,'=');
WrByte1602(1,8,'c');
WrByte1602(1,9,'m');
GPIO_SetBits(MOTOR_GPIO,Motor_Pin_13);
GPIO_SetBits(MOTOR_GPIO,Motor_Pin_14);
while(1)
{
//调用DHT11_Read_TempAndHumidity读取温湿度,若成功则输出该信息
if( DHT11_Read_TempAndHumidity ( & DHT11_Data ) == SUCCESS)
{
WrByte1602(0,3,AsciiCode[DHT11_Data.temp_int%1000/100]);//温度
WrByte1602(0,4,AsciiCode[DHT11_Data.temp_int%100/10]);
WrByte1602(0,5,AsciiCode[DHT11_Data.temp_int%10]);
WrByte1602(0,9,AsciiCode[DHT11_Data.humi_int%1000/100]);//湿度
WrByte1602(0,10,AsciiCode[DHT11_Data.humi_int%100/10]);
WrByte1602(0,11,AsciiCode[DHT11_Data.humi_int%10]);
}
UltrasonicWave_StartMeasure();//超声波测距
WrByte1602(1,5,AsciiCode[UltrasonicWave_Distance%256/100]);
WrByte1602(1,6,AsciiCode[UltrasonicWave_Distance%256%100/10]);//测距
WrByte1602(1,7,AsciiCode[UltrasonicWave_Distance%256%10]);
if(UltrasonicWave_Distance%256<50) //障碍物小于50cm 停止倒车 蜂鸣器报警
{
beep=0;
GPIO_SetBits(MOTOR_GPIO,Motor_Pin_13);
GPIO_SetBits(MOTOR_GPIO,Motor_Pin_14);
}
else beep=1;
if( key1 == 1 )//开启倒车
{
GPIO_SetBits(MOTOR_GPIO,Motor_Pin_13);
GPIO_ResetBits(MOTOR_GPIO,Motor_Pin_14);
}
五:仿真文件(采用Proteus打开)

六:资料清单展示(文件中包含的相关资料)















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









