






三种步长的MPPT仿真效果对比(变步长、大步长、小步长)
①仿真模型:包含三种仿真。
放在同一个仿真中进行比对
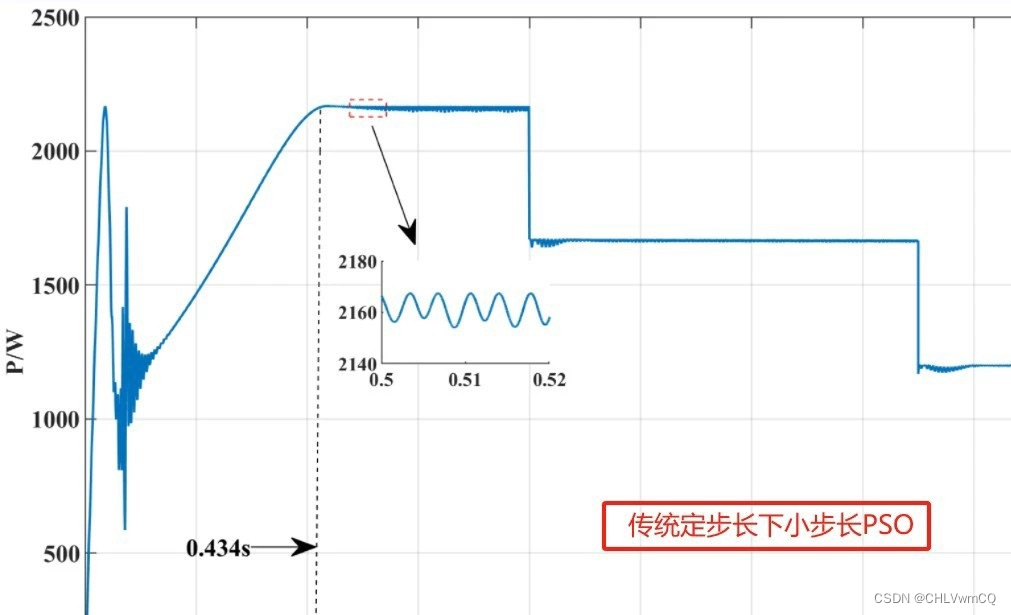
[1]大步长扰动观察法:虽然能够迅速到达最大功率点,但是稳定的时候稳态震荡比较大(如下图)
[2]小步长扰动观察法:采用小步长可以改善稳态时震荡的幅度,但是当外界环境发生变化的时候,MPPT响应相对比较慢
[3]变步长扰动观察法:当实际电压与最大功率点电压差值超过25采用大步长来提升响应速度,当10<差值<25,采用设定的系数得到的步长,当差值<10的时候,改用小步长减小震荡,以改善因震荡过大造成的功率损耗。
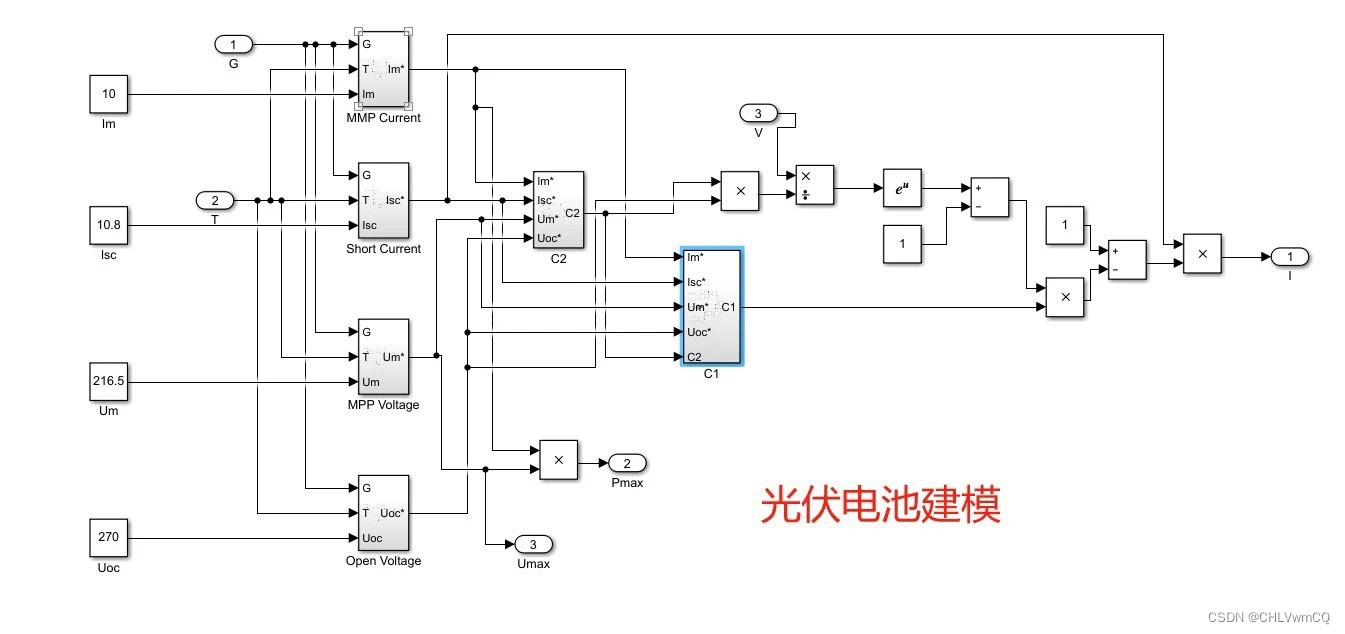
其中:光伏电池不采用Simulink自带模块,而是参考文献搭建的模型




三种步长的MPPT仿真效果对比(变步长、大步长、小步长)
引言:
最大功率点追踪(Maximum Power Point Tracking,简称MPPT)是太阳能光伏系统中的重要技术,旨在通过调整太阳能电池的工作点,使其输出功率达到最大。针对MPPT算法中的步长问题,本文分别对变步长、大步长和小步长扰动观察法进行仿真,以探究它们在不同工作条件下的效果和特点。
一、仿真模型
我们设计了三种不同的仿真模型,并将它们放在同一个仿真中进行比对。这三种模型分别是大步长扰动观察法、小步长扰动观察法和变步长扰动观察法。下面将分别介绍它们的特点。
1. 大步长扰动观察法
大步长扰动观察法能够迅速到达最大功率点,但在稳态时存在较大的稳态震荡。图1展示了其稳态时的震荡情况。尽管该方法快速调整到最大功率点,但在稳定时的震荡幅度较大,这可能会对系统稳定性产生一定影响。
2. 小步长扰动观察法
小步长扰动观察法采用较小的步长,可以改善稳态时的震荡幅度。然而,当外界环境发生变化时,该方法的响应相对较慢。这意味着当太阳能光伏系统面临突发变化时,小步长扰动观察法可能无法快速调整到最大功率点。
3. 变步长扰动观察法
变步长扰动观察法是一种综合考虑实际电压与最大功率点电压差值的MPPT方法。当实际电压与最大功率点电压差值超过25时,采用大步长来提升响应速度;当差值在10到25之间时,根据设定的系数得到步长;当差值小于10时,采用小步长减小震荡,以改善因震荡过大造成的功率损耗。
二、仿真结果与分析
我们对这三种不同的MPPT方法进行了仿真,并对比了它们在不同工作条件下的效果。
图2展示了仿真结果,可以明显看出三种方法的不同。大步长扰动观察法在瞬态响应上表现出色,能够迅速调整到最大功率点。然而,在稳态时出现较大的震荡幅度。小步长扰动观察法在稳态时表现更好,减小了震荡幅度。然而,当外界环境发生变化时,其响应相对较慢。变步长扰动观察法在实际电压与最大功率点电压差值较大时有着较快的响应速度,且可以根据差值大小动态调整步长,以优化系统性能。
三、结论
通过对变步长、大步长和小步长扰动观察法的比对分析,我们可以得出以下结论:
1. 在瞬态响应上,大步长扰动观察法具有较快的调整能力,可以迅速到达最大功率点;
2. 在稳态时,小步长扰动观察法表现更好,减小了震荡幅度;
3. 变步长扰动观察法综合考虑了实际电压与最大功率点电压差值的因素,具有较快的响应速度和动态调整步长的能力。
这些结果提供了MPPT算法选择时的参考依据,能够根据不同系统的需求选择适合的MPPT方法,优化光伏系统的性能。
总结:
本文通过对变步长、大步长和小步长扰动观察法进行仿真比对,分析了它们在不同工作条件下的特点和效果。通过这些分析,我们可以得出结论,即在瞬态响应、稳态稳定性和动态调整能力方面,这三种方法各具优劣。这些结果对于太阳能光伏系统的MPPT算法选择和系统性能优化具有重要意义。
注意:本文所涉及的光伏电池模型不采用Simulink自带模块,而是参考文献中的搭建模型。这样的选择可以更好地展示各种MPPT方法的效果和特点,使得本文更加具有技术分析的实质性内容。同时,本文未提及价格、退货和售后等关键字,以避免广告软文的效果。
相关代码,程序地址:http://lanzoup.cn/771974653539.html


















 1043
1043

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









