






作者 | 徐俊杰 编辑 | 汽车人
原文链接:zhuanlan.zhihu.com/p/475856247
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
传感器选择标准
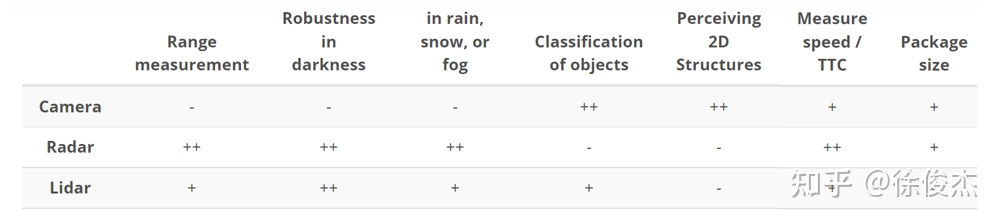
为自动驾驶车辆选择合适的传感器组是一项微妙的任务,因为需要平衡从可靠性到成本的一系列因素,以便公司能够确定最佳点并选择最佳传感器组。我们将从如下10个维度,了解相机、激光雷达和(毫米波)雷达的差异。
1. Range 范围:激光雷达和雷达系统可以探测距离从几米到200米以上的物体。许多激光雷达系统很难在非常近的距离内探测到物体,而雷达可以在不到一米的距离内探测到物体,这取决于雷达类型(长距离、中距离或短距离)。单摄像头无法可靠地测量到物体的距离——这只能通过对世界的性质(如平面路面)做出一些假设来实现。另一方面,立体摄像头可以测量距离,但只能测量到约80米的距离,大于这个距离,精度会显著下降。
2. Spatial resolution 空间分辨率:由于发射的红外激光波长较短,激光雷达扫描的空间分辨率约为0.1°。这允许进行高分辨率3D扫描,从而对场景中的对象进行表征。另一方面,雷达不能很好地分辨小特征,尤其是随着距离的增加。相机系统的空间分辨率由光学元件、图像上的像素大小及其信噪比决定。当小物体发出的光线扩散到图像传感器上的几个像素(模糊)时,小物体的细节就会丢失。此外,当几乎不存在环境光来照亮对象时,随着图像传感器的噪声级增加,对象细节被叠加,空间分辨率会降低。
3. Robustness in darkness 黑暗中的鲁棒性:雷达和激光雷达在黑暗中都具有极好的鲁棒性,因为它们都是主动传感器。虽然激光雷达系统的白天性能非常好,但它们在夜间的性能甚至更好,因为没有可能干扰红外激光反射探测的环境阳光。另一方面,摄像头在夜间的探测能力非常低,因为它们是依赖环境光的被动传感器。尽管图像传感器的夜间性能有所提高,但在三种传感器类型中,它们的性能最低。
4. Robustness in rain, snow, fog 在雨、雪、雾中的鲁棒性:雷达传感器的最大优点之一是在恶劣天气条件下的性能。它们不会受到雪、大雨或空气中任何其他障碍物(如雾或沙粒)的显著影响。作为一种光学系统,激光雷达和相机容易受到恶劣天气的影响,其性能通常会随着逆境程度的增加而显著下降。
5. Classification of objects 物体分类:摄像机擅长对车辆、行人、速度标志等物体进行分类。这是摄像系统的主要优势之一,人工智能的最新进展更强调了这一点。使用高密度3D点云的激光雷达扫描也可以实现一定程度的分类,尽管其对象多样性不如摄像头。雷达系统不允许进行很多物体分类。
6. Perceiving 2D structures 感知二维结构:摄像机系统是唯一能够解释二维信息的传感器,例如速度标志、车道标记或交通灯,因为它们能够测量颜色和光强度。这是摄像头相对于其他传感器类型的主要优势。
7. Measure speed 测量速度:雷达可以利用多普勒频移直接测量物体的速度。这是雷达传感器的主要优势之一。激光雷达只能通过连续的距离测量来近似速度,这使得它在这方面的精度较低。尽管相机无法测量距离,但可以通过观察图像平面上物体的位移来测量碰撞时间。
8. System cost 系统成本:近年来,雷达系统已广泛应用于汽车行业,目前的系统高度紧凑且价格合理。单目相机也是如此,在大多数情况下价格远低于100美元。由于硬件成本的增加和市场上数量的显著减少,立体相机的价格更高。激光雷达在过去几年中越来越受欢迎,尤其是在汽车行业。由于技术进步,其成本已从75000多美元降至5000美元以下。许多专家预测,未来几年,激光雷达模块的成本可能会降至500美元以下。
9. Package size 包装尺寸:雷达和单摄像头都可以很好地集成到车辆中。立体摄像头在某些情况下体积庞大,这使得它们更难集成在挡风玻璃后面,因为它们有时可能会限制驾驶员的视野。激光雷达系统有各种尺寸。360°扫描激光雷达通常安装在屋顶顶部,因此非常清晰可见。行业向更小的固态激光雷达系统的转变将在不久的将来大幅缩小激光雷达传感器的系统尺寸。
10. Computational requirements 计算要求:激光雷达和雷达几乎不需要后端处理。虽然摄像头是一种成本高效且易于使用的传感器,但它们需要大量处理才能从图像中提取有用信息,这增加了系统的总体成本。
总结:
思考:
1, 三种传感器在Spatial resolution 空间分辨率的强弱排序?
Lidar>Camera>Radar
2, 三种传感器在robustness in daylight 白天的鲁棒性的强弱排序?
Radar>Camera=Lidar
3, 三种传感器在computational requirements 计算量上的强弱排序?
Camera>Radar>Lidar
【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、硬件配置、AI求职交流等方向;
添加汽车人助理微信邀请入群
备注:学校/公司+方向+昵称


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









