






编辑 | 谷粉学术
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
本文只做学术分享,如有侵权,联系删文
首都医科大学附属北京朝阳医院教授、博导施焕中分享的一则面试博士毕业生的经历,其中一位小弟现场的表现给他的印象十分深刻,甚至引发了他对中国社会错综复杂的人际关系的思考。

图源:丁香园
施焕中教授写道:这名博士应该属于那种在小城市待得不特别爽的聪明人,于是乎想通过攻读博士学位一举鱼跃龙门,然而问题是他在科研方面的成绩也无过人之处,这个时候,应聘者的态度和临场表现就显得十分重要。
然而,该博士提供的书面材料显示,他发表了 1 篇 SCI 论文和 6 篇中文文章。6 篇中文论文第一作者 2 篇,第二作者 4 篇,好像其中 4 篇为综述。但在应用 PPT 口头陈述时,却说他作为第一作者发表了 6 篇中文论文。
到提问环节时,有教授这样发问:「你说发表 6 篇论文,应聘书中只看到 2 篇,还有 4 篇呢?」博士这样回答:「另外 4 篇我虽然不是第一作者,第一作者是我的导师,实际上都是我一个人写的。」
施焕中教授表示:世界上不再有什么应变比这样的回答更糟糕,这几乎注定了他的败局。在集中讨论的环节,有教授指出:这样的年轻人怎么能够把老板给卖了呢?招进来之后如何配合科主任做好工作?以后怕是不能与同事们和谐相处。
遇到这样的学生,导师都是怎样的心态呢?此前,有个导师在网上发文直言和研究生“断交”,起因就是期刊发文署名问题让自己寒心了。导学论文如何署名,还真是门学问,让人摸不着头脑。
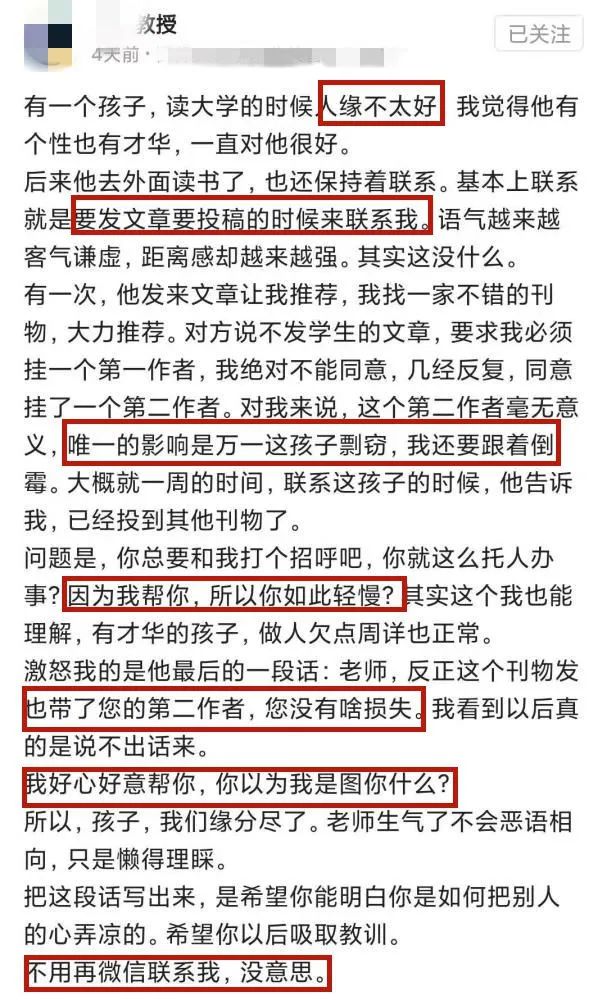
有的学生害怕没有贡献的导师抢占论文署名,但有的导师则表示,自己也很害怕学生出于某种目的把自己随便署名为第一作者。
其实,这种情况在硕博群体中也时有发生。究其原因,最主要的就是便于论文录稿。很多高质期刊的录稿中,明确要求论文的第一作者必须为副教授及以上级别,所以,一些研究生就会将论文第一作者写为自己的导师便于自己论文录稿。
论文一作,到底归谁
关于论文署名这件事,有不少研究生都有过类似苦恼:


从根源分析,双方的想法都没错,这是学术圈论文署名大环境不佳长久积累下的污垢。
一方面,如果学生是论文的最大贡献者,学生本人挂第一作者,导师挂通讯作者,是一个非常合理的署名规则。但总有个别人打破规则,在此搞不当得利。
另一方面,期刊发论文不看论文质量而看作者出身,逼迫一些导师不得不署名,也是畸形的审稿要求。
在这样的环境下,学生被抢署名,导师被迫署名,学生瞒着导师偷偷发论文的事情屡屡发生。与其每每都让双方心凉,不如从一开始就敞开心扉讨论清楚,或者是在顺利毕业的大前提下有所取舍,也不会闹到“老死不相往来”的地步了。
回到主题高校招聘上来,在应聘时,该不该强调博士期间的论文,其实都是自己完成的呢?答案当然是否定的,如果面试者这样问你,八成是在故意看你怎么回答。为什么呢,身为高校中的院长、团队大佬类人物,当然知道导师与学生的论文署名是怎么回事,且他们肯定是高校现行团队科研模式的受益者,搞不好等着把你招进来后,白嫖你的科研成果呢,如果你就这么急着把读博期间导师的对你的”栽培“之恩给抛掉,那谁还敢招你入团队呢?下面的话虽然难听,但确是事实:
在高校,离了平台,不抱个粗腿,你得不到成长!别以为现在的杰青、优青完全是自己努力出来的,没个强大的师门或是学院为你撑腰,你申报一个试试?
于是,身处滚滚洪流中的你,要怎么办?
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、协同感知、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2000人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









