






作者 | momo 编辑 | 汽车人
原文链接:https://zhuanlan.zhihu.com/p/670328855
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【传感器标定】技术交流群
本文只做学术分享,如有侵权,联系删文
原文:https://arxiv.org/pdf/2303.17137.pdf
论文概述
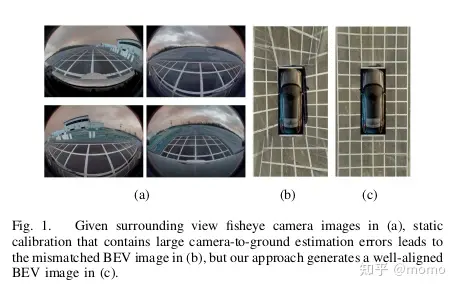
本文介绍了一种在线单目相机与地面校准方法,该方法不需要特定目标的支持,并通过轮速计粗略提取地面特征并使用滑动窗口基因素图优化估计相机与地面校准参数。考虑到行驶过程中相机与地面非刚体变换的问题,作者提供了量化校准性能和停止准则以报告/广播满足要求的校准结果。实验表明,该算法有效且优于现有技术。
论文方法
方法描述
该论文提出了一种基于相机与地面坐标系之间的关系来实现相机-地面校准的方法。该方法通过利用车辆上的相机获取图像,并结合车辆的运动轨迹,预测下一张图像中地面上物体的位置,并在两张相邻图像之间提取粗略的地表特征,然后通过几何验证方法得到精确定位的地表特征点。最后,将这些地表特征点用于优化相机姿态和相机到地面的高度。
方法改进
该方法相对于传统的相机-地面校准方法具有更高的精度和鲁棒性。它不需要任何人工干预或手动标记,而是通过自动化的算法来实现相机-地面校准。此外,该方法还可以处理各种类型的地表特征,包括道路、建筑物等。
解决的问题
该方法解决了传统相机-地面校准方法中的精度和鲁棒性问题。它可以自动识别并选择地表特征点,从而提高了相机-地面校准的准确性和可靠性。此外,该方法还可以处理多种类型的地表特征,使其更加通用
论文实验
本文进行了多项实验来比较和验证所提出的算法的性能。
首先,在平坦的道路上使用了四台鱼眼相机采集数据,并与高精度定位系统生成的地面校准结果进行比较,以评估动态校准的基准性能。
其次,在公共道路环境下,使用提出的方法和其他三种现有方法(包括Liu等人的方法、OECS和ROECS)进行比较,以评估其在不同驾驶场景下的表现。
最后,通过计算特征转移误差和特征残差误差来衡量不同方法之间的差异。
在平坦道路上的实验中,本文提出了基于车辆移动状态的在线动态校准方法,并与其他方法进行了比较。实验结果表明,本文的方法在平稳行驶时可以产生连续稳定的相机到地面校准,并且相对于其他方法可以获得更好的绝对变化值。例如,在俯仰角、偏航角和高度估计方面,本文的方法获得了44.4%、50.0%和71.2%的显著提升。
在公共道路上的实验中,由于缺乏GT校准,本文提出了新的评估指标来测量不同方法估计出的外参质量。实验结果表明,本文的方法在不同的驾驶场景下都具有更好的表现,尤其是在城市和郊区的数据集上。例如,在Suburban数据集上,本文的方法比最佳现有方法提高了44.2%,而在Urban数据集上,本文的方法比最佳现有方法提高了67.6%。
总的来说,本文提出的算法在静态和动态情况下都能提供高质量的相机到地面校准,并且在不同的驾驶场景下都表现出色。
论文总结
文章优点
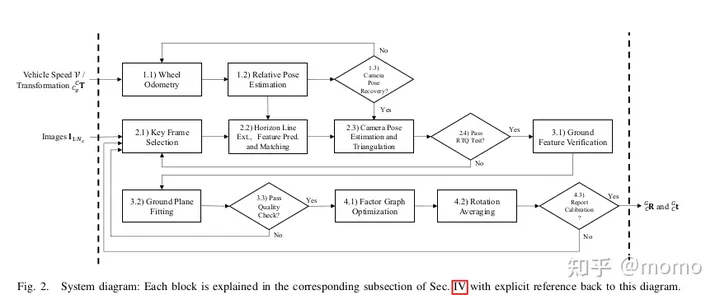
本文提出了一种在线相机到地面无目标标定方法,能够在驾驶过程中自动生成非刚体变换,将相机坐标系与地面坐标系对应起来。该方法采用了新颖的粗细结构来选择地面上的特征,并通过几何验证方法进行了验证。在三角化的地面上进行了平面拟合以获得地面法向量和相机中心到地面高度,并通过滑动窗口中的因子图优化进一步精化了这些参数。通过旋转平均确定相机到地面的转换,并提供了满足校准结果的停止标准。作者使用真实数据集对该算法进行了广泛测试,结果显示该方法有效且优于现有技术。此外,该文章还提出了度量校准性能的指标和停止准则,确保了校准质量。因此,该方法不仅能够有效地解决相机到地面的标定问题,而且还具有较高的实用性和可靠性。
方法创新点
本文的方法创新点在于采用了在线方式实现相机到地面的标定,不需要任何特定的目标或形状。该方法利用了轮速计预测出的地平线位置,以及通过几何验证方法筛选出的地面特征来进行校准。此外,该方法还采用了滑动窗口中的因子图优化,进一步提高了校准精度。同时,该方法还提供了一些度量校准性能的指标和停止准则,可以更好地保证校准的质量。
未来展望
未来的研究方向包括减少因子图优化的时间复杂度,以及进行可观测性分析,以便识别出有助于丢弃不必要的姿态和地面特征的退化运动段。这将有助于进一步提高校准的效率和准确性。另外,还可以考虑将该方法应用于其他类型的车辆或场景中,以扩展其应用范围。
可借鉴点:
在本文中,为了评估相机到地面的校准性能并确定何时停止校准过程,作者提出了两个指标:
误差限(Error Bound):定义为相机到地面校准参数的最大允许偏差。作者建议使用平均绝对定位误差(MAPE)作为误差限的计算方法。
停止准则(Stopping Criteria):当满足一定条件时,停止相机到地面校准的过程。作者提出的停止准则包括:
校准迭代次数达到预设值;
误差限内的平均绝对定位误差(MAPE)小于给定阈值;
相机到地面校准参数的变化率低于给定阈值。
通过这些指标和停止准则,作者可以有效地评估相机到地面的校准性能,并决定何时停止校准过程。
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、协同感知、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2000人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









