






 文章介绍了多个自动驾驶相关职位,包括SLAM定位算法工程师、深度学习地图定位工程师,主要职责涉及车端定位、建图、算法研发与优化,强调了相关经验和技能的要求。职位涵盖了北京和上海两地,且包含实习和社招机会。
文章介绍了多个自动驾驶相关职位,包括SLAM定位算法工程师、深度学习地图定位工程师,主要职责涉及车端定位、建图、算法研发与优化,强调了相关经验和技能的要求。职位涵盖了北京和上海两地,且包含实习和社招机会。
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
投递渠道,以下路径搜索职位,与职位相关问题也可以邮件咨询:zhenxing.you@nio.com
社招:“蔚来招聘”微信公共号-> 社会招聘->社招官网-> 搜索职位:填写内推码:QEN8TJZ
实习:“蔚来招聘”微信公共号--> 校园招聘-->日常实习:填写内推码:QEN8TJZ
[社招]自动驾驶SLAM定位算法工程师
工作地点:北京,上海
职位描述
车端基于多源信息(Lidar/Camera/Radar/IMU/Wheel/矢量)的里程计和建图算法研发;
车端无GNSS场景下的地图定位已量产方案持续优化,问题跟进和解决;
面向新车型,新智驾硬件系统挑战的地图定位/跨模态定位/相对定位的算法研发;
算法的数值计算和工程优化,打造轻量级高效率的车端模块并负责部署量产落地。
职位要求
2年以上SLAM定位建图工作经验,有智驾业务量产落地经验者优先;
具备扎实的状态估计、数值计算、C++编程和软件工程能力;
熟悉经典的地图定位(矢量/几何特征/粒子滤波等)方案和SLAM算法框架(FastLIO/LOAM系/MSCKF/VINS等);
强烈的owner和交付意识,热爱智驾和机器人技术;
加分项:熟悉AVP场景定位建图算法方案,交付过相关量产业务优先。
[社招]智能驾驶地图定位深度学习算法工程师
工作地点:上海
职位描述
研究开发Camera及Lidar的离线云端建图大模型,及相关算法模块的研发工作;
语义建图元素识别模型及相关算法模块的研发工作,相关数据集的建立;
工作内容涉及:算法研究,设计和开发,实验调试,模型训练及测试,大数据处理及统计分析,报告及文档撰写,算法落地优化等。
职位要求
优秀的编程能力,熟悉Python和C/C++;
工程能力扎实,有良好的数据结构和算法能力,数据基础优秀;
热爱技术,工作细致认真,追求高质量的工作产出;
深度学习相关领域研究或工作经验。
加分项
实操能力优秀,熟悉Linux和Shell操作,有大量或复杂数据处理经历;
相关领域发表过高水平论文,包括不限于深度学习,计算机视觉,多传感器融合,SLAM建图等;
学术界或工业界优秀团队的实习经历;
有大规模深度学习训练系统或高性能计算相关开发或优化经验;
熟悉Lidar,IMU,GNSS,Camera等多传感器融合算法。
[社招]自动驾驶-高精定位/语义SLAM算法工程师
职位描述:我们正在寻找一名有经验的语义SLAM算法开发工程师,专注于回环检测和匹配算法的研发。作为团队的核心成员,您将负责开发先进的自动驾驶汽车高精定位、语义SLAM算法,以实现自动驾驶车辆在复杂场景中的准确定位和地图构建。您将专注于回环检测技术和匹配算法的创新与优化,提高自动驾驶系统的定位精度和鲁棒性。
职责和任务:
设计和实现具有语义理解能力的SLAM算法,用于自动驾驶车辆的定位、导航和场景理解。
开发高效的场景识别与匹配算法,解决自动驾驶车辆在弱GPS场景的全局定位问题。
研究并优化匹配算法,提高车辆在复杂环境下的语义匹配、点云匹配精度,及信息融合能力。
进行车端实时的局部语义地图构建,实现对环境的理解和描述,为大规模众源建图提供场景数据。
设计并执行系统级测试,评估算法的性能并提供改进建议。
持续跟踪最新的实时定位与语义SLAM技术和研究前沿,将其应用于公司的自动驾驶项目中。
技能和资格要求:
拥有计算机科学、电子工程、自动化或相关领域的学士或硕士学位。
至少3年以上语义SLAM算法开发经验,具备回环检测和匹配算法开发经验者优先考虑。
精通C++、Python等编程语言,具备良好的编码和调试能力。
具备解决问题的创新能力和团队合作精神。
出色的沟通能力和技术文档编写能力。
加分技能:
曾参与过自动驾驶项目或相关行业的实际部署经验。
发表过与SLAM、语义理解相关的学术论文或专利。
熟悉常见的SLAM库和工具,如GTSAM、Cartographer等。
在深度学习、语义理解或计算机视觉等领域有扎实的背景知识。
[实习]自动驾驶车端定位建图算法实习生
工作地点:北京
职位描述
车端基于多源信息(Lidar/Camera/Radar/IMU/Wheel/矢量)的里程计和建图算法研发;
车端无GNSS场景下的地图定位已量产方案持续优化,问题跟进和解决;
面向新车型,新智驾硬件系统挑战的地图定位/跨模态定位/相对定位的算法研发;
算法的数值计算和工程优化,打造轻量级高效率的车端模块并负责部署量产落地。
职位要求
具备扎实的状态估计、数值计算、C++编程和软件工程能力;
熟悉经典的SLAM算法框架(FastLIO/MSCKF/VINS/ORBSLAM/maplab等)或地图定位(矢量/几何特征/粒子滤波等)方案;
加分项:在SLAM定位建图方向发表过优秀的论文或者做过实际落地项目;强烈的owner和交付意识,热爱智驾和机器人技术。
[实习]自动驾驶地图复杂场景感知实习生
工作地点:上海(优先),北京
职位描述
计算机视觉、深度学习等相关方向硕士以上学历;
熟悉图像2D目标检测、文字识别、图像语义分割、实例分割、BEV感知等至少一个方向相关算法;
参加过至少一个机器学习、深度学习实践项目,有大型模型训练、调优经验;
熟练掌握至少一种深度学习算法库,如TensorFlow,PyTorch等;
动手能力强,扎实的算法实现能力;
良好的沟通能力;有探索新领域、新问题的热情和能力。
职位要求
负责自动驾驶复杂场景下,基于视觉的语义地图要素的感知算法研发;
跟踪国内外前沿的研究成果,并能实现应用于实际项目中;
参与相关项目工程落地。
[实习]智驾融合定位\SLAM\深度学习实习生
职位描述
负责融合感知、Lidar、图像、GNSS、IMU、Wheel等多源信息,解决高速、城区、地库、停车场、服务区等场景的几何定位、拓扑定位和地图构建问题。
执行以下任务之一或多项:
i.利用语义感知等信息实时推理车道、道路级别拓扑。
ii.研究在SD地图上基于语义感知的跨模态几何定位和拓扑定位问题。
iii.探索语义感知在矢量地图上的回环定位问题。
调研深度学习、语义SLAM等最新研究成果,应用learning-based方法解决定位和建图方面的挑战。
协助维护现有方案并进行issue分析,确保系统的稳定性。
整理技术成果,积极参与专利申请和论文发表,推动团队在学术和产业界的创新影响。
任职要求
本科及以上学历。
熟悉计算机视觉、SLAM、深度学习、多传感器融合等至少一项技术。
熟悉相关领域经典算法,如VINS-Fusion、Fast-LIO、SuperGlue、NetVlad、MapTR等至少一种。
熟练使用开源库,包括但不限于OpenCV、Ceres、PyTorch等。
熟练使用C++、Python等编程语言,熟悉Linux系统。
具备出色的沟通能力、自驱力和ownership精神。
[实习]定位/SLAM算法实习生
工作内容:
参与部分车端基础里程计的优化工作。
参与部分车端定位交付软件的评价工作。
参与设计定位数据闭环体系以及搭建工作。
期望的你:
熟练C++,掌握python语言,具备较好的coding开发规范和实现能力;熟悉ROS,Linux;
熟悉常见的SLAM或里程计算法,了解常见开源方案,如LOAM,VINS,MSCKF等;
熟练使用OPENCV, PCL, EIGEN,CERES等开源库;
几何计算基础扎实;熟悉卡尔曼滤波器、非线性优化等算法;
对车端上下游模块、定位交付标准有强烈的学习热情,责任心强,协作意识强,性格皮实;
以上内容均出自【自动驾驶之心知识星球】
自动驾驶之心知识星球,创办于2022年7月份,致力于打造为自动驾驶行业中的 ”黄埔军校“,目前近2400人,聚集了近50+自动驾驶行业专家为大家答疑解惑。
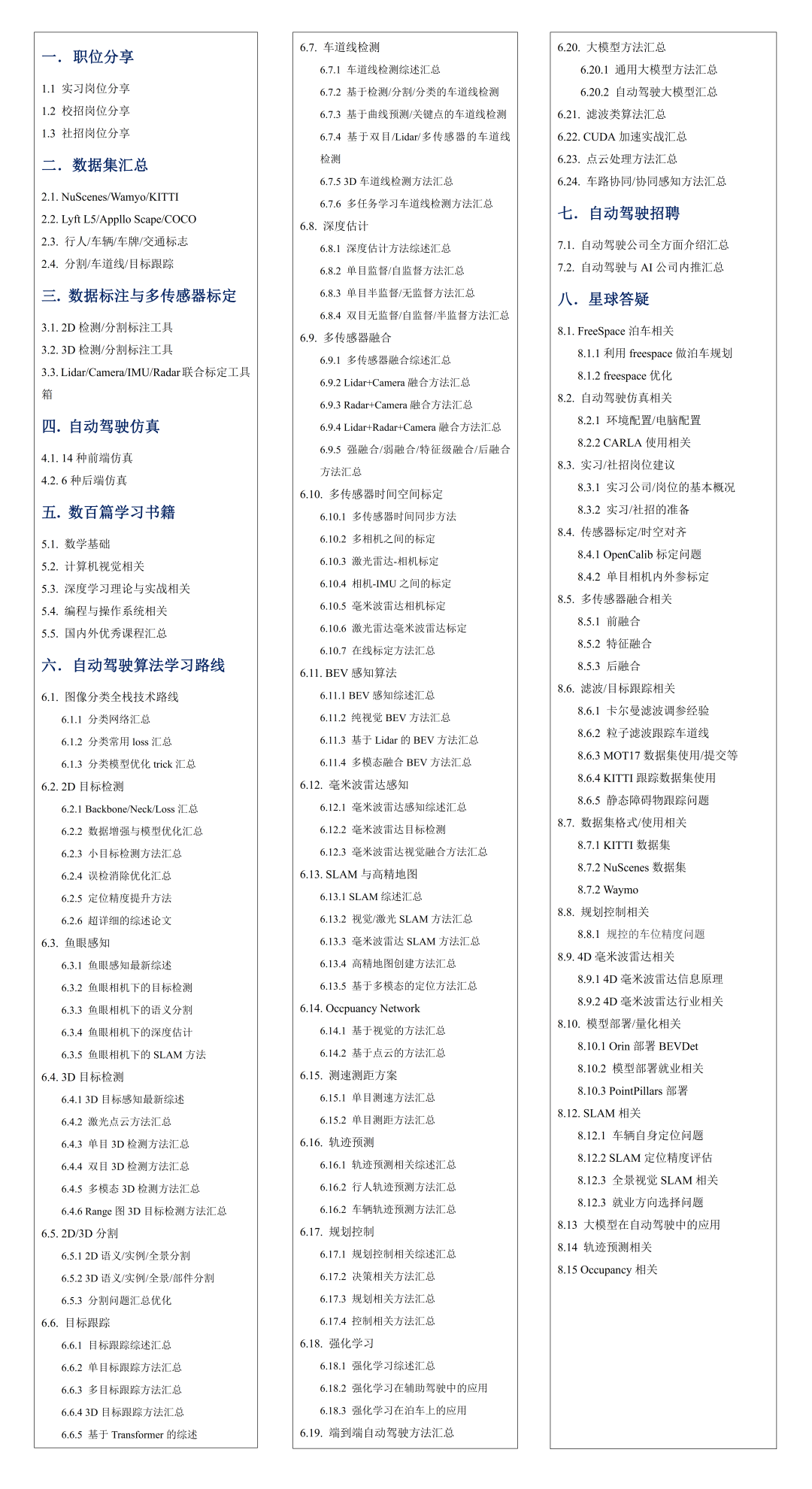
星球内已经打磨出近30+的学习路线,涉及BEV感知、动态/静态障碍物检测、多传感器融合、多传感器标定、目标跟踪、模型部署与cuda加速、仿真等方向,沉淀了大量工程上的解决方案、学术上的优化思路!星球主要内容一览:
如何持续保持跟进和输入呢?我的答案是找对圈子,让你每天能够主动和被动接受很多新的知识,包括领域知识体系的梳理、刷题、面试经验、各家企业现状、各个岗位的具体职责以及后续的职业前景等。一个人入门学习,无异于大海捞针,浪费了大把时间踩坑,还得不到想要的答案。哪里有专业回答的规划呢?这里我推荐一个我们一直在维护的社区:自动驾驶之心知识星球,目前是国内最大、最专业的自动驾驶社区。欢迎加入!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









