






 本文深入介绍了Transformer在语义分割领域的最新模型(如SETR、Segmenter、Segformer、MaskFormer和Mask2Former),探讨了它们的原理、优势和应用前景,以及与传统方法的比较。同时,还提供了科研资源和专家指导,包括84篇相关论文和来自顶会审稿人的深度解析直播课程。
本文深入介绍了Transformer在语义分割领域的最新模型(如SETR、Segmenter、Segformer、MaskFormer和Mask2Former),探讨了它们的原理、优势和应用前景,以及与传统方法的比较。同时,还提供了科研资源和专家指导,包括84篇相关论文和来自顶会审稿人的深度解析直播课程。
掌握SETR、Segmenter、Segformer、MaskFormer和Mask2Former等基于Transformer的语义分割模型的结构和应用;
深入了解基于Transformer的语义分割算法的发展历程和原理;
理解Transformer在语义分割中的优势及其主要思路;
分析基于Transformer的语义分割模型在各领域的应用前景。
研梦非凡3月25日19:20邀请顶会顶刊审稿人985博士Leo导师,深度解析《基于Transformer的语义分割算法》。扫码找助教预约直播,再领84篇基于Transformer的语义分割相关论文。

84篇基于Transformer的语义分割相关论文(部分展示),还有专属粉丝福利!

语义分割性能的好坏取决于网络感受野的大小,全卷积网络中的有效感受野是有限的,进而也就限制了网络性能的进一步提升。而Transformer的能够保持输入和输出空间的分辨率不变,并能够有效捕捉全局的上下文信息,将其应用到语义分割中必然也会带来相当的进步。
直播课内容概览
语义分割简介
语义分割的重要性及应用领域
传统语义分割方法综述
Transformer在计算机视觉中的应用概述
SETR (SEgmentation TRansformer) 算法原理及优势
SETR的主要思路和结构解析
Segmenter: 基于Transformer的语义分割模型介绍
Segformer: 结合Transformer的语义分割模型详解
MaskFormer: 利用Transformer进行实例分割的模型讲解
Mask2Former: 将掩模分割与Transformer结合的模型解析
Transformer在语义分割中的优势与特点总结
SETR、Segmenter、Segformer、MaskFormer和Mask2Former比较与对比
基于Transformer的语义分割的未来发展趋势
实例分割与语义分割的区别与联系
基于Transformer的语义分割的挑战与应用前景
扫码找助教预约直播

再领84篇基于Transformer的语义分割相关论文,还有粉丝福利!

主讲导师介绍
Leo导师
【个人成就】某著名研究院前研究员,同时拥有丰富的工业界经历。
【研究领域】为计算机视觉中的语义分割,自动驾驶三维感知,遥感图像处理,持续学习等。
【科研成果】A类trans期刊发表论文4篇,发表CCF-A/B论文10余篇。担任CVPR、ECCV,AAAI,IJCAI,ACM MM,TCSVT,TGRS,ICASSP,ICPR等会议和期刊的审稿人。
【指导经验】指导多位学员发表了超过10篇论文。
【招收学生方向】计算机视觉中的语义分割,自动驾驶三维感知,遥感图像处理,持续学习,主动学习,领域自适应,弱监督分割等。
扫码找助教预约直播

再领84篇基于Transformer的语义分割相关论文,还有粉丝福利!

ps:研梦非凡做前沿直播,主要是教会大家如何读论文时候抓住重点,从实际读论文的过程中,让大家掌握有效的方法,发现找创新点和写论文阅读报告的能力。
自动驾驶之心的粉丝如果你的研究包括以下方向/方法,或者有你感兴趣的idea,可以享受粉丝福利(1v1论文指导选题阶段学习规划部分先meeting后付款,具体活动可扫码咨询助教)
自动驾驶研究方向
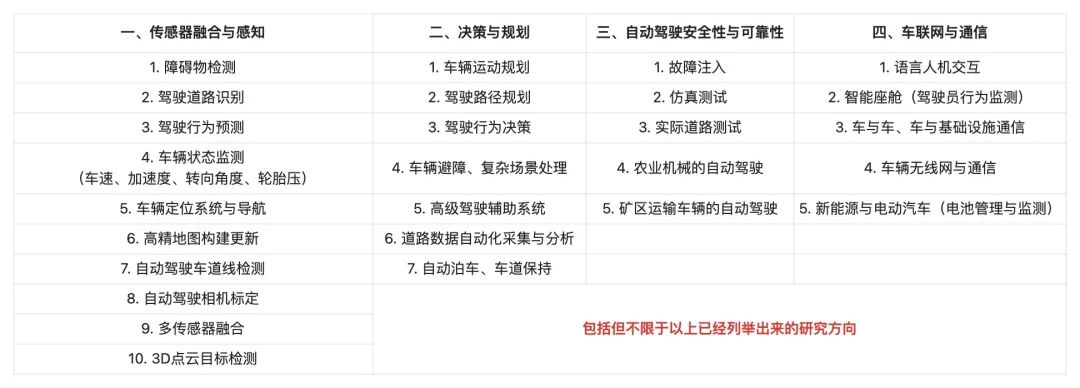
自动驾驶方向科研常用方法

自动驾驶方向现准备好的idea
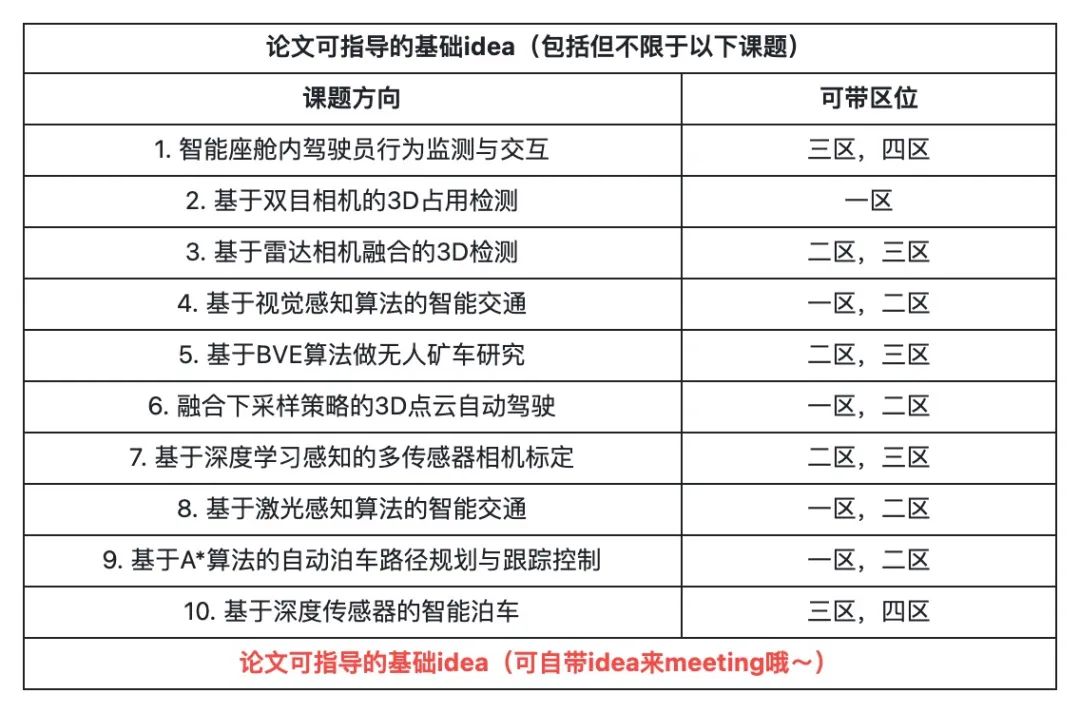
你的研究方向/方法/idea可以不限以上自动驾驶方向,cv全方向/nlp全方向/机器学习/深度学习都可以来研梦非凡匹配到合适的科研指导。
粉丝福利:1v1论文指导-选题阶段-学习规划部分(先meeting后付款),具体活动可扫码咨询助教👇

根据自动驾驶之心粉丝的科研需求我们推出两种论文指导方案
1v1定制化论文指导
按不同的需求收费,区别于其他1v1论文辅导收全程指导费。
针对在完成论文的过程中某些部分遇到难题,而找不到路径的同学,协助其用更少的费用快速地解决问题。
1v1定制化论文指导分三个阶段:
选题阶段
导师根据学员实际情况与需求,引导论文idea或给出论文idea
导师针对已有研究成果进行梳理和分析指导,让学员了解研究领域的发展状况、研究方法和趋势,确定论文idea的研究方法和目标。
导师结合己有研究成果的情况和论文idea,对学员后续的研究方法做出初步的规划和判断。

实验阶段
实验设计,明确研究问题、研究目标和研究方法
数据收集、整理与分析,确保数据的质量和完整性
实验代码实现与模型训练
实验微调与结果统计、呈现
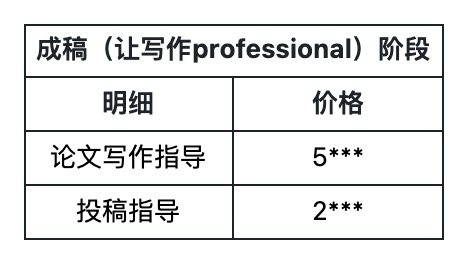
成稿(让写作professional)阶段
因语言问题,科研协作经验缺乏,大多数的同学会因为用词和表达不够professional而被误解,导致论文改稿和评分低。
论文写作方法指导,论文写作框架与格式
参考文献筛选与列举
期刊会议筛选与投稿建议指导
论文文字部分的修改与润色
论文中所必要的表格与图片制作
粉丝福利:1v1论文指导-选题阶段-学习规划部分(先meeting后付款),具体活动可扫码咨询助教👇

1对1全程论文指导
全程论文指导的服务适合以下需求的同学
非常适合科研小白:有科研需求,想融会贯通地使用算法模型,了解前沿进展和方向;
非常适合转专业和研究领域做敲门砖用:从事人工智能领域工作,想系统提升算法理论,高效掌握算法设计及创新思路,快速了解论文撰写技能;
课程收获
学习经典前沿论文,掌握算法原理和实现,了解不同算法的优劣势;
指定领域创新点;
Coding能力增强;
论文写作方法以及投稿建议。
科研进度保障
主讲导师:顶会审稿人,负责经典论文+前沿论文讲解+idea给予/方向建议+写作方法+投稿建议
私人群:每个同学都有与主讲导师私人讨论的小群(idea探讨以及课程内容答疑);
全程线上语音meeting+开麦沟通。
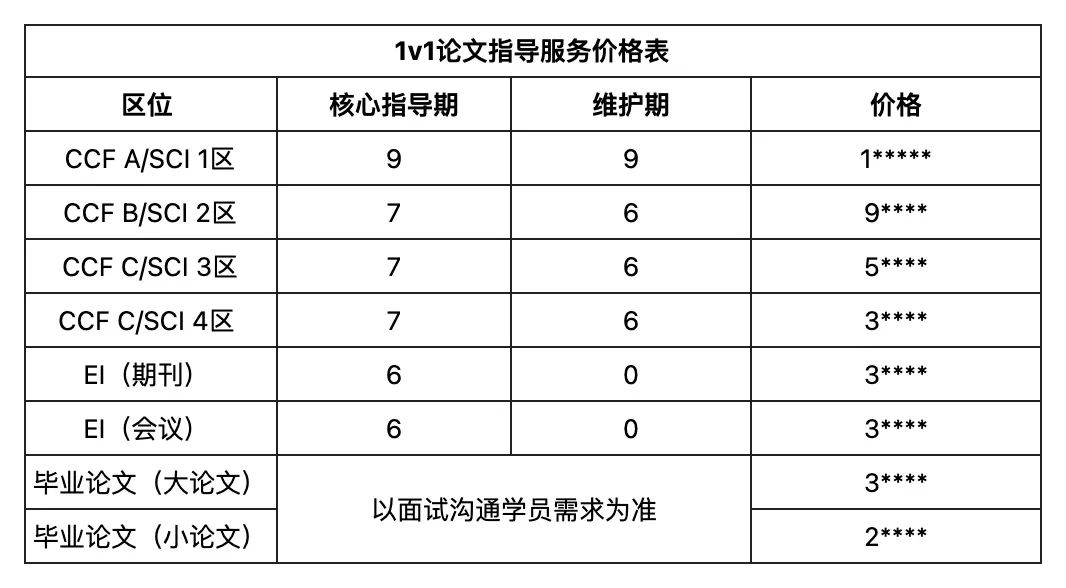
指导周期与价格表
总指导周期=核心指导期+维护期
根据需要发表论文的区位不同,指导总周期在3到18个月不等。
核心指导期是正常的上课指导周期,维护期是学员已经写出论文投出去后,可能会收到审稿意见要求修改或者退稿的情况(主讲导师会给同学进一步的修改建议,必要的话会约会议沟通,最多6次meeting)。
在核心指导期,一般是每周1次1对1会议指导课,每次在45分钟左右。
粉丝福利:1v1论文指导-选题阶段-学习规划部分(先meeting后付款),具体活动可扫码咨询助教👇

导师介绍
研梦非凡的导师来自海外QStop80、国内华五、C9、985高校的教授/博士导师/博士后,世界500强公司算法工程师,国内外知名人工智能实验室研究员。(以下仅展示部分导师)导师均来自科研一线,购买联系助教后,可根据学员需求匹配导师库导师~~
李导师
海外QS30大学博士后,曾在多家研究院企业担任算法研究员。只接顶会、一区、二区意向学员
个人成就:
在顶级国际会议及期刊Environment of remote sensing,AAAI,ECCV,WACV等发表论文20余篇。专利著作7部。担任CVPR,ICCV,ECCV,ACM-MM,AAAI,NIPS等审稿人。
研究/辅导方向:
计算机视觉,机器学习,多模态学习。3D视觉(3D点云和图像表示学习、3D点云和2D图像的无监督和半监督学习、人体姿态估计、重建);人脸分析(人脸关键点、重建、人脸跟踪);模型压缩 (知识蒸馏、模型搜索量化剪枝);通用视觉模型与应用(VIT、目标检测、语义分割);AI基础理论(AutoML、数据增广、无监督/半监督/长尾/噪声/联邦学习);AIGC生成模型高效训练和优化(扩散模型蒸馏、图文生成、3D生成等);多模态学习(图像、3D点云和语言的多模型学习、vision-language、医学图像);压缩感知的稀疏编码方法。
Mike导师
浙大博士,现任互联网大厂算法研究员,从事包括自动驾驶多模态感知系统,监控视频理解系统等项目。
个人成就:
在中科院一区二区等国际期刊发表论文近15篇,并担任cvpr,iccv, eccv, nips, icml, iclr等审稿人。
研究/辅导方向:
目前主要方向为深度学习视觉方向,生成模型方向(如GAN网络,diffusion,文生图等),视觉理解方向(如目标检测,分割,对比学习,模型结构设计等),多模态理解方向(如视觉和语言,声音等),3D点云,医疗图像领域,模型结构设计和计算机视觉在医疗上的应用等。
辅导亮点:
指导多名本硕学生撰写SCI 1区-4区学术论文,多名学生进入顶尖985高校、211高校双一流学科继续深造。
Bob导师
本硕博985
个人成就:
在TPAMI、TIP、CVPR、ICCV、ECCV等高水平期刊和会议上发表论文40余篇,其中CCF-A类论文20余篇,一作CCF-A类论文10余篇。
研究/辅导方向:
主要研究方向为图像复原、图像增强、神经网络轻量化、点云语义理解等。
辅导亮点:
先后指导硕士博士20余人,多名学生硕博期间发表CCF-A和CCF-B,SCI一区和SCI二区。
Wills导师
985高校通信与信息PHD
个人成就:
曾在某知名lab任研究员,多个SCI国际会议审稿人,IEEE Acecess审稿人。
研究/辅导方向:
机器人slam、无线感知、多模态融合、计算机视觉、大数据、云/雾计算、通信类、机械类。
辅导亮点:
曾辅导过数位硕士博士的毕论与本科生保研加分,对论文创新点挖掘具有丰富经验,目前已经发表数十篇SCI高水平论文。参与申请与开展国家级别课题数项(其中部分项目是实际负责人)。
李导师
BAT大厂算法专家
个人成就:
ACM multimedia oral论文一作。曾带队做过图像风格转换、图像/视频增强、人脸修复、图像/视频质量评价和自动驾驶感知数据合成等项目,对生成式模型有着丰富的实践经验。
研究/辅导方向:
主要研究方向为图像视频增强、多模态内容理解与数据合成,自动驾驶感知数据合成。
辅导亮点:
经验丰富,实力过硬,帮助50多名学员完成1v1定制化论文指导(实验阶段工作)
粉丝福利:1v1论文指导-选题阶段-学习规划部分(先meeting后付款),具体活动可扫码咨询助教👇




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









