






作者 | BUAA火车侠 编辑 | 汽车人
原文链接:https://zhuanlan.zhihu.com/p/606269242
点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
本文只做学术分享,如有侵权,联系删文
21年中开始,在毕业三年之后,开始围绕自动驾驶构建自己的知识体系,到目前为止不到两年。总的来讲,看的东西不算少,形成深刻记忆的少一些,通过实践内化为自己能力的则更少。能清晰地感觉到,和其他从业者之间知识深度、广度存在差距,写的东西也都是些没太多深度的小白类文章,我也感觉很惭愧。但毕竟前几年落下很多,现在还处于补课的阶段,慢慢来吧。
一些数学性很强的东西都是纸质笔记,一些理论性没那么强的东西我发在了知乎上。
读书时其实对学习知识的兴趣没那么大,后来更是被眼病搞得失去了学习动力。有意思的是,27岁之后又开始对知识产生了浓厚的兴趣。出于种种原因,我在这个行业里的位置仍然不高,仍然是一个比较蹩脚的“产品经理”,这种背景下,兴趣是支撑我前进的最大动力。
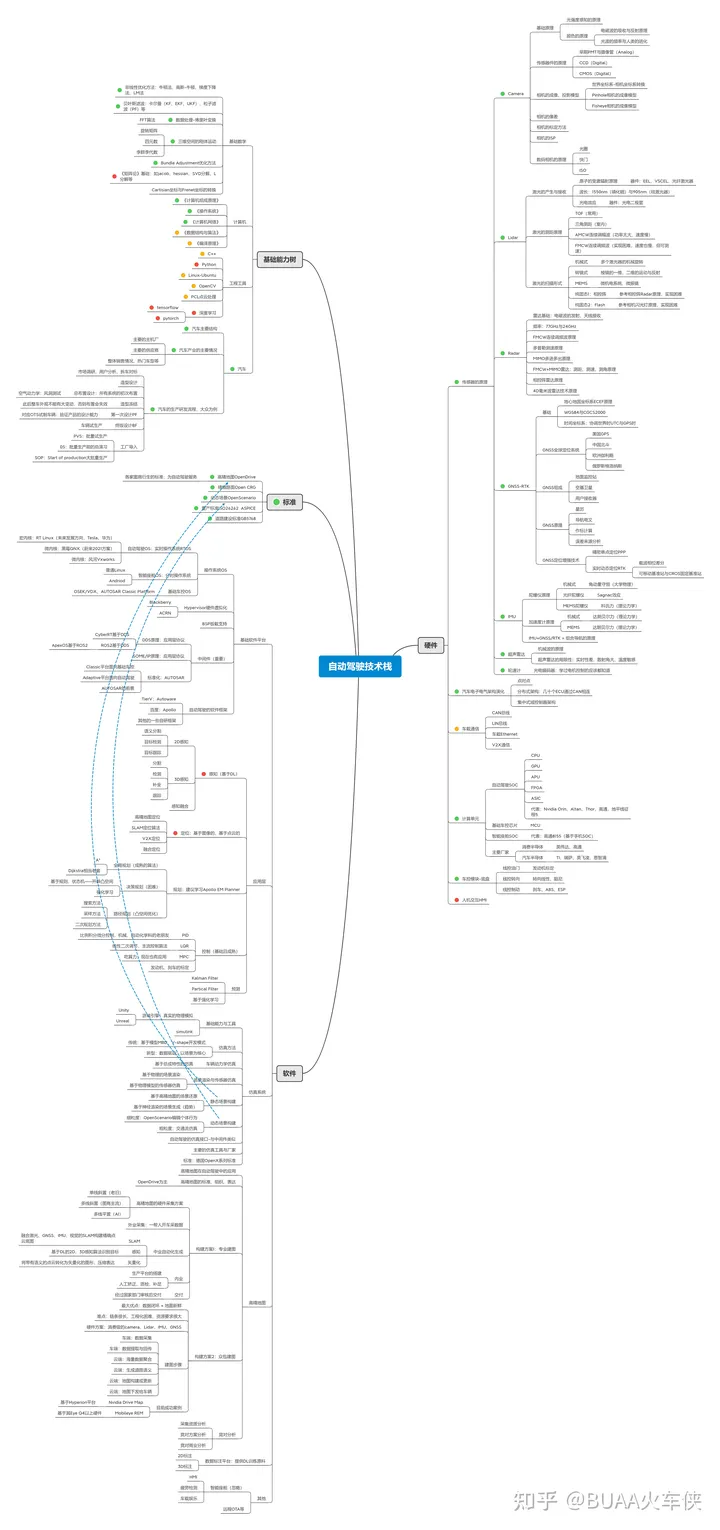
用Xmind整理了一下自己这几年的知识树,知乎的图片不够高清,后面也会用文字表达一下。一些还没有学,但想要了解得内容,也会列出来。总体感觉就是知识一直不够用,学习的时间和精力也是不够用。虽然心急,但能咋办?学吧,学无止境,太深了~
1. 学科基础
1.1 数学(没有太多实践,学过后忘得多,但能有基本概念)
最优化方法:基础概念,梯度下降(最速)、牛顿法、拟牛顿(DFP、BFGS)、高斯牛顿、LM,拉格朗日,KKT等
概率统计:贝叶斯理论 ->BF、KF、EKF、UKF、PF
矩阵论基础(研究生学过,忘了很多,重点关注基础概念、QR、SVD等);
傅里叶变换原理;
Cartisian坐标与Frenet坐标的转换;
1.2 计算机(浅薄,记忆不深刻)
《计算机组成原理》
《操作系统》(了解车载OS)
《计算机网络》(了解车载网络通信相关)
《编译原理》(一知半解)
《数据结构与算法》(没力气看,有空再说)
1.3 深度学习与图像处理算法基础
《统计学习方法》
《冈萨雷斯:数字图像处理》
主流深度学习方法、论文(待学习)
1.4 SLAM算法(知识基本局限于《14讲》)
三维空间的刚体运动:旋转矩阵、四元数、李群李代数;
前端odometry;
后端优化方法:BA、KF、EKF等
回环检测的概念与方法:基本概念;
主流点云registration算法:ICP、NDT等;
主流的SLAM算法:ORB、LOAM系列、LIO、VIO、R3Live的基本原理(待了解);
1.3 工程工具(浅尝即可,个人岗位也不大需要,需要有一个基础概念即可)
C++(硕士写过,已经忘)
Python(硕士写过,已忘)
Linux系统
OpenCV
PCL点云处理
Eigen
深度学习:Pytorch
1.4 智能化汽车的原理
自动驾驶感知硬件原理(工作中有所实践,记忆更深刻一些);
自动驾驶执行层的线控底盘技术原理(组车辆时候用到);
1.5 汽车&自动驾驶产业相关
主要整车厂及其产出车型,车型的自动驾驶的能力;
主要自动驾驶厂商及其能力
OEM的整车研发流程(限于德系OEM,第一份工作带来的经验);
2. 智能汽车基础软件架构
2.1 汽车OS(仅限于了解概念)
自动驾驶域:实时操作系统OS:宏内核的RT Linux、微内核的QNX
座舱域:Linux、Android;
基础车控:OSEK\VDX、AUTOSAR CP
Hypervisor硬件虚拟化:Blackberry、ACRN
BSP板载支持
2.2 中间件(大部分限于概念,CyberRT有所学习)
DDS通信原理:应用层协议,需要了解CyberRT、ROS2
SOME/IP原理:应用层协议。
标准化中间件:AUTOSAR AP面向自动驾驶,CP面向基础车控
2.3 自动驾驶框架(待了解)
Apollo
3. 自动驾驶算法原理
3.1 车端感知
BEV原理
Occupancy Network基础原理
3.2 定位
基于高精地图匹配的定位(淘汰);
基于GNSS的定位;
主要的融合定位方法(KF、BA);
3.3 规划
全局规划:A* 、Dijkstra
决策规划:基于规则——开辟凸空间,基于强化学习
路径规划(凸空间优化):搜索、采样、二次规划
EM Planner(Expectation Maximum算法)
3.4 控制
PID-比例积分微分:工科生的老朋友;
LQR:线性二次调节,主流控制算法;
MPC(待了解)
3.5 预测(完全没概念)
4. 自动驾驶仿真系统
调研比较充分,实践局限于围绕HDmap的数据采集和静态场景搭建;
5. 导航电子地图
练习时长一年半,了解相对多一点点。
6. 标准类
自动驾驶仿真相关标准:
高精地图、静态仿真场景OpenDrive(地图、仿真都有用)
精细化路面建模、仿真OpenCRG
动态仿真场景OpenScenario
中国道路建设标准GB5768(地图、仿真场景都有用)
功能安全相关标准:ISO 26262,ASPICE(知之甚少,应该需要量产项目才能有深刻认识)
政策法规相关标准:主要是国内自动驾驶开发的法规,需要脱敏;
7. 产品设计能力
路子比较野,专业性待提高。产品经理的方法论需要建设。
投稿作者为『自动驾驶之心知识星球』特邀嘉宾,欢迎加入交流!
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、大模型与自动驾驶、Nerf、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

② 国内首个自动驾驶学习社区
国内最大最专业,近2700人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型、端到端等,更有行业动态和岗位发布!欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦2D/3D目标检测、语义分割、车道线检测、目标跟踪、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、在线地图、点云处理、端到端自动驾驶、SLAM与高精地图、深度估计、轨迹预测、NeRF、Gaussian Splatting、规划控制、模型部署落地、cuda加速、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









