






 自动驾驶之心团队意识到对于零基础学习者的挑战,推出了一系列面向小白的入门教学视频,涵盖代码学习、算法解析、工业应用等内容,提供1对1答疑支持,帮助学员少踩坑,实现知识体系的建立和实践能力的提升。
自动驾驶之心团队意识到对于零基础学习者的挑战,推出了一系列面向小白的入门教学视频,涵盖代码学习、算法解析、工业应用等内容,提供1对1答疑支持,帮助学员少踩坑,实现知识体系的建立和实践能力的提升。
老粉知道,平时自动驾驶之心的文章主要是我们团队自己在输出。习惯性地带着自己的经验和角度去解读一篇文章,默认读者是有一定基础的。后来我们一直在反思这个事情,这会导致一个问题,非常多的小伙伴是零基础入门自动驾驶,甚至是零基础入门深度学习,还有很多人是转行跨行而来。于是我们后台收到了越来越多的私信咨询:网上资料太多太乱了,有没有整理好的入门学习资料?标定有问题,大佬们帮忙看看?BEV感知太复杂了,有没有快速入门学习的视频?
初期自动驾驶之心一个个和小伙伴们私聊解惑,但这种方式长期来看太低效。于是团队萌生了一个想法:能不能做一些面向小白入门的教学视频呢?想到就去做!一晃一年推出了二十多门课程!也收获了非常多的鼓励和建议,像BEV感知的柒柒老师、TensorRT的韩博、规控的宁老师~他们不仅仅是在做一门课程,更多的是传递:如何去学习?如何去思考?如何去成长?这和我们团队的精神完美契合!未来自动驾驶之心在课程这块还会持续发力,把对行业的思考和理解转化成实实在在的东西。这个行业需要什么?从业人员需要什么?未来需要什么?我们希望2024年走在正确的道路上!
依然是那个老生常谈的话,现在是最好的时代,也是最坏的时代。有能力的同学能够快速捕捉行业风口乘风破浪;能力还在提升的小伙伴仍旧会感到吃力,如果没有强大的团队支撑,个人的成长极其缓慢。在校生依赖实验室资源,没有导师知道,没有算力支持,可谓步步维艰;已经工作的同学,受限于当前工作安排,想转行却不知如何下手,到处踩坑。
微信扫码学习所有课程

如何开启学习,少踩坑?
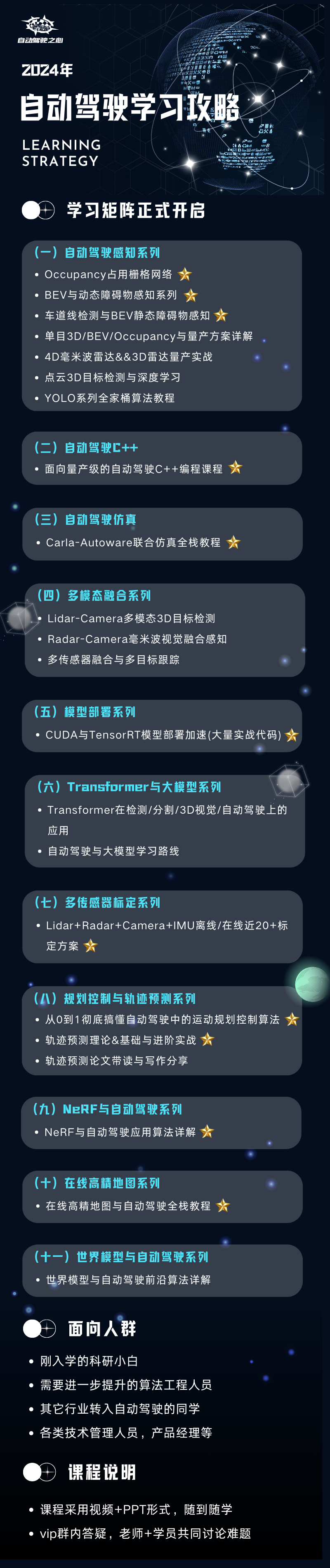
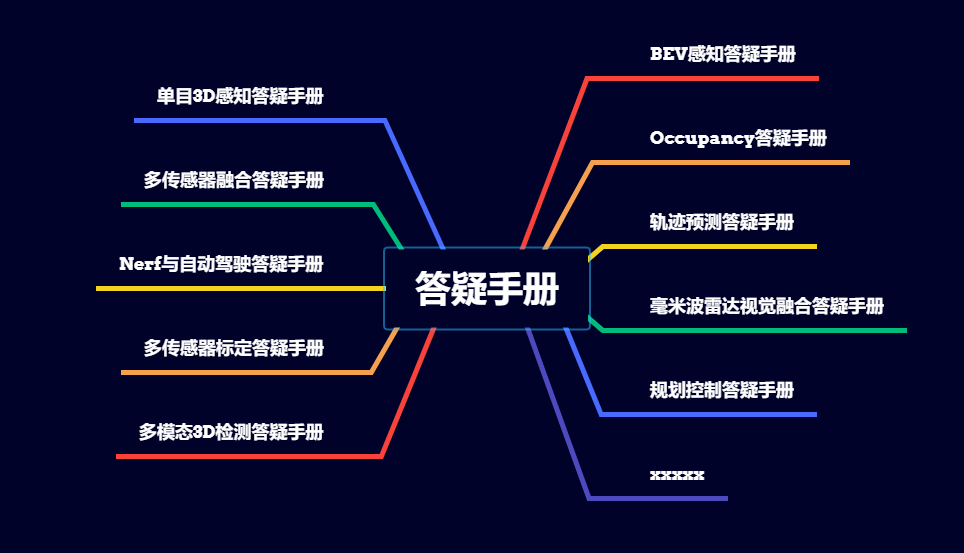
自动驾驶之心一直想要做这样一个桥梁,对接工业界和学术界,真正让大家学有所得,知其然,必知其所以然。今年自动驾驶之心一直努力给大家开创新的课程和思路,第一时间掌握工业界和学术界最有价值的内容(下面将会从代码学习、算法学习、工业应用、群内交流答疑几个方面介绍我们究竟是怎么做好这件事情的),也欢迎大家加入我们一起,踏踏实实学点东西。学习矩阵一览:
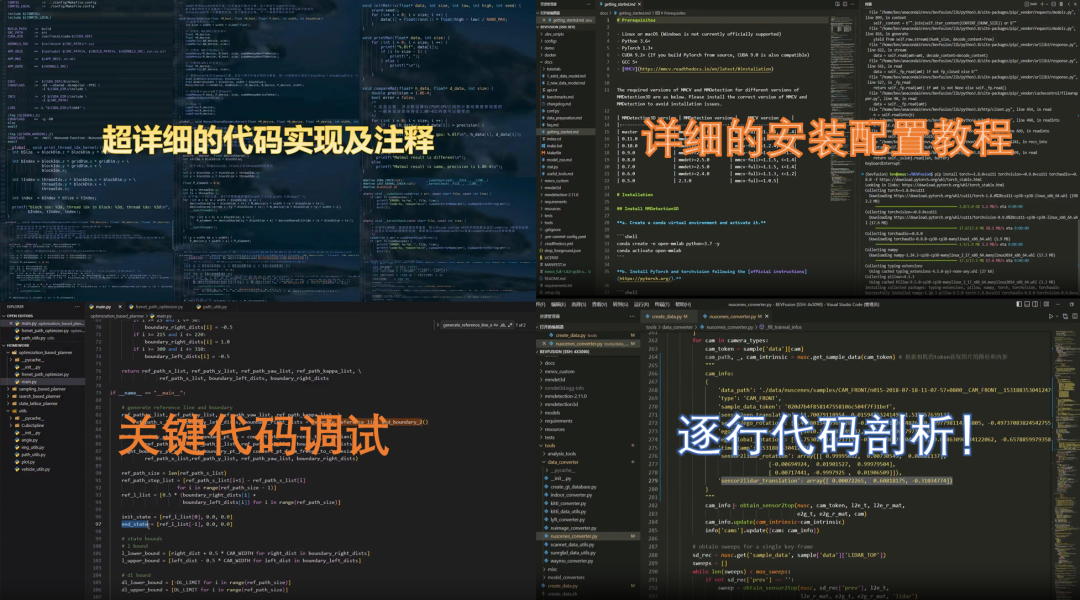
关于代码,自动驾驶之心做到了从安装配置到逐行代码剖析、关键代码调试、核心代码注释,真正能让学员看懂、安装明白。如果你是小白或者转行人员,不知道怎么高效学习代码,千万不要一个人硬扣,踩坑浪费的时间太不值得了。
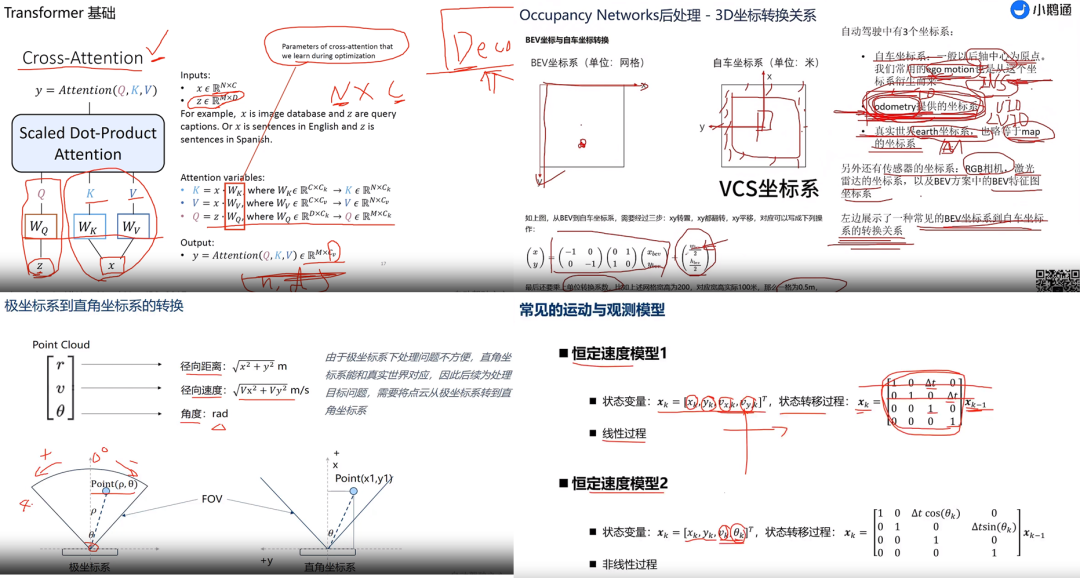
关于算法学习,这一直是难度最大、也最枯燥的部分,我们从一开始就考虑到了这个问题,主打PPT算法展示+手动推导模式,从零带着大家真正搞懂每个公式的缘由,以及如何运算得出结果,从来不把僵硬的公式扔给大家,逐层拆分,让同学们真正理解。
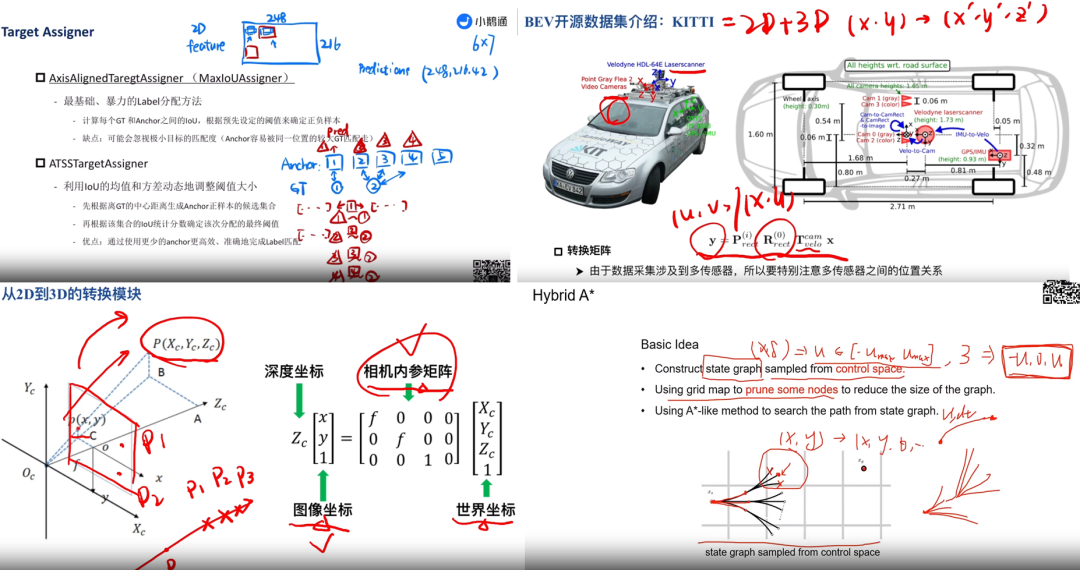
除此之外,课程还设置了丰富的Demo、量产场景等,真正让大家从直观的角度上理解,我们直接选取工业界使用的方案,从数据标注、传感器标定、以及数据制作、模型部署等多个任务为大家展示量产如何去做、项目如何去开发。

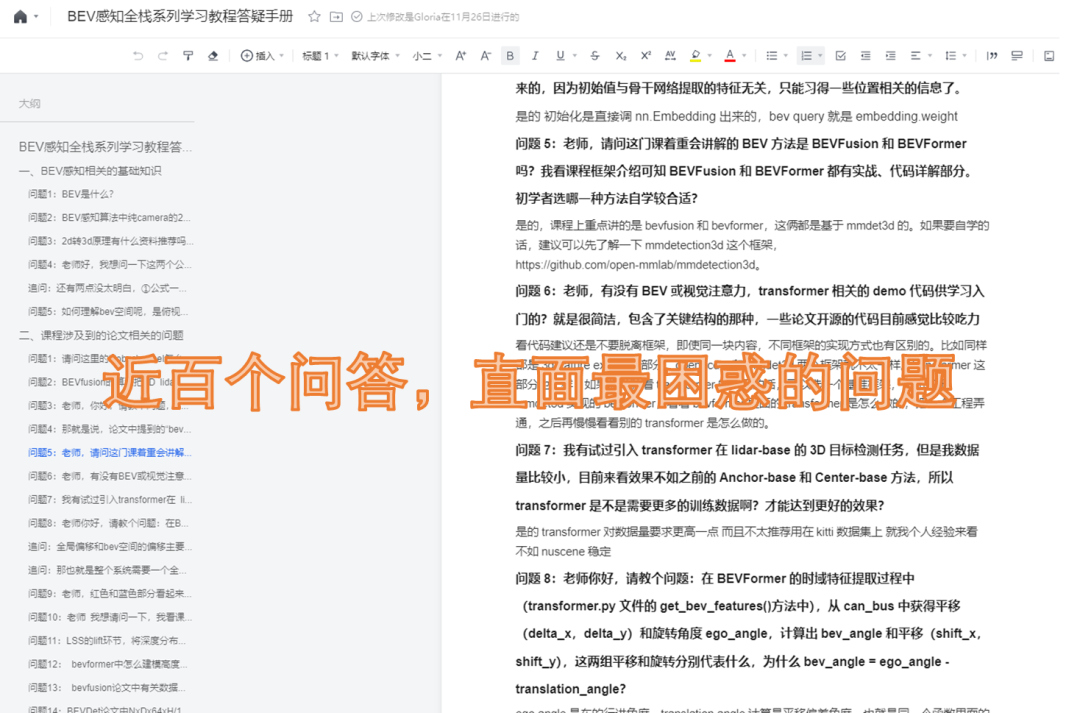
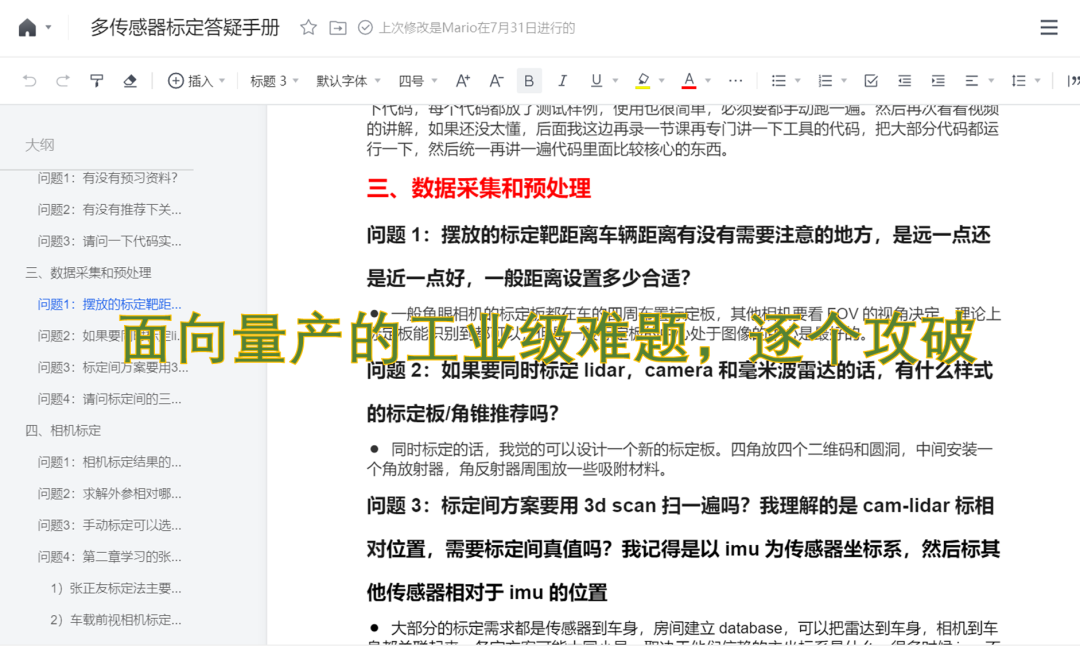
关于群内交流答疑,我们实现了1vs1对话交流,每门课程都配置有答疑手册和课程助理,支持24小时群内交流学习,我们把同学们踩过的坑都记录下来,温故而知新。
哪个适合自己?如何搭配?
上面的各类学习路线包含了感知、定位、融合、规控、Nerf重建、大模型等多个方向,既有很多工业界可以直接使用的教程,也有很多面向学术界research的方案,我们也为大家做好了归纳,不管是正在进行科研,有论文需求的同学,还是直接想把方案落地使用的算法工程人员,都能受益。
1) 科研类同学
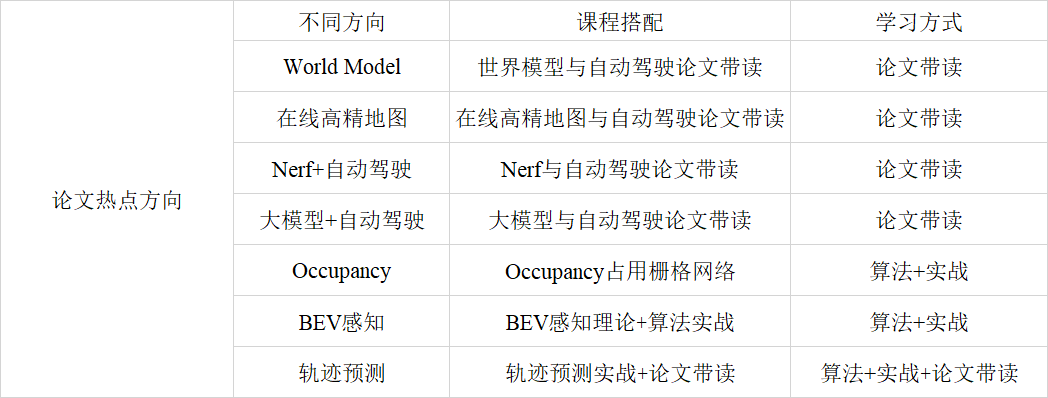
如果你还正处于科研阶段(在校的硕士、博士),苦于不知道如何发表论文、确定方向,我们已经将今年和下一年的主要方向做了盘点和归纳,下一年的坑都在里面了:
2) 工业界同学
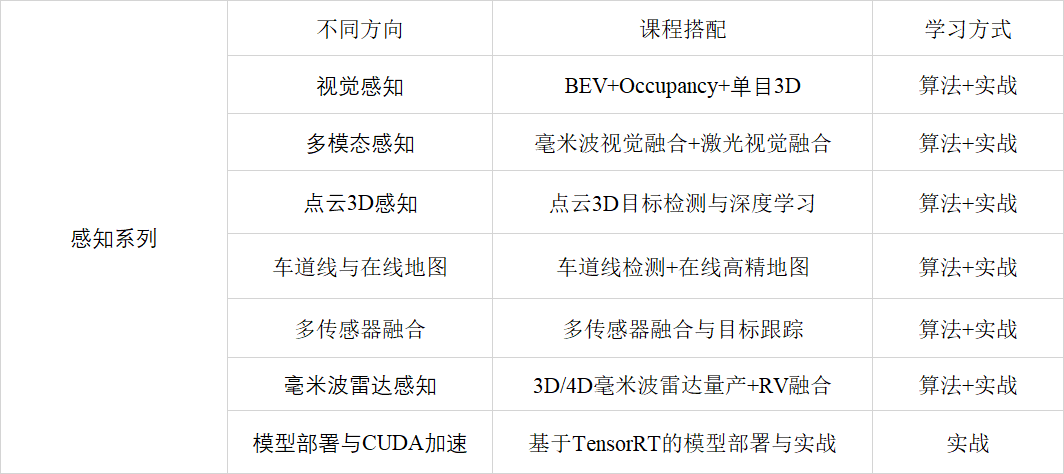
如果你是感知方向,更加面向量产,自动驾驶之心在纯视觉感知、多模态感知、点云3D感知、车道线与在线地图、多传感器融合感知、毫米波雷达感知、模型部署等多个方向为大家准备好了学习路线:
如果你是规划与预测方向,我们同时针对工业界和学术界展开了实战和论文讲解:

3) 新兴方向
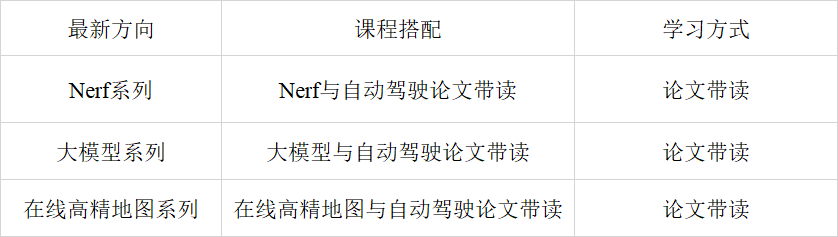
自动驾驶之心更是针对目前最新的Nerf、大模型、在线地图等多个主流方向,为大家梳理了一套系统的学习课程:
4)仿真测试
自动驾驶的量产上车,离不开仿真测试的闭环链路。仿真技术不仅可以提供更全面的测试覆盖率,还能在安全的环境中加速算法的开发和验证,从而有效提高自动驾驶系统的整体性能和可靠性。为此我们推出了Carla-Autoware联合仿真全栈教程:

5)自动驾驶C++
而C++是自动驾驶中最广泛使用、重要性最高的语言,只靠python行走江湖的时代彻底结束了!C++是算法人员和开发人员必备的技能,也是量产的基石,永远绕不开的工具。

学习入口-->

微信扫码,学习所有课程

添加小助理,咨询更多


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









