






点击下方卡片,关注“自动驾驶之心”公众号

CVPR 2025 DriveX研讨会聚焦于基础模型与V2X(车联网)协同系统的融合,旨在提升自动驾驶车辆在感知、规划与决策方面的能力。传统的单车智能系统在3D目标检测等任务上已取得显著进展,但全域场景理解与3D占用预测等新兴挑战仍需更全面的解决方案。
协作式驾驶系统通过V2X通信和道路基础设施的支持,扩展了车辆的感知范围,提供了危险预警,并通过数据共享提升了决策能力。与此同时,像视觉-语言模型(VLMs)这样的基础模型具备强大的泛化能力,能够实现零样本学习、开放词汇识别以及对新场景的语义解释。以DriveLLM为代表的端到端系统与基础模型的最新进展,也为自动驾驶系统带来了新的突破。
本次研讨会旨在汇聚行业专家,共同探讨这些前沿技术,应对关键挑战,推动智能驾驶发展,提升道路安全水平。
自动驾驶之心对本次workshop挑战赛进行了赞助!为自动驾驶届优秀人才提供更多激励与支持!
研讨主题(Topics)
协作式自动驾驶与智能交通系统中的基础模型
用于交通场景理解的视觉-语言模型(VLMs)
大语言模型(LLM)辅助的协同系统
面向自动驾驶的通信高效的协同感知技术
高效智能的车联网(V2X)通信技术
自动驾驶中的数据集构建与标注方法
基础模型与协同感知的数据集与评测基准
弱势道路使用者(VRUs)的3D目标检测与语义分割
3D占用预测与场景理解
端到端感知与实时决策系统
车路协同(V2I)交互技术
自动驾驶中的安全性与标准化问题
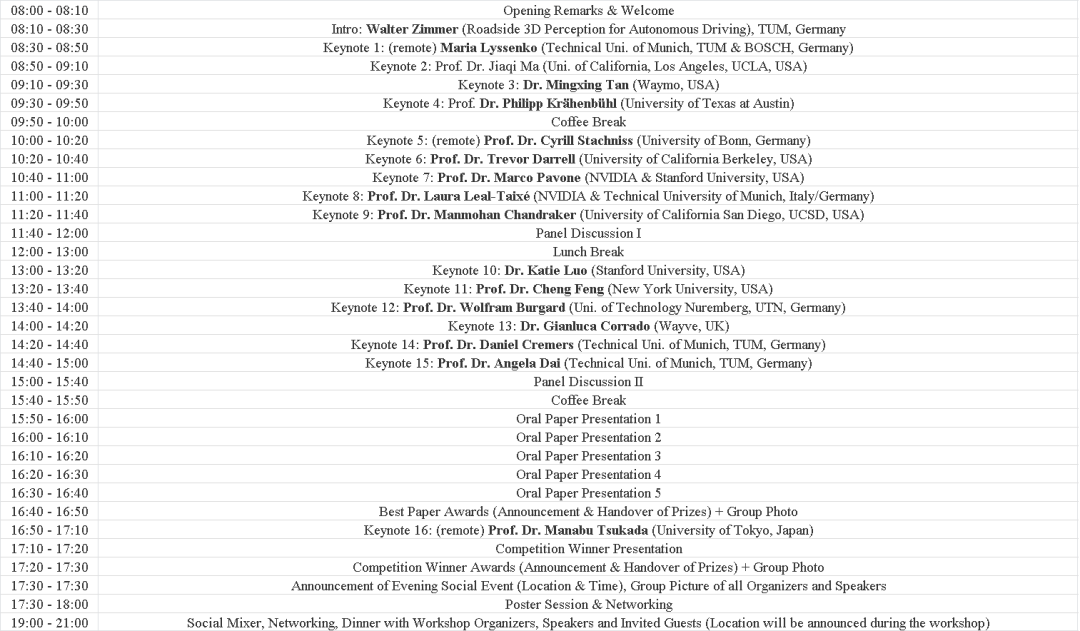
日程
📅 时间地点 :2024年6月12日|美国纳什维尔
主要发言人
论文投稿信息(Paper Track)
目前已全部完结!
接受以下两类投稿:
完整论文 :8页(不含参考文献),将收录于会议论文集
扩展摘要 :4页(不含参考文献)
❝⚠️ 投稿须使用CVPR 2025官方LaTeX或Typst模板(完整论文为必选项,扩展摘要建议使用相同模板)。
🔗 投稿平台 :OpenReview
https://openreview.net/group?id=thecvf.com/CVPR/2025/Workshop/DriveX#tab-your-consoles
⏰ 重要时间节点 :
投稿系统开放时间:2025年2月26日
论文摘要提交截止时间:2025年3月25日(美国太平洋时间 23:59)/3月26日(格林尼治时间 23:59)
论文提交截止时间:同上
通知作者结果时间:2025年3月31日
最终录用版本提交截止时间:2025年4月7日(格林尼治时间 23:59)
论文奖项
为优秀投稿论文设立以下奖项:
最佳论文奖 :奖金 500 美元 💰 + 荣誉证书 📜
最佳学生论文奖 :奖金 300 美元 💰 + 荣誉证书 📜
最佳应用论文奖 :奖金 200 美元 💰 + 荣誉证书 📜
欢迎广大研究者踊跃投稿,争夺荣誉与奖励!
🏆 挑战赛介绍(Challenge)
我们将在本次研讨会中举办为期10周的挑战赛 ,基于 TUMTraf V2X 协同感知数据集 (CVPR’24),https://tum-traffic-dataset.github.io/tumtraf-v2x/
该数据集包含高质量、真实场景下的V2X协同感知数据,专注于自动驾驶中的协作式3D目标检测与跟踪任务 。
🔗 数据集地址:https://innovation-mobility.com/en/project-providentia/a9-dataset/#anchor_release_4
🛠 我们还提供了完整的开发工具包(Dev Kit),https://github.com/tum-traffic-dataset/tum-traffic-dataset-dev-kit
方便您加载、预处理、可视化和评估模型性能。
📦 TUMTraf V2X 数据集亮点:
来自车载与路侧传感器的9种传感器同步采集数据
包含2,000个标注点云 和5,000张标注图像
共计30,000个带追踪ID的3D边界框
覆盖多种复杂交通场景 :如近碰撞事件、交通违规、超车与U型转弯
提供高精地图 (HD Maps)
使用国际标准格式 OpenLABEL 进行标注
配套开发工具支持数据加载、预处理、可视化、标签转换与方法评估
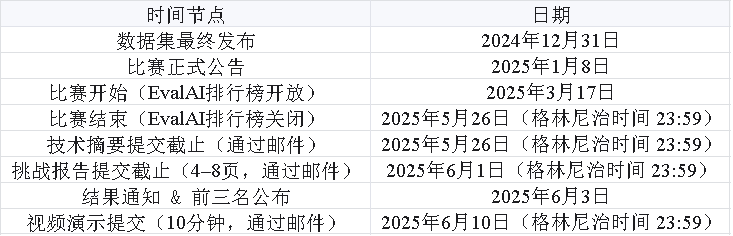
🗓️ 比赛时间安排:
📊 评估指标说明:
Precision(精确率) :正确检测对象占总检测数的比例,衡量正样本预测准确性
Recall(召回率) :正确检测对象占实际所有对象的比例,衡量模型找出所有相关目标的能力
3D IoU(三维交并比) :预测框与真实框体积的交并比,衡量空间重合度
Position RMSE(位置均方根误差) :预测位置与真实位置之间的均方根误差,评估定位精度
Rotation RMSE(旋转角度误差) :预测角度与真实角度的均方根误差,衡量方向估计误差
3D mAP(平均精度) :在不同IoU阈值下3D检测的平均精度,综合反映检测性能
📤 提交流程说明:
使用 CoopDet3D 模型生成的检测结果需以 OpenLABEL 格式(.json 文件) 输出(参考示例)。若自行训练模型,请确保输出符合 OpenLABEL Schema 。对测试集的100帧生成检测文件后,请使用指定脚本将其合并为一个 submission.json 文件。
✅ 在提交至EvalAI排行榜前,请先在本地运行我们的评估脚本进行验证。
📌 最终将 submission.json 文件上传至 EvalAI 排行榜平台。排名靠前的团队将受邀在研讨会上展示方案,并获得荣誉与奖金奖励!
🏅 挑战赛奖项设置:
冠军(第一名)🏆 :金牌 + 奖金500美元 💰
亚军(第二名)🥈 :银牌 + 奖金300美元 💰
季军(第三名)🥉 :铜牌 + 奖金200美元 💰
欢迎全球研究者踊跃参与,共同推动自动驾驶与V2X协同感知技术的发展!
组织者
受邀专家委员会
赞助方
Qualcomm 、Virtual Vehicle Research GmbH、Abaka AI、自动驾驶之心。其中自动驾驶之心是唯一一家国内机构/平台。

更多详情请前往:https://drivex-workshop.github.io/


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









