









知识点:求点M(x,y)逆时针旋转后求坐标值(x1,y1)。

设点M在原坐标系中的坐标为(x,y),对应向量的模为r,幅角为.将坐标轴绕坐标原点,按照逆时针方向旋转角形成新坐标系,点M在新坐标系中的坐标为,则
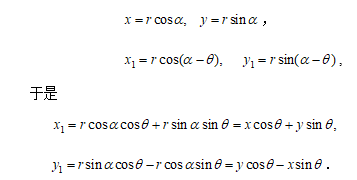
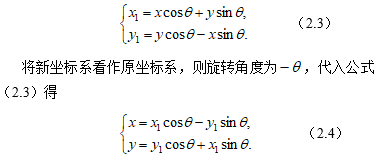
所以,按照逆时针方向旋转后的坐标是:
####题意:
有一条包含n段的单向折线,你想开着一辆会飞的汽车才折线起点到折线终点,且耗油最少。沿着折线方向正常行驶时单位耗油量为1,飞行时单位耗油量为f(2<=f<=5)。
####思路:
先考虑一个简单的,如下图:绿色的为道路,o是起点,b是终点。自然地想到应该有某一个点P(ab上)使得,o飞到P然后沿着道路走到b耗油最少,如果能找到这样的P,那么对于每一个点来说,每条线段都可能有这样的P点,找到他们,求出所有点两两之间的距离,然后用最短路算法就搞定了。

现在的问题是P怎么求?

直到这个几何关系后,我们可以先求出1/f的asin,设为thyta,然后求(o点与ab)垂线旋转thyta和-thyta后与ab的交点,就是P。
要把每个点都放在原点处理,每次都要处理完所有线段。找到的P点不一定就最优。
这个题有点麻烦,终于写完了。
参考:https://blog.csdn.net/zju2016/article/details/78463112
#include <cstdio>
#include <cmath>
#include <vector>
#include <cstring>
#include <algorithm>
#define fi first
#define se second
#define pii pair<int,int>
using namespace std;
const double INF = 1e10;
typedef long long LL;
const double eps = 1e-8;
const int maxn = 2000+5;
int n, F, cnt;
double G[maxn][maxn];
struct Point{
double x,y;
Point(double x = 0, double y = 0):x(x),y(y){}
Point operator - (const Point b){ return Point(x-b.x, y-b.y);}
Point operator + (const Point b){ return Point(x+b.x, y+b.y);}
double operator ^ (const Point b){ return x*b.y - y*b.x;} // 叉乘
Point operator * (double a){ return Point(a*x, a*y);}
double length(){ return sqrt(x*x + y*y);}
};
vector<Point> pts;
// 求x的垂直线段,并单位化
Point VerticalNormalize(Point& a){
double L = a.length();
Point t;
t.x = -a.y / L;
t.y = a.x / L;
return t;
}
// 旋转
Point Rotate(const Point& a, double angle){
Point t;
t.x = a.x*cos(angle) - a.y*sin(angle);
t.y = a.y*cos(angle) + a.x*sin(angle);
return t;
}
double calc_scale(Point a, Point b, Point c, Point v){
Point ab = b - a;
Point bc = c - b;
return (v^ab) / (bc^v);
}
double Mul(const Point& a, const Point& b){ return a.x*b.x + a.y*b.y;} // 点乘
// 判断 x 是否在线段ab上
bool onSegment(Point x, Point a, Point b){
// (x-a)x(x-b)的叉乘为0保证了x,a,b在一条直线上, 点乘 <= 0保证了x位于线段ab上
return (fabs((x-a)^(x-b)) <= eps)&&(fabs(Mul(x-a, x-b)) <= eps||Mul(x-a,x-b) + eps < 0);
}
// 预处理,算出汽车所有可能达到的点和各点之间的距离
void pretreatment(){
double thyta = asin(1.0/F);
// 加点
for(int i = 0; i <= n; ++i){ // 每个点放在原点
for(int j = 0; j < n; ++j){
Point tmp = pts[j+1] - pts[j]; // 处理每个线段
tmp = VerticalNormalize(tmp);
Point up = Rotate(tmp, thyta), down = Rotate(tmp, -thyta);
double scale1 = calc_scale(pts[i], pts[j], pts[j+1], up);
double scale2 = calc_scale(pts[i], pts[j], pts[j+1], down);
//printf("%lf, %lf\n", scale1, scale2);
if(scale1 - eps > 0&&scale1 + eps < 1){
Point r = pts[j] + (pts[j+1] - pts[j])*scale1;
pts.push_back(r);
//printf("cur = %lf,%lf)\n", r.x,r.y);
}
if(scale2 - eps > 0&&scale2 + eps < 1){
Point r = pts[j] + (pts[j+1] - pts[j])*scale2;
pts.push_back(r);
//printf("cur = %lf,%lf)\n", r.x,r.y);
}
}
}
// 算距离
cnt = pts.size();
//printf("cnt = %d\n", cnt);
for(int i = 0; i < cnt; ++i){
for(int j = 0; j < cnt; ++j){
G[i][j] = (pts[j] - pts[i]).length();
// 判断i,j是否在线段上
int k;
for(k = 0; k < n; ++k){
if(onSegment(pts[i], pts[k], pts[k+1])&&onSegment(pts[j], pts[k], pts[k+1])) //break;
// 注意要加这个判断!!!,因为是单向的路,所以逆行只能飞行
if((pts[i] - pts[k]).length() < (pts[j] - pts[k]).length()) break;
}
if(k >= n) G[i][j] *= F;
}
}
for(int i = 0; i < cnt; ++i){
for(int j = 0; j < cnt; ++j) printf("%.3lf ",G[i][j]);
puts("");
}
}
bool vis[maxn];
double dis[maxn];
double dijkstra(){
for(int i = 0; i < cnt; ++i){ dis[i] = INF; vis[i] = 0;}
dis[0] = 0.0;
for(int i = 0; i < cnt; ++i){
double minf = INF;
int k = -1;
for(int j = 0; j < cnt; ++j) if(!vis[j]&&minf > dis[j]) minf = dis[k = j];
if(k == -1) break;
vis[k] = 1;
if(k == n) break;
for(int j = 0; j < cnt; ++j) if(!vis[j]) dis[j] = min(dis[j], dis[k] + G[k][j]);
}
return dis[n];
}
int main()
{
//freopen("in.txt","r",stdin);
int kase = 1;
while(scanf("%d%d",&n,&F) == 2){
if(n+F == 0) break;
pts.clear();
for(int i = 0; i <= n; ++i){
double a,b; scanf("%lf%lf",&a,&b);
pts.push_back(Point(a,b));
}
pretreatment();
double ans = dijkstra();
printf("Case %d: %.3lf\n", kase++, ans);
}
return 0;
}















 553
553











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









