







最近在写代码的时候发现自己对波束成形的理解依旧不是很透彻,就重新找资料学习了一下,整理一下加深印象并在此做个记录。参考资料如下:
https://zhuanlan.zhihu.com/p/10781326364
https://blog.csdn.net/Xujing1143/article/details/120182410
https://www.sharetechnote.com/html/Handbook_LTE_BeamForming.html
PS:如果大致知道波束形成是什么,但是对它的时延计算、复指数 e − j w t e^{-jwt} e−jwt的符号由来、相位补偿、又或者是频域波束形成有点迷的小伙伴可以从实例开始看~
1. 基本概念
波束形成是一种利用多个传感器(如麦克风或天线)的阵列处理技术。它是指将一定几何形状排列的多元基阵的各个阵元输出,经过处理(如加权、时延、求和等)形成空间指向性的方法。
- 目的:提取特定方向来的信号,抑制其他方向上的信号。因此波束形成器可以等效为一个空间滤波器。
- 实际应用:估计目标信号的存在性,并对信号的入射方位进行估计。
- 核心思想:
○ 信号到达不同传感器的时间不同(取决于信号的入射角);
○ 利用这一定向性信息,通过加权和调整延迟来增强某个方向的信号,同时抑制其他方向的信号。 - 分类:一般分为常规波束形成(CBF)和自适应波束形成(ABF)。
2. 常规波束形成
根据实现的途径不同,分为时延波束形成和频移波束形成。
2.1 时延波束形成(Delay-and-Sum Beamforming)
- 概念
- 直接对接收信号进行时延补偿(对准某个方向的波前),然后对所有传感器的数据求和。
- 在某个方向上完全对齐的信号会相干增强,而其他方向的信号由于相移不同,会部分或完全相互抵消。
- 公式

设传感器接收到的信号为
s
i
(
t
)
s_i(t)
si(t),导向向量为
a
(
θ
)
\mathbf{a}(\theta)
a(θ),则波束形成输出为:
y
(
t
)
=
Σ
i
=
1
M
w
i
s
i
(
t
)
y(t)=\Sigma_{i=1}^Mw_i s_i(t)
y(t)=Σi=1Mwisi(t)
其中:
- M M M是传感器个数。
- w i w_i wi是波束形成的权重(在常规波束形成中,通常 w i = 1 w_i=1 wi=1)。
- 若信号的方向为 θ d \theta_d θd,则需要对 s i ( t ) s_i(t) si(t)进行适当的延迟补偿,使得所有信号在该方向上对齐。
- 缺点
- 不能很好地抑制干扰和噪声,如果有多个信号源,干扰较大。
- 角度分辨率较低。
- 实例:以均匀线性阵(ULA)为例

(1)阵列接收信号的表示
假设远场信号为频率为 f 0 f_0 f0 的单频信号: x ( t ) = cos ( 2 π f 0 t ) x(t)=\cos(2\pi f_0 t) x(t)=cos(2πf0t)
相邻阵元间存在时延,对于任意角度 θ \theta θ,相邻阵元的时延差为:
τ = d sin ( θ ) c \tau = \frac{d\sin(\theta)}{c} τ=cdsin(θ)
其中, d d d 为阵元间距, θ \theta θ 为信号来源方向与基阵法线的夹角。以第一个阵元为参考阵元,则每个阵元相对其的时间差可以表示为:
Δ t = [ 0 , τ , 2 τ , ⋯ , ( M − 1 ) τ ] = [ 0 , d sin ( θ ) c , 2 d sin ( θ ) c , ⋯ , ( M − 1 ) d sin ( θ ) c ] \Delta t = \left[ 0, \tau, 2\tau,\cdots,(M-1)\tau] = [0, \frac{d\sin(\theta)}{c}, \frac{2d\sin(\theta)}{c}, \cdots, \frac{(M-1)d\sin(\theta)}{c} \right] Δt=[0,τ,2τ,⋯,(M−1)τ]=[0,cdsin(θ),c2dsin(θ),⋯,c(M−1)dsin(θ)]
相应地,相位差为:
Δ ϕ = [ 0 , 2 π f 0 d sin ( θ ) c , 2 π f 0 2 d sin ( θ ) c , ⋯ , 2 π f 0 ( M − 1 ) d sin ( θ ) c ] \Delta \phi = \left[ 0, 2\pi f_0 \frac{d\sin(\theta)}{c}, 2\pi f_0 \frac{2d\sin(\theta)}{c},\cdots, 2\pi f_0 \frac{(M-1)d\sin(\theta)}{c} \right] Δϕ=[0,2πf0cdsin(θ),2πf0c2dsin(θ),⋯,2πf0c(M−1)dsin(θ)]
由于这个相位差是阵元间空间位置不同所造成的,因此称之为“空间相位差”。
在某一时刻对所有每个阵元同时采样(一个快拍),将会得到
M
M
M 个数据点,将这
M
M
M 个数据点排列起来,可以得到这一时刻阵列的接收信号:
y
(
n
)
=
[
x
(
n
)
,
x
(
n
)
e
−
j
2
π
f
0
d
sin
(
θ
d
)
c
,
x
(
n
)
e
−
j
2
π
f
0
2
d
sin
(
θ
d
)
c
,
⋯
,
x
(
n
)
e
−
j
2
π
f
0
(
M
−
1
)
d
sin
(
θ
d
)
c
]
=
[
1
,
e
−
j
2
π
f
0
d
sin
(
θ
d
)
c
,
e
−
j
2
π
f
0
2
d
sin
(
θ
d
)
c
,
⋯
,
e
−
j
2
π
f
0
(
M
−
1
)
d
sin
(
θ
d
)
c
]
⏟
a
(
θ
d
)
x
(
n
)
=
a
(
θ
d
)
⋅
x
(
n
)
\begin{aligned} \boldsymbol{y}(n) & =\left[x(n), x(n) e^{-j 2 \pi f_{0} \frac{d \sin \left(\theta_{d}\right)}{c}}, x(n) e^{-j 2 \pi f_{0} \frac{2 d \sin \left(\theta_{d}\right)}{c}}, \cdots, x(n) e^{-j 2 \pi f_{0} \frac{(M-1) d \sin \left(\theta_{d}\right)}{c}}\right] \\ & =\underbrace{\left[1, e^{-j 2 \pi f_{0} \frac{d \sin \left(\theta_{d}\right)}{c}}, e^{-j 2 \pi f_{0} \frac{2 d \sin \left(\theta_{d}\right)}{c}}, \cdots, e^{-j 2 \pi f_{0} \frac{(M-1) d \sin \left(\theta_{d}\right)}{c}}\right]}_{\boldsymbol{a}\left(\theta_{d}\right)} x(n) \\ & =\boldsymbol{a}\left(\theta_{d}\right) \cdot x(n) \end{aligned}
y(n)=[x(n),x(n)e−j2πf0cdsin(θd),x(n)e−j2πf0c2dsin(θd),⋯,x(n)e−j2πf0c(M−1)dsin(θd)]=a(θd)
[1,e−j2πf0cdsin(θd),e−j2πf0c2dsin(θd),⋯,e−j2πf0c(M−1)dsin(θd)]x(n)=a(θd)⋅x(n)
可见,每个快拍阵列接收到的信号
y
(
n
)
\boldsymbol{y}(n)
y(n) 是一个向量
a
(
θ
d
)
\boldsymbol{a}(\theta_d)
a(θd) 乘以标量
x
(
n
)
\boldsymbol{x}(n)
x(n),且
y
(
n
)
\boldsymbol{y}(n)
y(n) 是来波方向
θ
d
\theta_d
θd 的函数。
向量 a ( θ d ) \boldsymbol{a}(\theta_d) a(θd) 包含了不同阵元的空间相位差,这便是常说的导向矢量。
Question:阵元接收信号的复指数为什么是负的?比如是 x ( n ) e − j 2 π f 0 d sin ( θ d ) c x(n) e^{\boldsymbol{-j 2 \pi f_{0} \frac{d \sin \left(\theta_{d}\right)}{c}}} x(n)e−j2πf0cdsin(θd) 而不是 x ( n ) e j 2 π f 0 d sin ( θ d ) c x(n) e^{\boldsymbol{j 2 \pi f_{0} \frac{d \sin \left(\theta_{d}\right)}{c}}} x(n)ej2πf0cdsin(θd)?
这和我们作出的来波示意图有关,下图清晰地解释了该表达式是怎么来的。

(来自单一源的波束到不同天线的路径差表示为
e
−
j
d
n
θ
e^{-jdn\theta}
e−jdnθ,此处
sin
θ
≈
θ
i
f
θ
→
0
\sin\theta \approx \theta \space\space\space if \space \theta \rightarrow 0
sinθ≈θ if θ→0)
(2)波束形成
阵列在某一时刻的接收信号为:
y
(
n
)
=
[
1
,
e
−
j
2
π
f
0
d
sin
(
θ
d
)
c
,
e
−
j
2
π
f
0
2
d
sin
(
θ
d
)
c
,
⋯
,
e
−
j
2
π
f
0
(
M
−
1
)
d
sin
(
θ
d
)
c
]
x
(
n
)
=
a
(
θ
d
)
⋅
x
(
n
)
\begin{aligned} \boldsymbol{y}(n) & =\left[1, e^{-j 2 \pi f_{0} \frac{d \sin \left(\theta_{d}\right)}{c}}, e^{-j 2 \pi f_{0} \frac{2 d \sin \left(\theta_{d}\right)}{c}}, \cdots, e^{-j 2 \pi f_{0} \frac{(M-1) d \sin \left(\theta_{d}\right)}{c}}\right] x(n) \\ &=\boldsymbol{a}\left(\theta_{d}\right) \cdot x(n) \end{aligned}
y(n)=[1,e−j2πf0cdsin(θd),e−j2πf0c2dsin(θd),⋯,e−j2πf0c(M−1)dsin(θd)]x(n)=a(θd)⋅x(n)
- 入射角估计
虽然入射角 θ d \theta_d θd 未知,但给定的阵列结构的导向矢量的数学形式是已知的。
我们可以构造一个方向为 α \alpha α 的导向矢量,其中 α \alpha α 是我们猜测的信号的入射角度:
a ( α ) = [ 1 , e − j 2 π f 0 d sin ( α ) c , e − j 2 π f 0 2 d sin ( α ) c , ⋯ , e − j 2 π f 0 ( M − 1 ) d sin ( α ) c ] \boldsymbol{a}(\alpha) = \left[1, e^{-j 2 \pi f_{0} \frac{d \sin \left(\alpha\right)}{c}}, e^{-j 2 \pi f_{0} \frac{2 d \sin \left(\alpha\right)}{c}}, \cdots, e^{-j 2 \pi f_{0} \frac{(M-1) d \sin \left(\alpha\right)}{c}}\right] a(α)=[1,e−j2πf0cdsin(α),e−j2πf0c2dsin(α),⋯,e−j2πf0c(M−1)dsin(α)]
用这个导向矢量与阵列接收信号 y ( n ) \boldsymbol{y}(n) y(n) 做内积:
a ( α ) ⋅ y ( n ) = a ( α ) H ⋅ a ( θ d ) ⋅ x ( n ) = [ 1 + e − j 2 π f 0 d ∣ sin ( α ) − sin ( θ d ) ∣ c + e − j 2 π f 0 d 2 ∣ sin ( α ) − sin ( θ d ) ∣ c + ⋯ + e − j 2 π f 0 d ( M − 1 ) ∣ sin ( α ) − sin ( θ d ) ∣ c ] x ( n ) ≤ M ⋅ x ( n ) \begin{aligned} & \quad \space \boldsymbol{a}(\alpha) \cdot \boldsymbol{y}(n) \\ & = \boldsymbol{a}(\alpha)^H \cdot \boldsymbol{a}\left(\theta_{d}\right) \cdot x(n) \\ &= \left[ 1 + e^{-j 2 \pi f_{0} d \frac{|\sin(\alpha) - \sin(\theta_d)|}{c}} + e^{-j 2 \pi f_{0} d \frac{2|\sin(\alpha) - \sin(\theta_d)|}{c}} + \cdots + e^{-j 2 \pi f_{0} d \frac{(M-1)|\sin(\alpha) - \sin(\theta_d)|}{c}} \right] x(n) \\ & \le M \cdot x(n) \end{aligned} a(α)⋅y(n)=a(α)H⋅a(θd)⋅x(n)=[1+e−j2πf0dc∣sin(α)−sin(θd)∣+e−j2πf0dc2∣sin(α)−sin(θd)∣+⋯+e−j2πf0dc(M−1)∣sin(α)−sin(θd)∣]x(n)≤M⋅x(n)
当 α = θ d \alpha = \theta_d α=θd 时,取等号。
此处手动强调:使用的是 a ( α ) H \boldsymbol{a}(\alpha)^H a(α)H, a ( α ) \boldsymbol{a}(\alpha) a(α) 的共轭转置!!!后文频域波束形成进行的相位补偿就是源于此
该不等式表明,若猜测的方向和信号真实的入射方向一致,此时得到的内积值最大。所以,我们可以通过遍历角度来估计信号的入射方向,最大值对应的角度即为预测的入射方向。可以表述为如下形式:
f
o
r
α
f
r
o
m
−
π
t
o
π
S
(
α
)
=
a
(
α
)
H
⋅
y
(
n
)
θ
d
=
arg max
α
S
(
α
)
\begin{aligned} & for \space \alpha \space from -\pi \space to \space \pi \\ & \quad \quad \space S(\alpha) = \boldsymbol{a}(\alpha)^H \cdot \boldsymbol{y}(n) \\ & \theta_d = \argmax_{\alpha} S(\alpha) \end{aligned}
for α from−π to π S(α)=a(α)H⋅y(n)θd=αargmaxS(α)
- 波束响应
要使目标方向形成最大响应,我们可以对各阵元补偿指定方向 θ d \theta_d θd 的相位,构建最优加权向量:
w = a ( θ d ) = [ 1 , e − j 2 π f 0 d sin ( θ d ) c , e − j 2 π f 0 2 d sin ( θ d ) c , ⋯ , e − j 2 π f 0 ( M − 1 ) d sin ( θ d ) c ] w = \boldsymbol{a}(\theta_d) = \left[1, e^{-j 2 \pi f_{0} \frac{d \sin \left(\theta_d\right)}{c}}, e^{-j 2 \pi f_{0} \frac{2 d \sin \left(\theta_d\right)}{c}}, \cdots, e^{-j 2 \pi f_{0} \frac{(M-1) d \sin \left(\theta_d\right)}{c}}\right] w=a(θd)=[1,e−j2πf0cdsin(θd),e−j2πf0c2dsin(θd),⋯,e−j2πf0c(M−1)dsin(θd)]
则输出信号为:
Y ( n ) = w ⋅ y ( n ) Y(n)=w \cdot \boldsymbol{y}(n) Y(n)=w⋅y(n)
输出的波束响应:
B ( α ) = w = Σ i = 1 M w i ⋅ a ( α ) B(\alpha)=w = \Sigma_{i=1}^M w_i \cdot \boldsymbol{a}(\alpha) B(α)=w=Σi=1Mwi⋅a(α)
B ( α ) B(\alpha) B(α) 即为各方向的响应。
2.2 频域波束形成
频域波束形成类似,主要步骤如下:
(1)对阵列接收信号
y
(
n
)
\boldsymbol{y}(n)
y(n) 进行快速傅里叶变换,将其从时域转换为频域:
X
=
F
F
T
(
y
(
n
)
)
X = FFT(\boldsymbol{y}(n))
X=FFT(y(n))
其中:
- X X X为 M × N M \times N M×N的二维向量;
- M M M是阵元个数;
- N N N是频域点数。
(2)对各阵元信号进行指定方向
α
\alpha
α 的相位补偿:
f
o
r
f
i
n
f
r
e
q
s
:
f
o
r
k
f
r
o
m
0
t
o
(
M
−
1
)
:
p
h
a
s
e
_
s
h
i
f
t
[
k
,
f
]
=
e
−
j
2
π
f
k
d
sin
(
α
)
c
\begin{aligned} & for \space \space f \space \space in \space \space freqs:\\ & \quad \quad for \space\space k \space\space from \space\space 0 \space\space to \space\space (M-1):\\ & \quad\quad\quad \quad phase\_shift \left[ k, f \right] = e^{-j 2 \pi f \frac{kd \sin \left(\alpha\right)}{c}} \end{aligned}
for f in freqs:for k from 0 to (M−1):phase_shift[k,f]=e−j2πfckdsin(α)
补偿后的信号:
p
h
a
s
e
_
s
h
i
f
t
=
p
h
a
s
e
_
s
h
i
f
t
.
c
o
n
j
(
)
X
′
=
p
h
a
s
e
_
s
h
i
f
t
⋅
X
\begin{aligned} phase\_shift &= phase\_shift.\bold{conj()} \\ X' &=phase\_shift\cdot X \end{aligned}
phase_shiftX′=phase_shift.conj()=phase_shift⋅X
(3)对各个阵元信号的某一个频率进行求和,再对各阵元信号的所有频率对应的信号值进行求和,可以得到该角度的响应幅度。
(4)对给定角度范围进行遍历,可以得到不同角度下的响应。
-
螺旋阵单声源的运行效果如下:
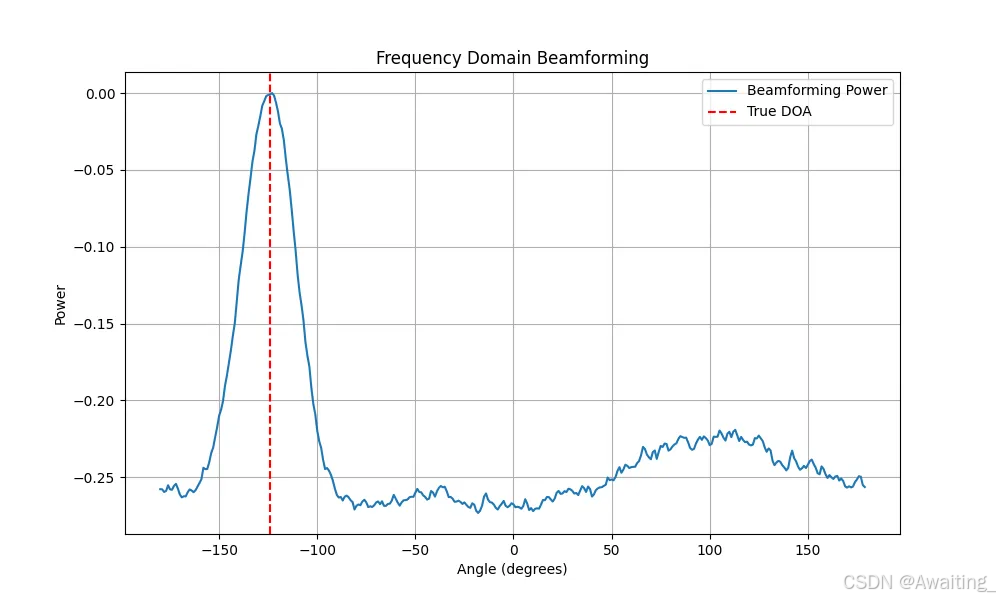
PS:!!!!频域补偿的符号一定要注意啊啊啊啊。调试n天的血泪教训 … 做出来的结果终于对了! -
实现代码如下:
def get_steer_vector(positions, theta_rad, freq, c=340):
u = np.array([np.cos(theta_rad), np.sin(theta_rad)])
tau = positions.T @ u / c # 正确时延计算
return np.exp(-1j * 2 * np.pi * freq * tau)
def freq_beamforming(waveform, fs, theta_range, array_geometry, c=340, phi=0):
num_sensors = waveform.shape[0]
# 对信号进行FFT 计算频谱
n_fft = waveform.shape[1]
fft_values = np.fft.fft(waveform, n_fft, axis=1) # (num_sensors, freqs)
fft_freqs = np.fft.fftfreq(n_fft, 1 / fs)
# 只取前半部分频率
half_n = len(fft_freqs) // 2
power = []
for theta in theta_range:
svs = []
for i in range(half_n):
f = fft_freqs[i]
sv = get_steer_vector(array_geometry, theta, f, c) # 计算相位补偿
svs.append(sv)
svs = np.array(svs).reshape(-1, num_sensors)
phase_shift = svs.conj().T # 注意相位补偿的符号
sum_signal = np.sum(fft_values[:, :half_n] * phase_shift, axis=0)
power.append(np.sum(np.abs(sum_signal) ** 2))
# 归一化
power /= np.max(power)
plt.figure(figsize=(8, 5))
plt.plot(np.rad2deg(theta_range), power)
plt.xlabel("Angle (degrees)")
plt.ylabel("Normalized Energy")
plt.legend()
plt.title("Frequency Domain Beamforming")
plt.show()
return power
wav_path = './record/2kHz_sine_25degree.wav' # 根据自己的待测音频路径进行修改
waveform1, fs = torchaudio.load(wav_path)
# 读取阵元位置文件
arrangement_path = './DoA/coordinate.csv'
df = pd.read_csv(arrangement_path)
arrangement = df[['X', 'Y']].to_numpy().T # 单位为 m
# arrangement 根据自己数据采集阵列的位置参数进行修改,也可以构建 ULA 来模拟
theta_scan = np.linspace(- np.pi, np.pi, 360, endpoint=False)
power = freq_beamforming(signal, fs, theta_scan, arrangement)

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









