






上次,我们在《两轮电动车BSD盲区检测雷达日间和夜间实测和雷达天线罩设计》(https://blog.csdn.net/Dayang88888/article/details/143874199?spm=1001.2014.3001.5501)一文中对WKV58RR进行了实际上路测试,应广大网友和某雷达厂要求,现对WK7760IC雷达也做了测试。
盲区监测/并线辅助系统包括盲区监测(BSD)和并线辅助(LCA)功能,是对车辆后视镜的补充(但未消除后视镜的必要性)。通过安装于车辆后部的77GHz 车载毫米波雷达传感器搜集本车后方和侧后方道路运动目标的运动情况,提醒驾驶员避免因变道而可能引发的碰撞风险。本系统为辅助驾驶系统,无任何自动驾驶行为,仅适用于警告用户可能发生的碰撞从而减少事故发生率;在系统没有发出警告的情况下不能完全保证驾驶员可以安全地完成车道变化动作,需要驾驶员注意行驶安全并遵守交通安全法规。
【测试工况】
测试时长:3小时
道路:江苏无锡某县级公路(非机车动车道)
雷达提供商:上海渭成智能科技有限公司
被测车辆:国产三轮电动车(已正式上牌)
系统用电:12VDC
电源:接车辆12VDC电源一台。
测试要求:输出左侧、右侧、和正后面来车信息,输出到驾驶室左右后视镜
雷达安装如下:
实测视频如下:
两轮和三轮电动车BSD最新路测
产品安装需严格遵循本安装规范描述BSD雷达在电动车上的整合与安装,以确保有限的偏差与调整其对雷达影响效力最小,保障毫米波雷达使用的最佳性能。
雷达两路发射天线和两路接收天线,接收信号通过前端芯片混频之后进行 ADC 采样,而后数字信号进入高速数字处理芯片进行数字信号处理、目标检测、跟踪、分类识别等,最后根据报警策略的过滤结果输出是否报警的信号。雷达工作时需要获取车辆的速度信息,该信息通过车体总线传输至雷达。
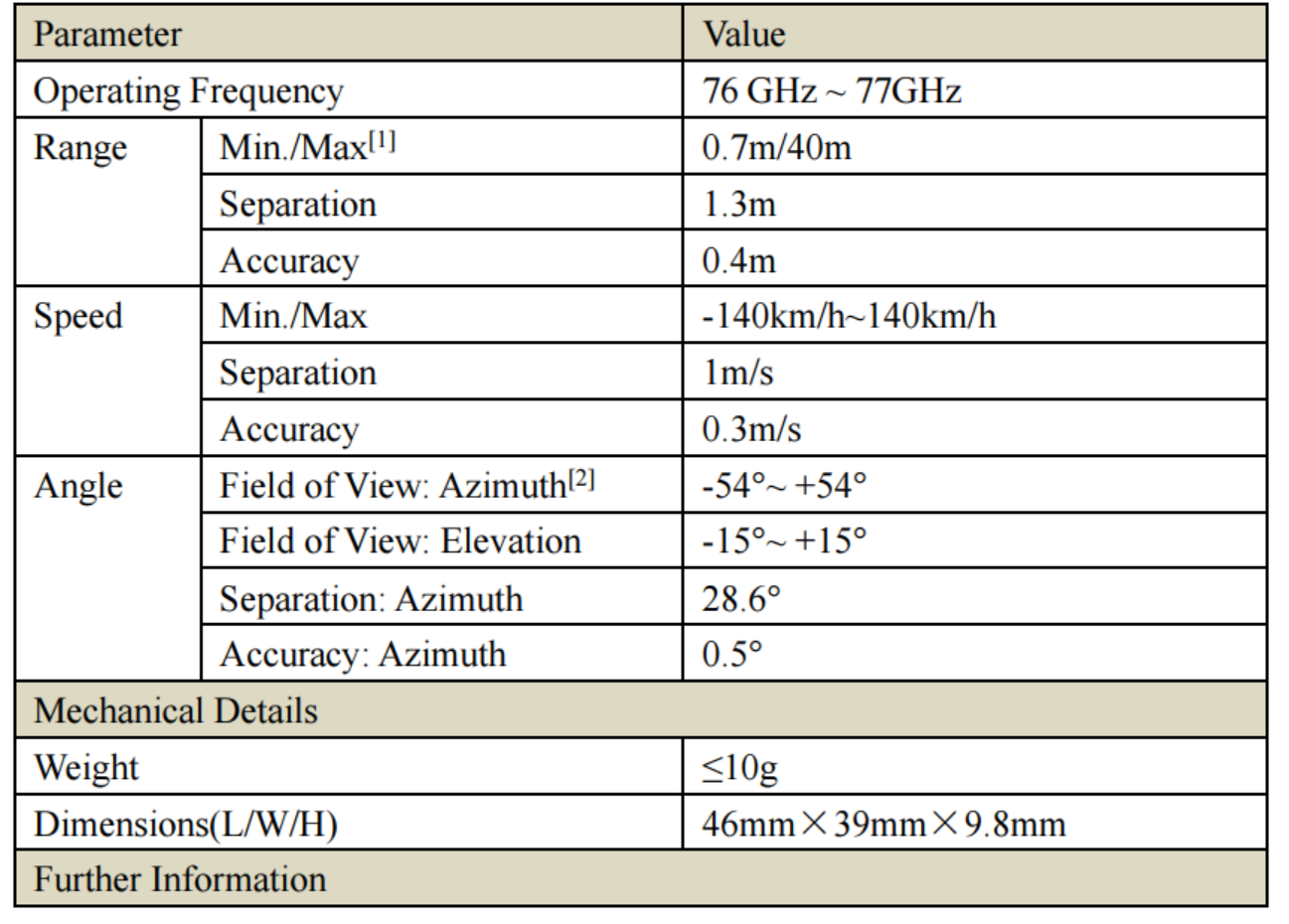
经过现场反复测试,系统可通过 CAN 接口接入车体的 CAN 总线网络,符合 ISO11898,波特率适应主机 CAN 协议。暂不支持 CAN 网络诊断,系统在开机时和运行中进行自检,并将故障信息输出。系统暂不支持 OSEK、Autosar 等网络惯例方式。
符合国际标准 SIF 通信协议,传输波特率自适应范围宽,数据的电平遵守TTL 规范。
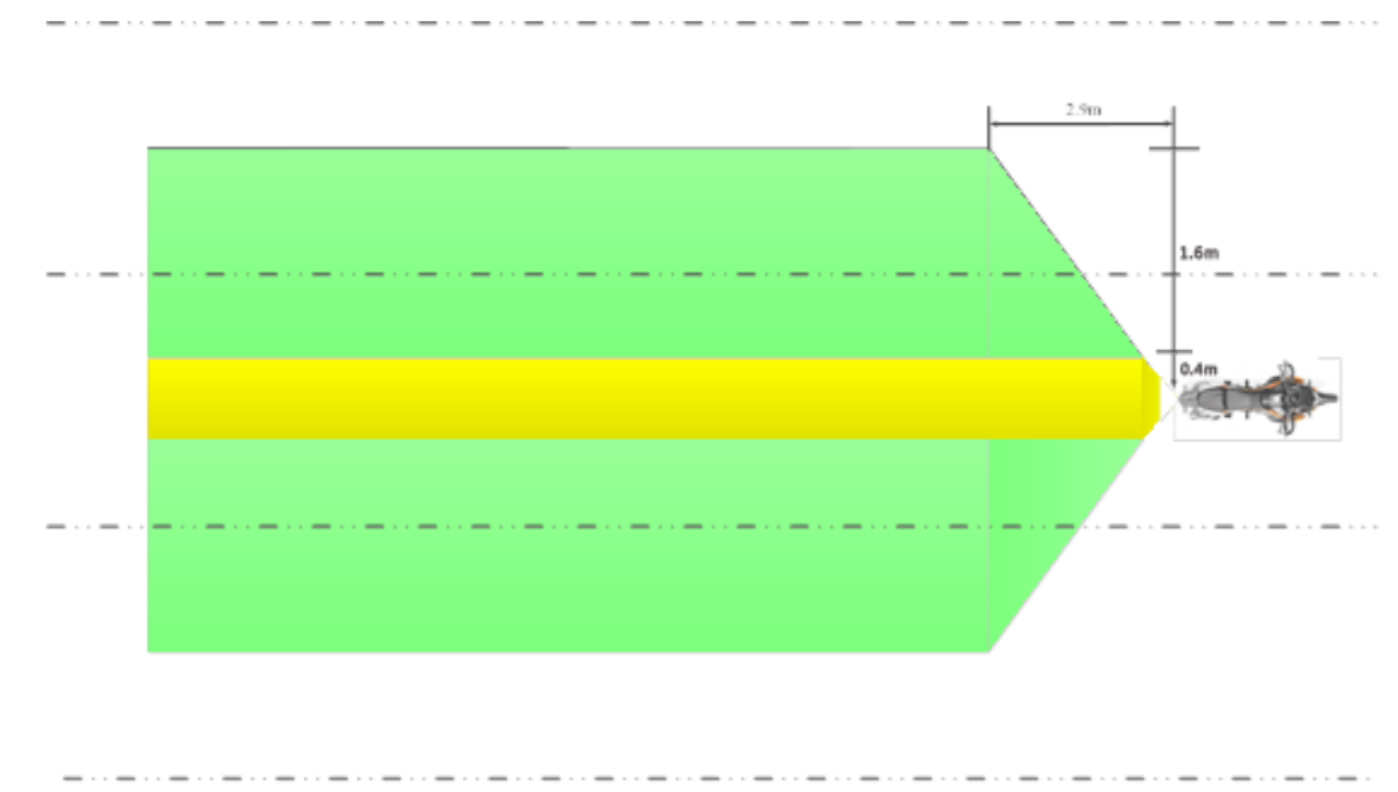
盲区监测/并线辅助是指系统探测本车正后方和侧后方区域内的目标车辆,当本车驾驶员有变道意图时,系统会评估本车所在场景,并对驾驶员作出是否可以变道的预警提示。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









