






基于二阶滑模(FST- SMC)控制速度环的永磁同步电机超螺旋滑模观测器(STA- SMO)模型全新
支持
速度环引入二阶滑模控制算法,较于传统滑模速度控制器与传统pi速度控制器,抗负载扰动强,宽速范围內转速波形几乎没有超调!
观测器引入超螺旋滑模控制率,相较于传统滑模观测器,估计转速与转子位置精度提高,有效削弱抖振!
赠送传统滑模速度控制模型与传统smo组合模型
赠送参考资料及观测器搭建说明文档!
ID:31200746675264063
盲生与华点
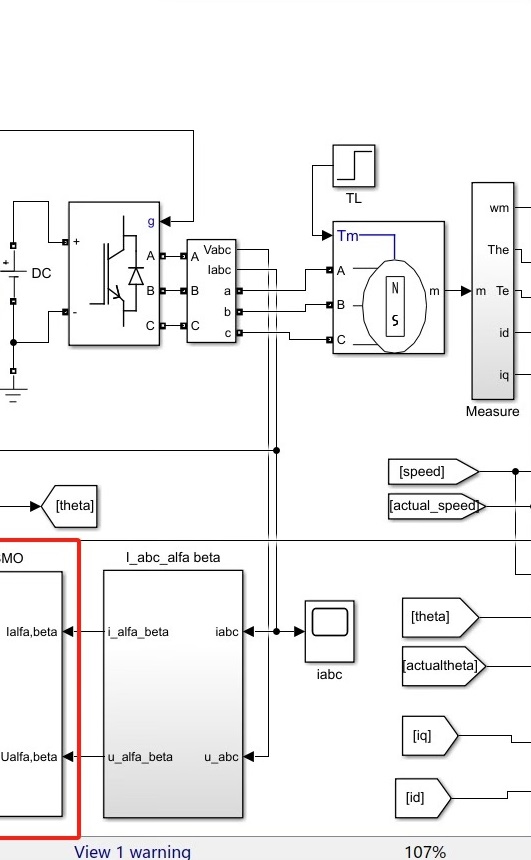
基于二阶滑模(FST- SMC)控制速度环的永磁同步电机超螺旋滑模观测器(STA- SMO)模型全新,为电机控制领域带来了一种全新的控制算法。本文将着重介绍基于二阶滑模控制算法的速度环以及引入超螺旋滑模控制率的观测器对永磁同步电机的优化控制方法。
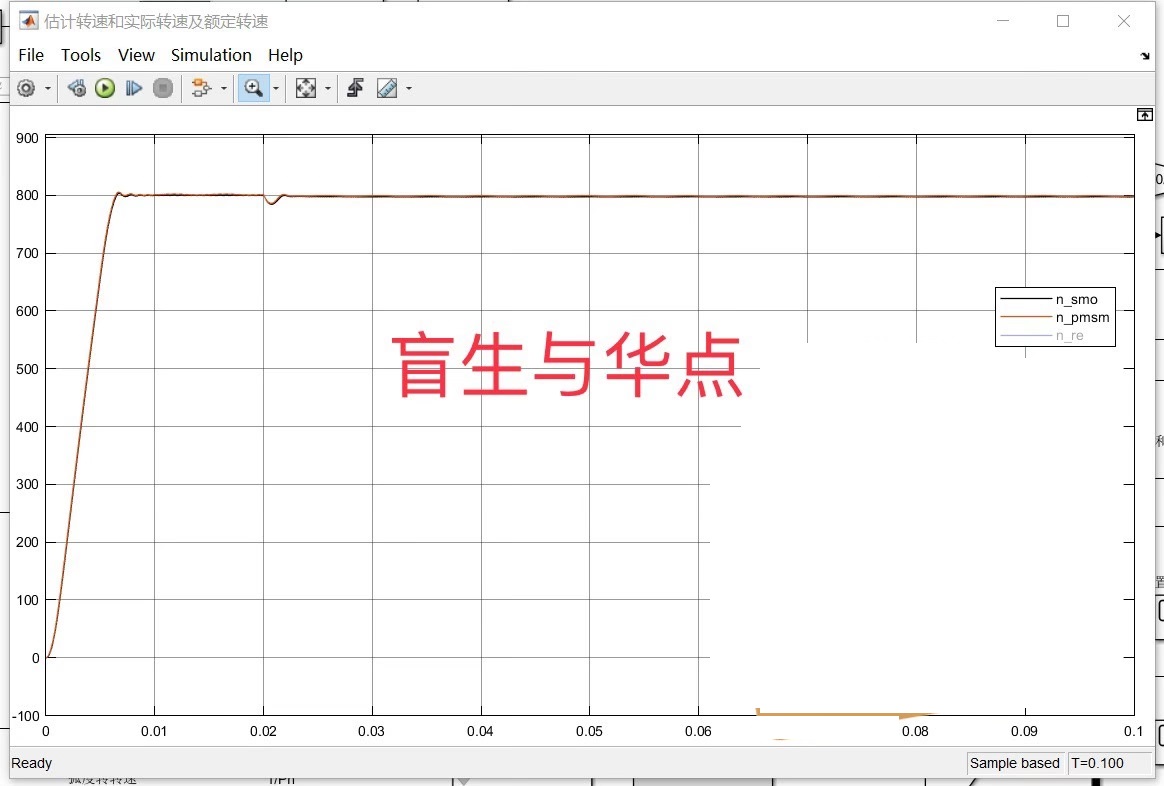
首先,我们介绍基于二阶滑模控制算法的速度环。相比传统的滑模速度控制器和传统的PI速度控制器,基于二阶滑模控制算法的速度环具有更强的抗负载扰动能力。在宽速范围内,转速波形几乎没有超调现象。传统的控制器在面对负载扰动时常常出现波动和超调的情况,而二阶滑模控制算法通过引入滑模曲线的二阶导数来抑制这些不稳定因素,从而使得速度环控制更加稳定。
其次,我们介绍引入超螺旋滑模控制率的观测器对永磁同步电机控制的优化效果。传统的滑模观测器在估计转速和转子位置时存在一定的精度问题,并且容易产生抖振现象。而引入超螺旋滑模控制率的观测器通过改进传统的滑模观测器结构和算法,提高了对转速和转子位置的估计精度,并有效削弱了抖振干扰。这使得永磁同步电机在高精度控制的场景下表现更加稳定和准确。
在本文中,我们还赠送了传统滑模速度控制模型和传统SMO组合模型,为读者提供了更多的控制算法选择和研究参考。除此之外,我们还提供了相关的参考资料和观测器搭建说明文档,帮助读者更好地理解和实践这一控制方法。
总结起来,基于二阶滑模控制速度环和超螺旋滑模观测器的永磁同步电机控制方法在抗负载扰动性能和估计精度上相较于传统方法具有显著优势。这一方法的引入为永磁同步电机的控制提供了新的思路和解决方案。未来的研究方向可以在进一步优化控制算法的基础上,拓展应用场景,进一步提高永磁同步电机的性能和效率。
【相关代码,程序地址】:http://fansik.cn/746675264063.html
















 848
848











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









