






四旋翼飞行器(UAV)跟随圆形轨迹模型预测控制(MPC)控制器设计 MPC控制器设计,用于无人机在保持0航向的情况下,以0.1 rad/sec的角速度在5米高度跟踪圆形轨迹。
ID:8619730612560190
硕博科技工作室

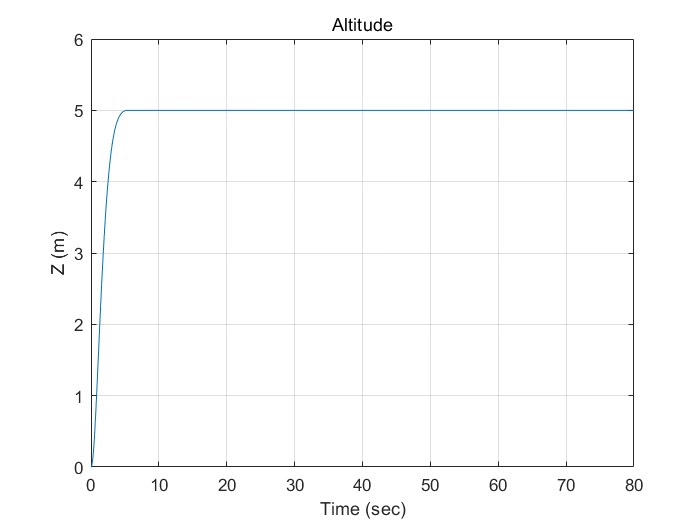
四旋翼飞行器(UAV)是一种无人机,由四个电动机驱动可自由旋转的桨叶组成。它在近年来得到了广泛的应用,例如航拍、灾害监测、快递配送等领域。为了实现精确的飞行控制和路径跟踪,很多研究人员致力于设计高性能的控制器。本文将介绍一种基于模型预测控制(MPC)的控制器设计方法,用于使无人机在保持0航向的情况下,以0.1 rad/s的角速度在5米高度上跟踪圆形轨迹。
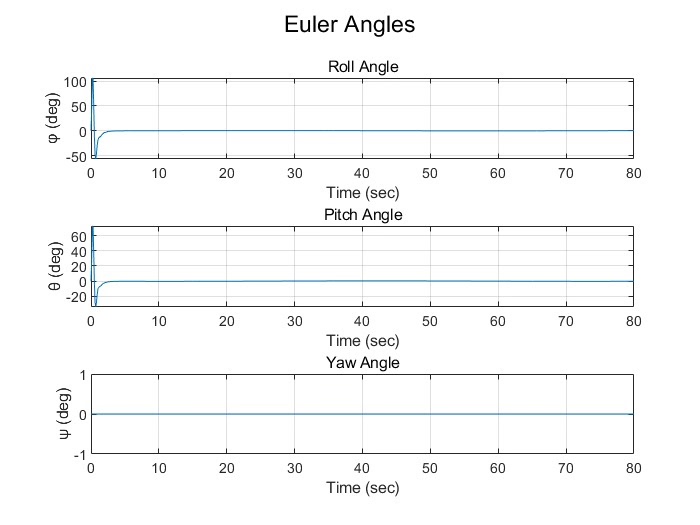
MPC控制器是一种基于系统动态模型的控制方法,它通过预测系统未来的状态来优化控制输入,从而实现最优的控制效果。在设计MPC控制器之前,我们首先需要建立四旋翼飞行器的动态模型。四旋翼飞行器的动态模型可以通过欧拉角表示,其中包括俯仰角、滚转角和偏航角。此外,还需要考虑到飞行器的位置和速度信息。
为了实现在保持0航向的条件下以0.1 rad/s的角速度跟踪圆形轨迹,我们可以将这个问题分解成两个子问题:保持0航向和跟踪圆形轨迹。首先,我们可以设计一个航向控制器,使得飞行器一直朝向目标方向,即0航向。这可以通过PID控制器来实现,PID控制器根据当前航向偏差来调整飞行器的转向角度。
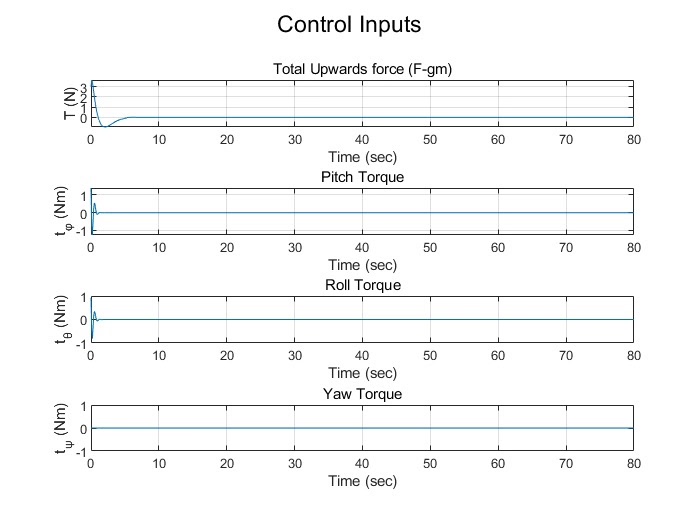
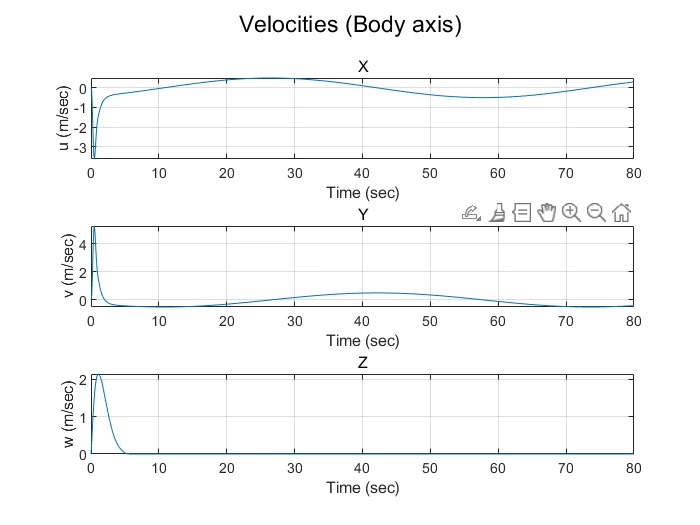
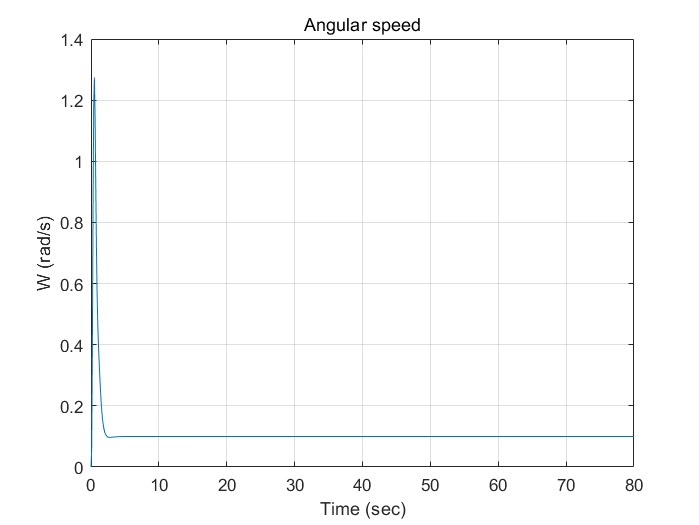
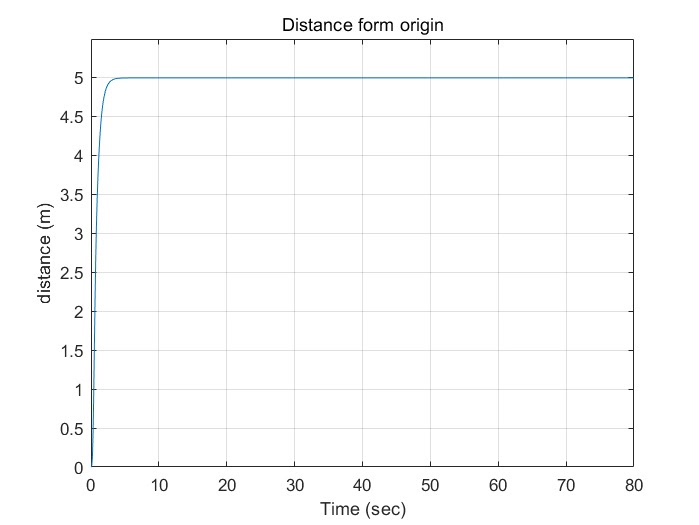
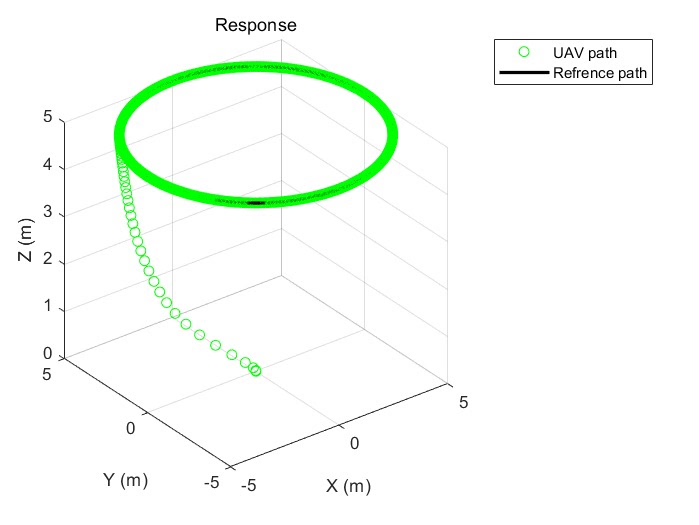
接下来,我们需要设计一个位置和速度控制器,使得飞行器能够以0.1 rad/s的角速度跟踪圆形轨迹。为了实现这个目标,我们可以使用MPC控制器。首先,我们可以利用圆形轨迹模型来预测飞行器未来的位置和速度。然后,我们可以根据预测结果来计算出最优的控制输入,使飞行器朝着目标轨迹快速靠近。
在实际应用中,MPC控制器的设计需要考虑到多个因素,例如传感器噪声、控制延迟和飞行器动力学特性。此外,还需要通过实验数据对控制器进行参数调整和验证。通过不断优化控制器设计,我们可以提高四旋翼飞行器的飞行性能和路径跟踪精度。
总结起来,本文介绍了基于MPC控制器的四旋翼飞行器跟随圆形轨迹模型预测控制的控制器设计。通过保持0航向和以0.1 rad/s的角速度在5米高度上跟踪圆形轨迹,我们可以实现高精度的飞行控制和路径跟踪。随着无人机技术的不断发展,MPC控制器有望在实际应用中发挥重要作用,并为无人机的飞行控制和路径规划提供新的解决方案。
【相关代码,程序地址】:http://fansik.cn/730612560190.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









