






 本文介绍了使用Matlab实现的2维A*路径规划算法,支持用户交互选择起点、障碍物和目标,可导出为C++DLL并集成到VS。还扩展至3维,处理任意格式三维模型的避障,优化计算效率。
本文介绍了使用Matlab实现的2维A*路径规划算法,支持用户交互选择起点、障碍物和目标,可导出为C++DLL并集成到VS。还扩展至3维,处理任意格式三维模型的避障,优化计算效率。
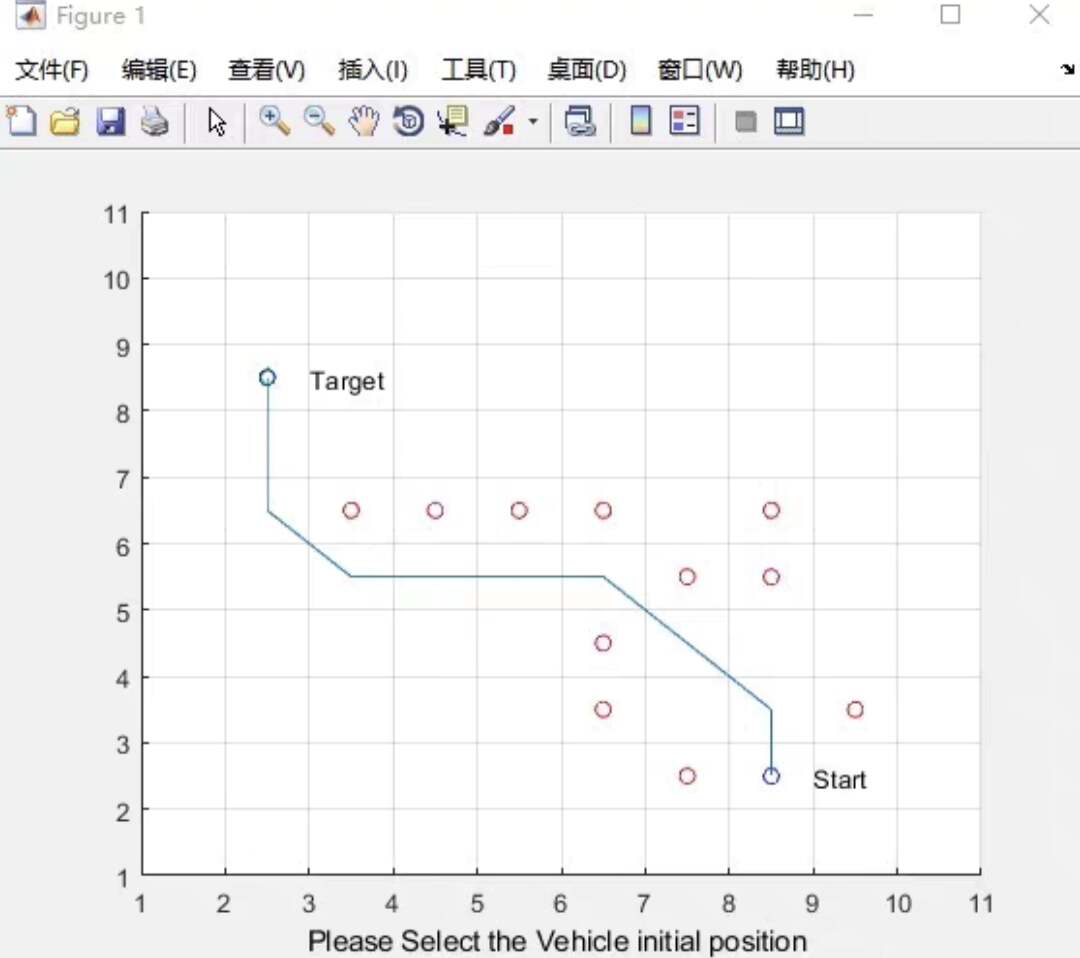
matlab算法,2维A*路径规划算法,在地图范围内(大小随意修改) ,可以通过鼠标点击来选择起始点,障碍物以及目标点的位置。
另外,支持导出dll库,matlab转c++,vs中可调用。
有3维A*算法需求的也可以联系,障碍物可以为任意格式三维模型,运动物体可以是三维模型,可以实现模型避障以及优化3维A*算法的计算时间。
ID:413766199511866
用户_99290544
标题:Matlab算法应用于2维A*路径规划算法的地图导航及其扩展性分析
摘要:本文介绍了一种基于Matlab算法的2维A路径规划算法,并在地图范围内实现了通过鼠标点击选择起始点、障碍物和目标点位置的功能。同时,本文展示了该算法支持导出dll库、Matlab转C++以及在VS中调用的特性。此外,本文还提供了应用于3维A算法的方案,并说明障碍物可以为任意格式的三维模型,运动物体也可以是三维模型,以实现模型避障和优化3维A*算法的计算时间。
-
引言
在现代社会中,由于各类机器人和无人机的广泛应用,路径规划算法已成为一个研究热点。其中,A算法因其高效性和广泛适用性而备受关注。本文介绍了一种基于Matlab算法的2维A路径规划算法,并对其地图导航能力进行了详细阐述。 -
2维A*路径规划算法的实现
2.1 地图范围定义和参数设置
在本算法中,地图范围可以根据需求随意修改。通过鼠标点击操作,用户可以选择起始点、障碍物和目标点的位置,为路径规划提供准确的输入。此外,算法参数的设置也对路径规划的效果产生了重要影响,例如启发式函数的选择、开放列表的管理等。
2.2 A算法流程分析
A算法的核心思想是综合考虑启发式函数和实际代价函数,通过动态搜索选取最佳路径。本文详细介绍了A*算法的各个环节,包括开放列表的维护、启发式函数的更新和路径的选取等。同时,通过实例分析和实验结果验证了该算法的高效性和准确性。
- Matlab算法的拓展性应用
3.1 DLL库的导出和调用
为了提高算法的实用性,本文提供了将Matlab算法转换为C++的方法,并导出为DLL库。这样,用户可以在VS等开发环境中直接调用该DLL库,实现算法的快速应用和集成。
3.2 3维A算法的拓展
对于有3维A算法需求的用户,本文也给出了相应的解决方案。此外,为了更好地适应复杂环境中的路径规划需求,本文提供了障碍物可以为任意格式三维模型、运动物体可以是三维模型的功能。通过模型避障和优化3维A*算法的计算时间,进一步提高了算法的适用性和可扩展性。
-
实验结果与分析
本文列举了一系列实验结果,对比了不同参数设置下的路径规划效果,并通过图表进行了直观展示。实验结果表明,本文提出的Matlab算法在路径规划方面具有较高的准确性和效率,能够满足实际应用的需求。 -
结论
本文以Matlab算法为基础,实现了一种高效的2维A路径规划算法,并对其地图导航能力进行了详细介绍。通过支持导出DLL库、Matlab转C++和在VS中调用,算法的实用性得到了进一步提升。同时,本文提出了应用于3维A算法的解决方案,并探讨了模
以上相关代码,程序地址:http://wekup.cn/766199511866.html
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









