






四轮独立驱动电动汽车转矩分配控制
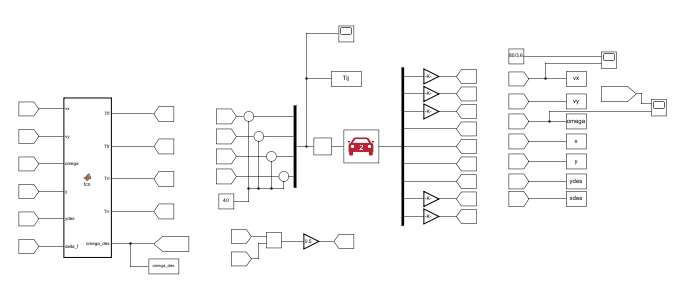
CarSim与Simulink联合
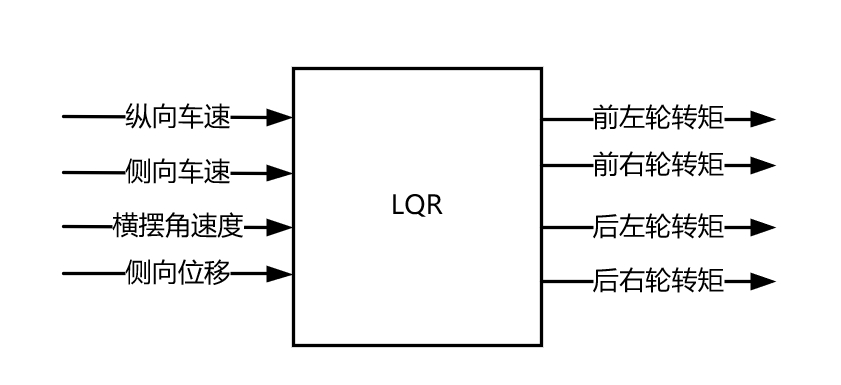
三自由度车辆模型(纵向、横向、横摆)
控制方法为离散LQR(包括连续系统的离散方法和求解方法)
带有完整详细的控制器、二自由度稳定性控制目标推导文档,不带
MATLAB版本为2018b CarSim版本为2018
ID:9629671549450263
让一部分人先把模型搞起来
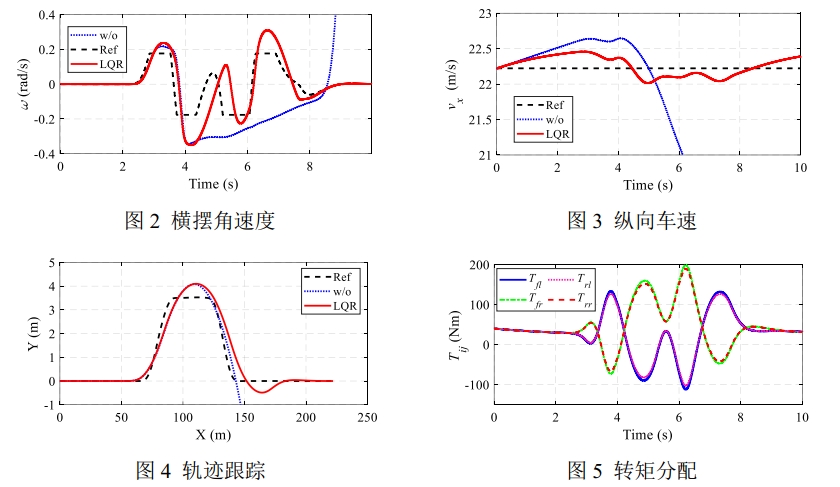
四轮独立驱动电动汽车转矩分配控制是一种先进的汽车控制技术,旨在通过控制每个车轮的驱动力大小,来实现汽车在不同路况下的优化性能。本文将介绍CarSim与Simulink联合使用的三自由度车辆模型及其控制方法,重点讨论离散LQR控制方法。
首先,我们需要了解三自由度车辆模型。该模型包括纵向、横向和横摆三个方向的运动自由度,可以较为准确地描述汽车在不同方向上的运动行为。纵向自由度包括汽车的加速度和制动力;横向自由度描述汽车的转向行为;而横摆自由度则代表汽车在曲线行驶时的姿态稳定性。通过使用这个三自由度车辆模型,我们可以更好地控制汽车的运动行为。
在控制方法方面,本文采用了离散LQR方法。LQR是线性二次型调节器的简称,是一种广泛应用于控制系统的优化控制算法。离散LQR是将连续系统的LQR方法离散化处理后得到的控制方法。离散LQR方法包括求解连续系统的离散化方法和求解方法。
在离散化方法方面,我们使用了MATLAB的2018b版本。MATLAB是一款强大的数学计算软件,广泛用于各种科学和工程计算任务。通过MATLAB,我们可以对连续系统进行离散化处理,将其转化为适用于离散LQR方法的形式。
CarSim是一款专业的车辆动力学仿真软件,用于模拟汽车在不同路况下的运动行为。而Simulink是MATLAB的一个重要模块,用于搭建和模拟动态系统的图形化建模环境。在本文中,我们将CarSim与Simulink进行联合使用,以实现对三自由度车辆模型的控制。
本文还提供了完整详细的控制器和二自由度稳定性控制目标推导文档。在这些文档中,读者可以了解控制器的设计原理和稳定性分析方法,并在实际应用中进行参考。
总而言之,本文围绕四轮独立驱动电动汽车转矩分配控制展开了深入的技术分析。通过使用CarSim与Simulink联合的三自由度车辆模型及离散LQR控制方法,我们可以实现对汽车在不同路况下的优化性能。读者可以通过MATLAB的2018b版本,了解离散LQR方法的求解过程,并参考我们提供的控制器和稳定性控制目标推导文档进行实际应用。这些方法和文档将有助于开发更先进的电动汽车控制系统,提升汽车的性能和稳定性。
相关的代码,程序地址如下:http://wekup.cn/671549450263.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









