






搜索策略:盲目搜索
影响搜索策略的要素
我们在前文有提到,搜索就是不断地从frontier集合中移除结点,再将子节点加入到frontier的过程
在这个过程中,最重要的就是从frontier中选择哪个结点进行扩展,这就决定了不同的搜索策略
盲目搜索策略
我们在前面提及的搜索都没有考虑当前结点离目标结点的距离
我们称这种搜索为盲目搜索
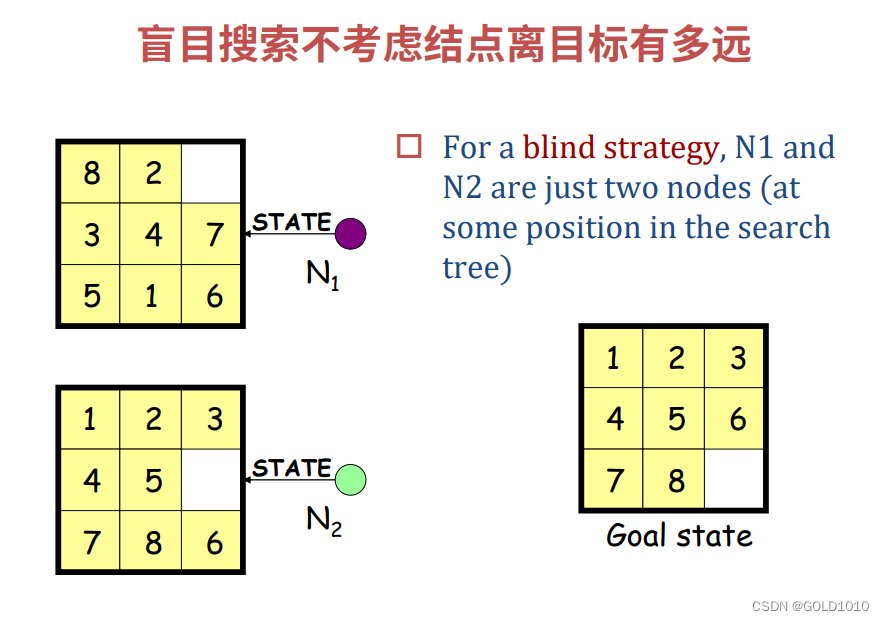
对于上图而言,上述两个状态都只是搜索过程中的一个结点而已,在盲目搜索中,它们并没有谁优谁劣的比较。
下面我们将介绍几种经典的盲目搜索策略
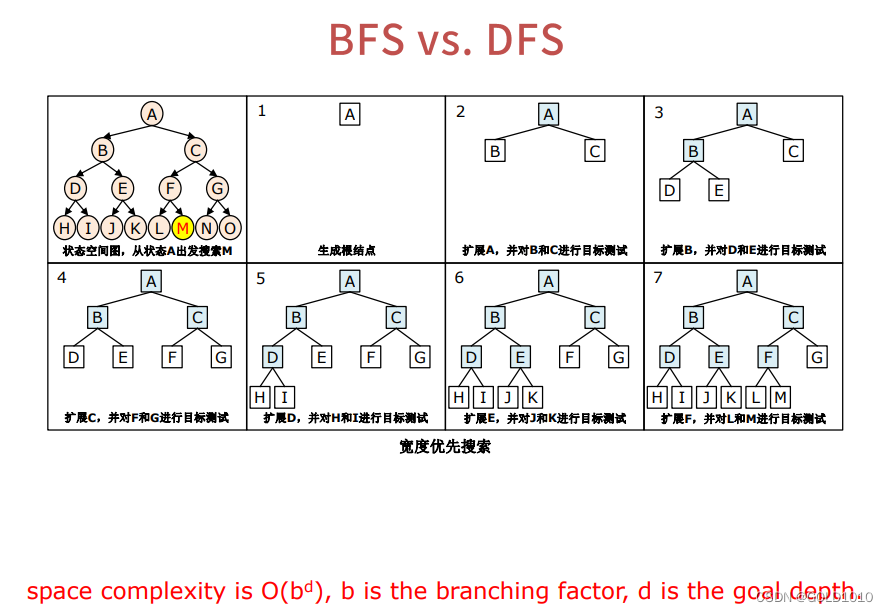
宽度优先搜索BFS
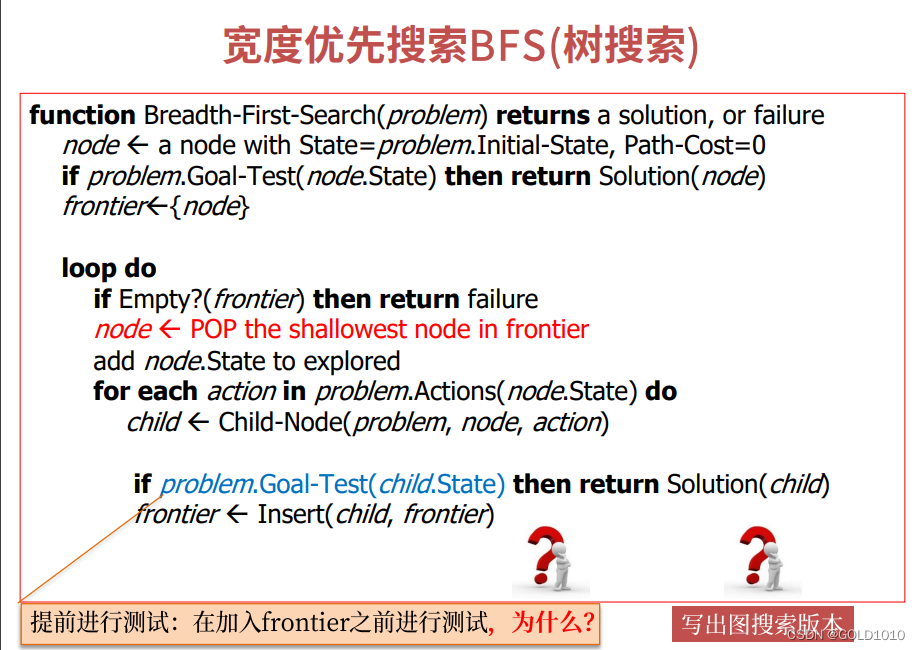
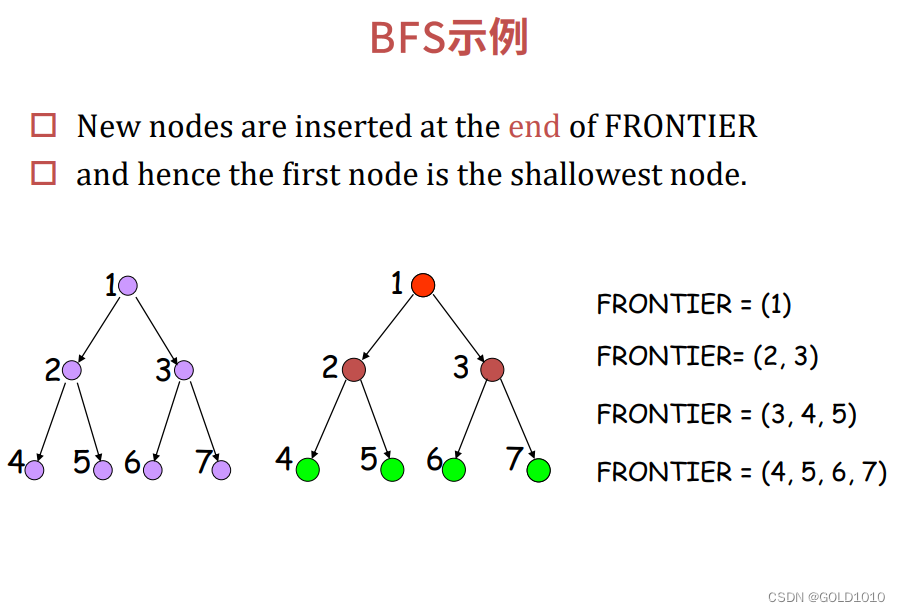
宽度优先搜索的特点是:每次都从frontier中选取深度最浅的结点进行扩展
并且在将子节点加入frontier前进行目标测试,这是为了能尽量少的扩展下一层
若要将上述改为图搜索版本,只需要在目标测试之前加入重复性判断即可
IF child is not in frontier or explored then:目标测试
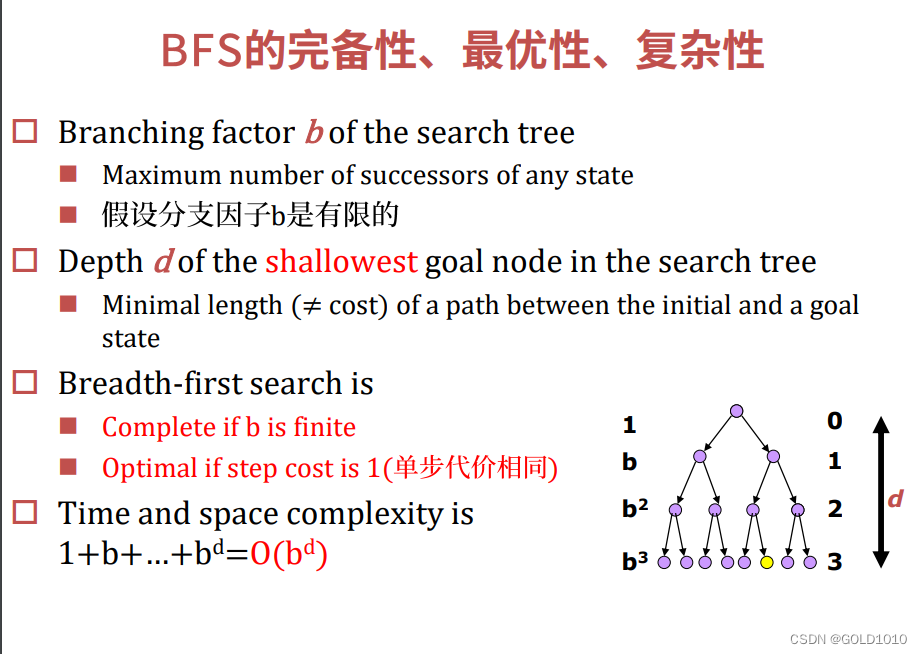
宽度优先搜索优先获得的是深度最浅的解,并不是路径代价最短的解
因此如果我们想要路径代价最短的解,就要优先扩展路径代价最小的解
也就是下面将提到的一致代价搜索UCS
一致代价搜索UCS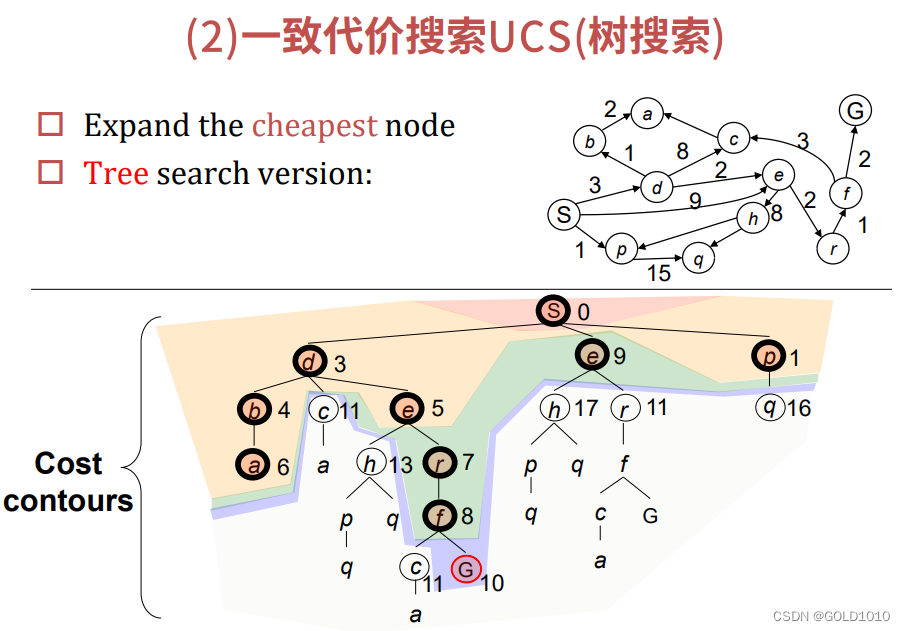
我们从初始状态S出发,可得下列访问次序
S,p,d,b,e,a,r,f,e,G
这里有两个需要注意的地方
①我们在访问到结点f时,会将f结点的子节点也加入到frontier中,此时就已经能发现目标结点G已经被找到。但如果此时就结束搜索的话,就不能确保找到路径代价最优了,因此我们还需将该目标节点放回到frontier中,再将其从frontier中拿出来进行测试。
②若搜索出的结点与已经存在的结点重复了,此时我们需要选出路径代价最小的。如上图中的两个e,一个代价为5,另一个代价为9.因此我们会去除掉代价为9的结点e,保留代价为5的结点e。若两个结点代价相同,则我们去掉最新的结点,而保留老的结点,如下图所示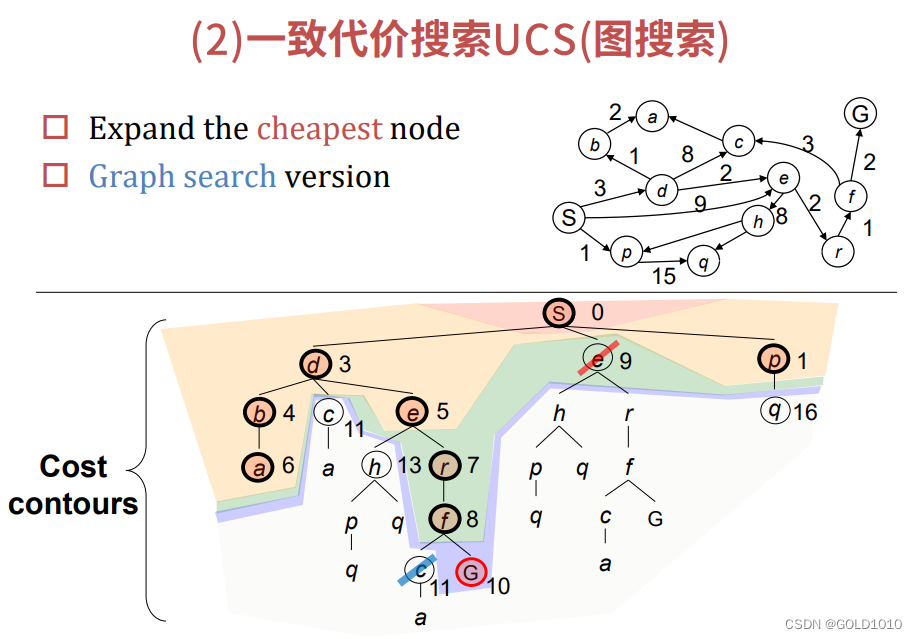
该算法的特点在于以下两点
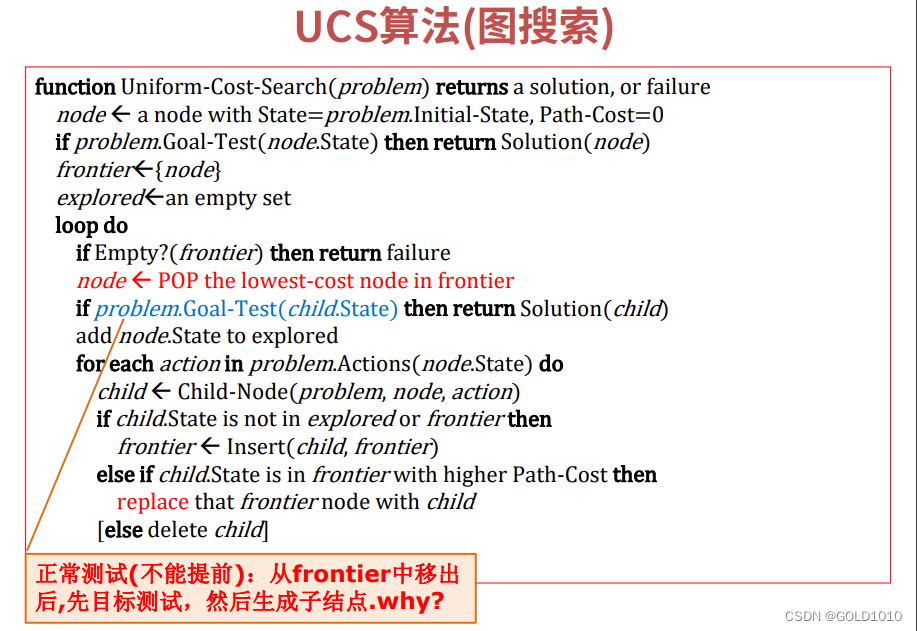
①每次都从frontier选出路径代价最小的结点进行扩展
②每次都在将子节点加入explored集合之前进行目标测试,这样是为了保证路径最优性
③重复处理:即若新节点的状态和explored里的节点状态一样时,那么新扩展出的节点的路径代价一定会大于已经explored的节点的路径代价,故可以直接去除新节点
BFS和UCS的联系
若单步代价相同,则UCS的结点扩展顺序和BFS相同,只是UCS比BFS多扩展一层结点。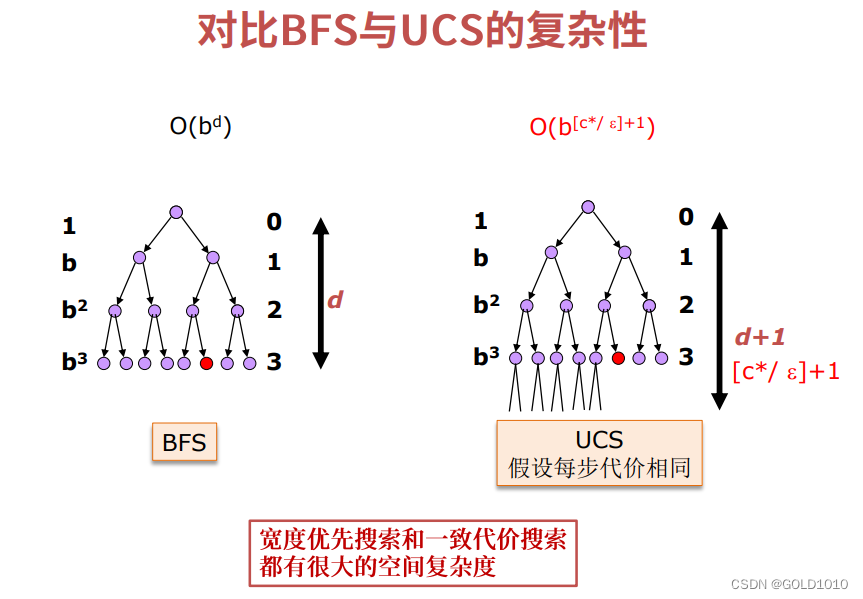
它们两者的空间复杂度都非常高。
因此我们需要考虑一个可以降低空间复杂度的方法,即深度优先搜索DFS
深度优先搜索DFS
先来对比一下BFS和DFS两个算法的异同
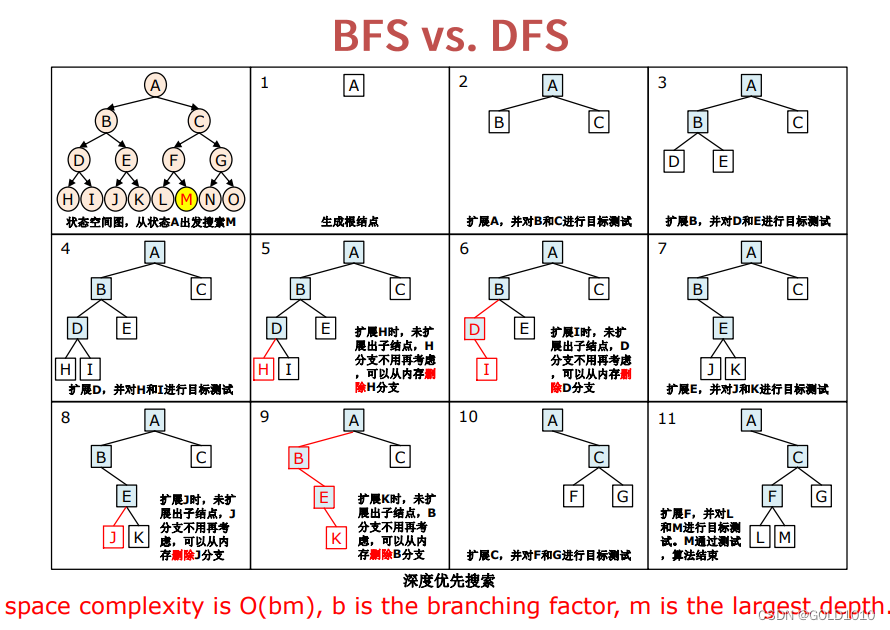
关于深度优先搜索的目标测试问题,该方法与宽度优先一样可进行提前测试
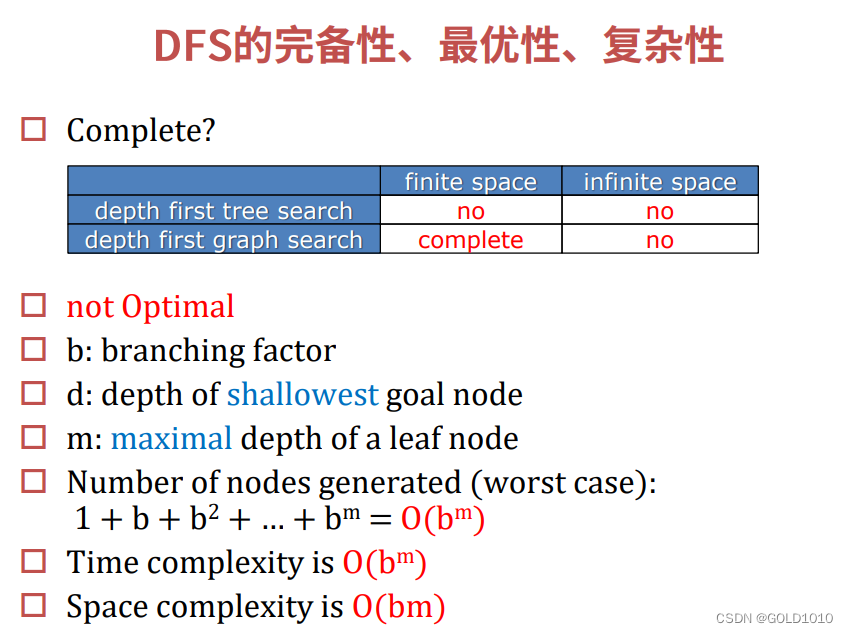
深度优先树搜索是不完备的。因为即使在有限空间内,可能会出现循环卡死的情况。如A->B->A反复卡在这里,然而在无穷空间处,由于分支因子无限大,因此也可能找不到解。
然而对于深度优先图搜索而言,在有限空间内是完备的,因为它会进行重复性检查。但同样的在无穷空间处仍然是不完备的。
因此深度优先在大部分情况下是不具备完备性的,且对于图搜索会出现无限分支的情况,因此可以考虑深度受限搜索DLS。
深度受限搜索DLS
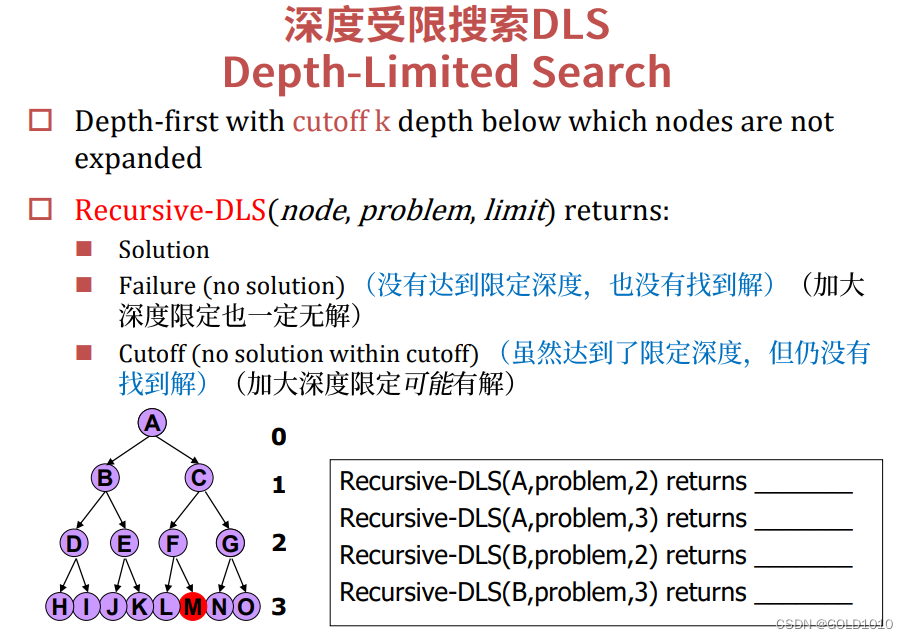
该算法的主要思想就是限制算法的搜索深度
上面四个填空题分别对应着
Cutoff,Solution,Cutoff,Failure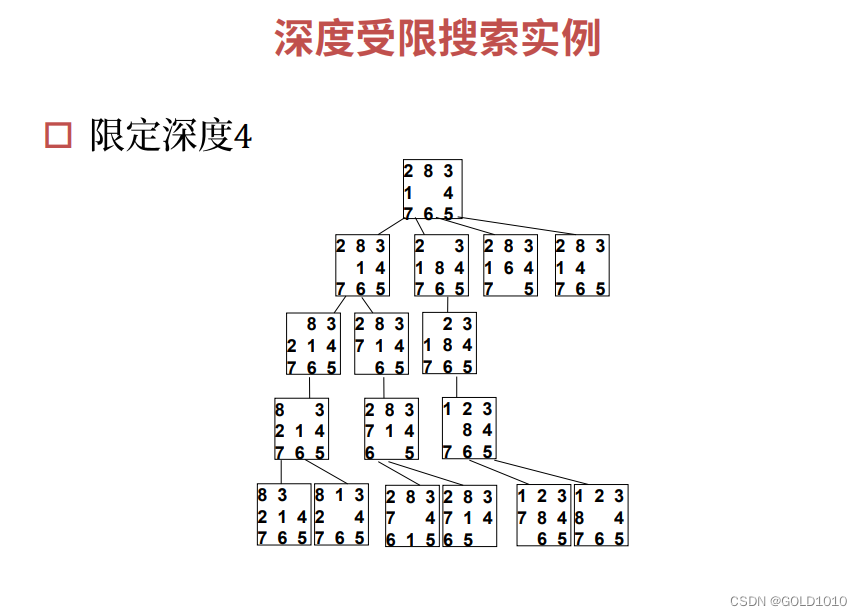
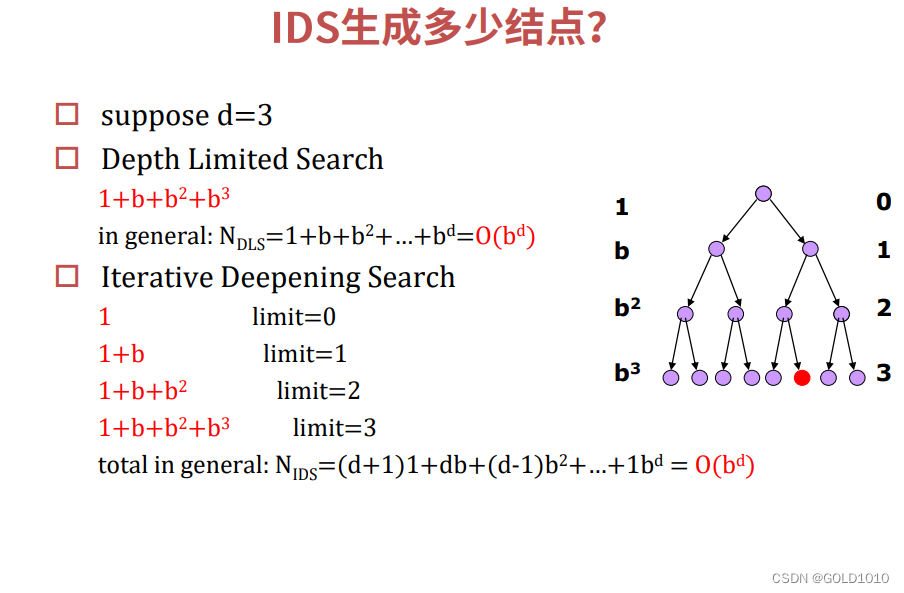
迭代加深搜索IDS
深度优先搜索策略空间复杂度低,但找不到最浅的解。
宽度优先搜索策略可以找到最浅的解,但空间复杂度较高。
因此可以考虑将深度优先搜索策略和宽度优先搜索策略进行混合
这就是迭代加深搜索的主要思想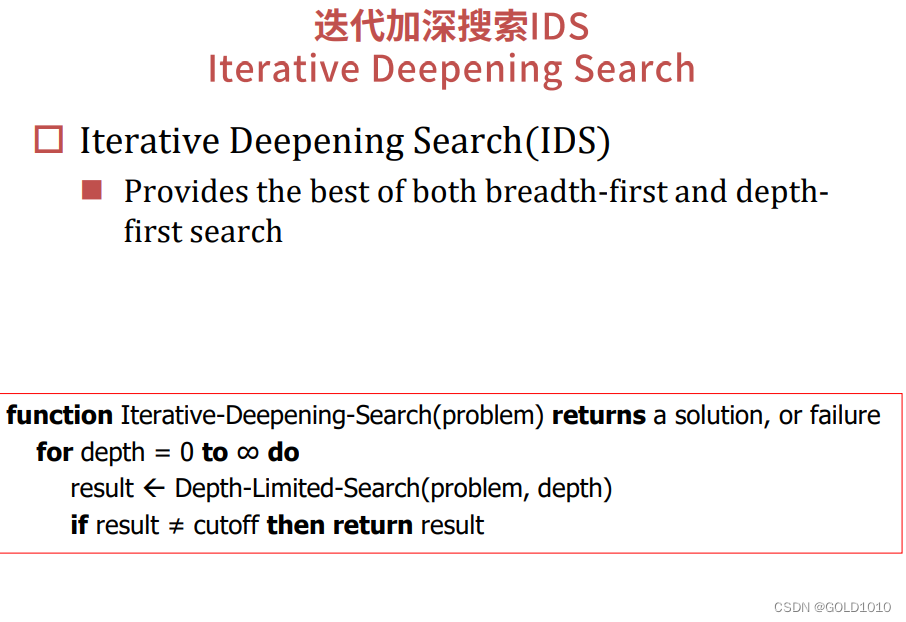
即每次都使需要搜索的深度加1,因此每次迭代至少会产生上轮迭代的所有解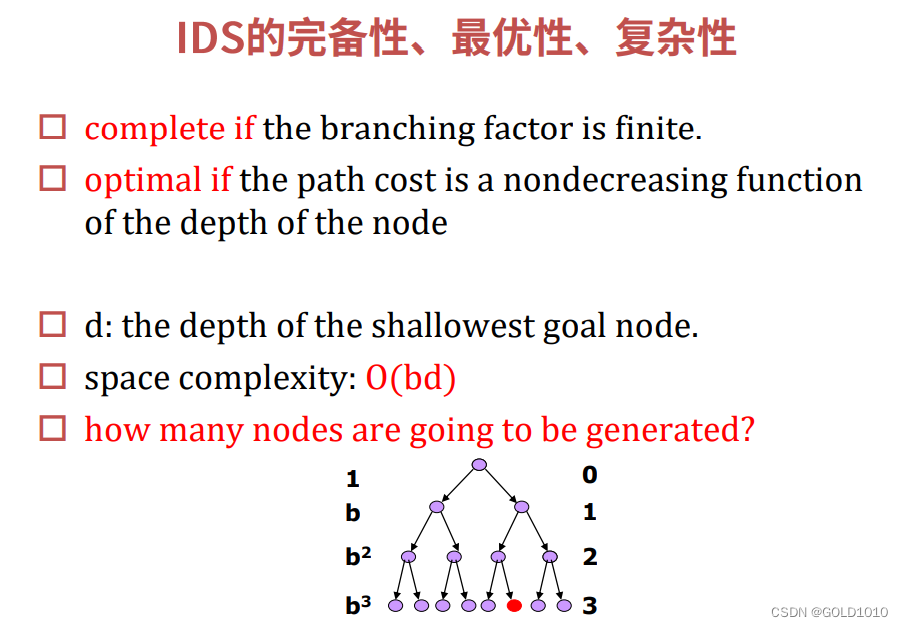
双向搜索
我们还可以考虑从初始状态出发往目标状态搜索,同时从目标状态出发往初始状态搜索
这就是双向搜索的主要思想
且两个方向都可调用不同的搜索算法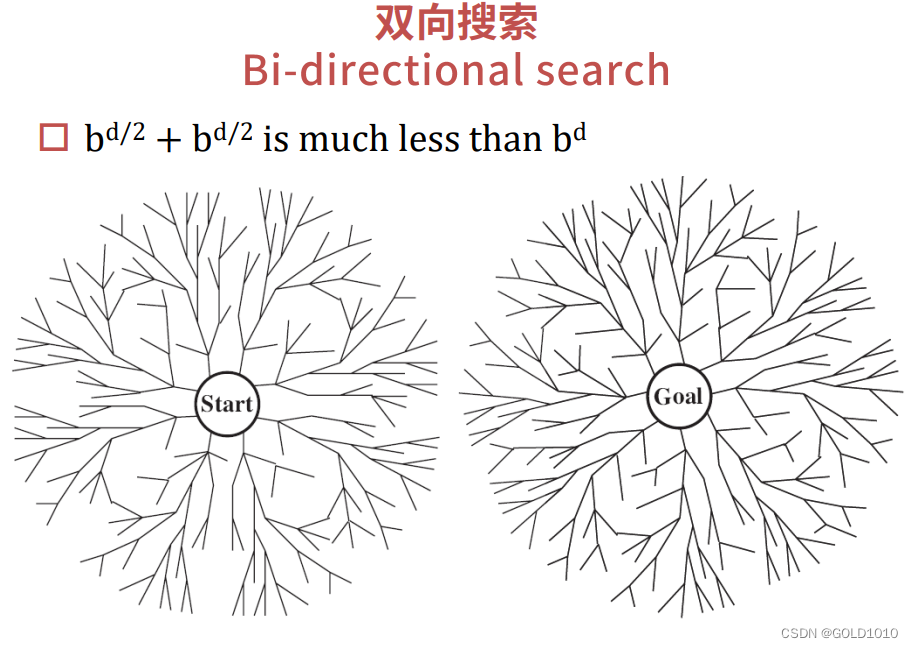
小结
| BFS | UCS | DFS | DLS | IDS | BS | |
| 完备性 | ||||||
| 最优性 | ||||||
| 时间 | ||||||
| 空间 | ||||||
| 何时进行目标测试 | 提前测试 | 正常测试 | 提前测试 | |||
| 对哪个结点进行展开 | 深度最小 | 路径代价最小 | 深度最大 |
b代表分支因子,d代表最浅解的深度,m代表搜索树的最大深度,l代表限定深度
上标a代表分支有限,上标b代表单步代价为某个正数
上标c代表单步代价相同,上标d代表两个方向都使用宽度优先搜索
提前测试:在加入frontier之前进行目标测试
正常测试:在从frontier移除之后进行目标测试


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









