







Linux的tree命令,以树状列出当前路径的目录。ubuntu默认是没有tree命令的,需要安装tree命令。
Ubuntu下有两种安装的方法:
一、通过sudo apt-get install + 包名
二、通过源码安装wget http://mama.indstate.edu/users/ice/tree/
具体安装方法:
普通用户下:
wget http://mama.indstate.edu/users/ice/tree/
解压tree安装文件
tar -zxvf tree-1.8.0.tgz
进入解压文件
cd tree-1.8.0
执行安装命令
sudo make install
详细画面:

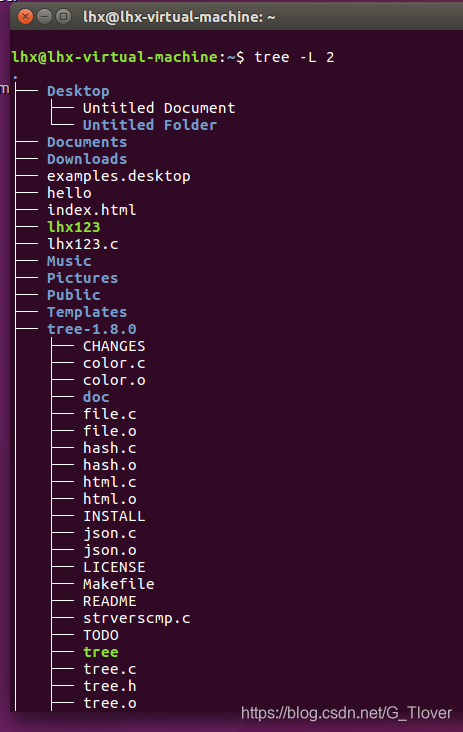
运行tree -L 2命令,查看当前路径下树状结构














 4142
4142











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









