






 文章探讨了导弹追踪敌舰的问题,通过建立微分方程模型并利用Euler迭代法求解,得出导弹击中敌舰的具体时间和位置。第二部分分析了敌舰逃脱策略,无论何种角度,敌舰都无法完全逃脱,但保持180度夹角可延长被击中时间.
文章探讨了导弹追踪敌舰的问题,通过建立微分方程模型并利用Euler迭代法求解,得出导弹击中敌舰的具体时间和位置。第二部分分析了敌舰逃脱策略,无论何种角度,敌舰都无法完全逃脱,但保持180度夹角可延长被击中时间.
#导弹追踪问题
**摘要:**导弹监测技术一定程度上反映了国家的军事实力。本文以导弹追踪问题为背景,通过建立相关常微分方程组模型,并利用Euler迭代法求解模型的数值解,最终得到在0.279小时后导弹在(25.35, 120) 处击中敌舰;敌舰察觉后,以135km/h速度不管何方向逃逸都不能避免被导弹击中,但是可与导弹呈180°夹角延长被击中时间。
##一、 问题的提出
某导弹基地发现正北方向120km处海面上有敌艇一艘以90km/h的速度向正东方向行驶。该导弹基地立即发射一枚导弹跟踪追击敌艇,导弹速度为450km/h,自动导航系统使导弹在任一时刻都能对准敌艇。
(1)试问导弹在何时何处击中敌艇?
(2)如果发射导弹时,敌舰立即由仪器觉察。假定敌舰为一高速快艇,它即刻以135km/h的速度与导弹方向成一夹角逃逸,问导弹何时何地击中敌舰?根据计算结果,你能否指出敌舰与导弹方向成何夹角逃逸才好?
##二、 问题的分析
问题一要求计算导弹击中敌舰的位置和时间,探寻导弹的追踪轨迹,首先建立合适的直角坐标系;然后通过将速度分解为水平与竖直两个方向,充分利用导弹和敌舰速度与导弹运动轨迹x,y的联系,建立微分方程组模型;最后,可基于Euler迭代法对模型进行求解,并绘制出导弹的运动轨迹。
问题二要求当敌舰它即刻以135km/h的速度与导弹方向成一夹角逃逸时,要找到导弹何时何地击中敌舰,并指出敌舰与导弹方向成何夹角逃逸才好。可以选取若干特殊逃逸角度进行计算,并通过对比不同角度得到的导弹逃逸结果,获得导弹的最佳逃逸角度与位置。
##三、 模型假设
针对以上问题,考虑各种因素对建模的影响,做出如下合理假设:
1.假设导弹调整方向的能力非常强;
2.假设导弹与敌舰相距足够近时敌舰即被击中。
##四、 模型的建立
4.1 问题一模型的建立与求解
4.1.1 建立微分方程组
对于第一问,导弹在任一时刻都能对准敌舰,导弹的飞行方向会随着时间t的改变而改变,可以知道导弹的追踪轨迹是一条随着时间变化的曲线,其中曲线上的每一点斜率方向都指向敌。因此,本文建立直角坐标系进行分析,取导弹基地为原点O(0, 0),x轴指向正东方,y轴指向正北方。
导弹从(0, 0)处出发,以450km/h的速度追击敌舰,设其t时刻的坐标为P(x, y),建立如下微分方程组如下:

##4.1.2 Euler迭代法
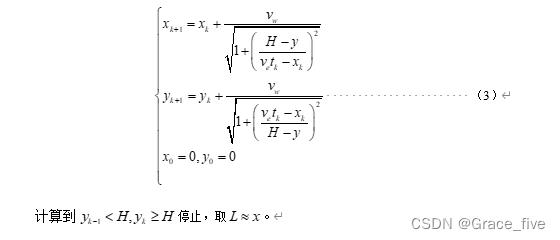
在求解微分方程的时候往往计算量很大,甚至无法求解,在解决实际问题时,只需要解出近似值,Euler迭代法是解微分方程常见的数值算法,其思想是将连续变量的微分方程改为离散变量的差分方程。将以上方程组改写为Euler格式:
##4.1.3 模型的求解
运用Maple 2015求解,程序代码:
程序代码1:
h := 0.001;
k := 1; L := 120;
Ve := 90;
Vw := 450;
x := [0]; y := [0];
while y[k] <= L do
x := [op(x), x[k]+(Ve*t-x[k])*Vw*h/sqrt((Ve*t-x[k])^2+(L-y[k])^2)];
y := [op(y), y[k]+(L-y[k])*Vw*h/sqrt((Ve*h*k-x[k])^2+(L-y[k])^2)];
t := h*k;
k := k+1
end do;
x[k]; y[k]; t;
with(plots);
p := plot([seq([x[i], y[i]], i = 1 .. k)]);
q := plot([seq([Vs*i*h, L], i = 1 .. k)]);
display(p, q)
``
##4.1.4 结果分析`
运行该程序可得,得到迭代结果如图1所示,即不同时间导弹的位置。

##4.2 问题二模型的建立与求解
对于问题二,敌舰它即刻以135km/h的速度与导弹方向成一夹角逃逸,需要找到导弹何时何地击中敌舰,并指出敌舰与导弹方向成何夹角逃逸才好。本文选取若干特殊角度进行计算,计算程序及Maple代码如下:
运用Maple 2015求解,程序代码:
程序代码2:
H := 120;
v1 := 450;
v2 := 135;
tau := .1;
theta := (1/3)*Pi;
C1 := evalf(cos(theta));
S1 := evalf(sin(theta));
xd := [0];
yd := [v1*tau];
xj := [v2*tau*S1];
yj := [C1*tau*v2+H];
L1 := [[xd[1], yd[1]]];
L2 := [[xj[1], yj[1]]];
k := 1;
d := sqrt((xd[k]-xj[k])^2+(yd[k]-yj[k])^2);
while d > 0.03 do
C := (xj[k]-xd[k])/sqrt((xj[k]-xd[k])^2+(yd[k]-yj[k])^2):
S := (yj[k]-yd[k])/sqrt((xj[k]-xd[k])^2+(yd[k]-yj[k])^2):
xd := [op(xd), C*tau*v1+xd[k]]:
yd := [op(yd), S*tau*v1+yd[k]]:
xj := [op(xj), xj[k]+v2*tau*(C*C1+S*S1)]:
yj := [op(yj), yj[k]+v2*tau*(-C*S1+C1*S)]:
L1 := [op(L1), [xd[k], yd[k]]]:
L2 := [op(L2), [xj[k], yj[k]]]:
k := k+1;
d := sqrt((xd[k]-xj[k])^2+(yd[k]-yj[k])^2)
end do;
[xd[k], yd[k]];
60*k*tau;
F := plot(L1);
G := plot(L2)
不同特殊角度敌舰被击中的时间与位置如表1。
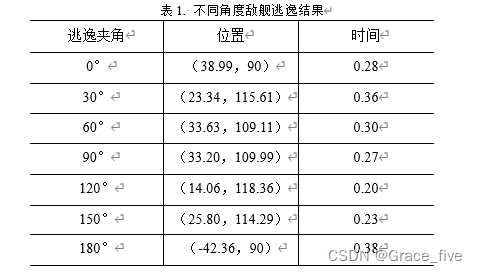
由于敌舰的速度小于导弹的速度,所以敌舰不管与导弹呈何种角度,都不可能摆脱导弹,只能尽可能拖延时间,通过表1不难发现,当敌舰和导弹保持180°角度是,逃逸的时间最长,因此,敌舰可与导弹保持180°,以获得更长时间等待救援。

















 1021
1021

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









