







1. android gps实现方案
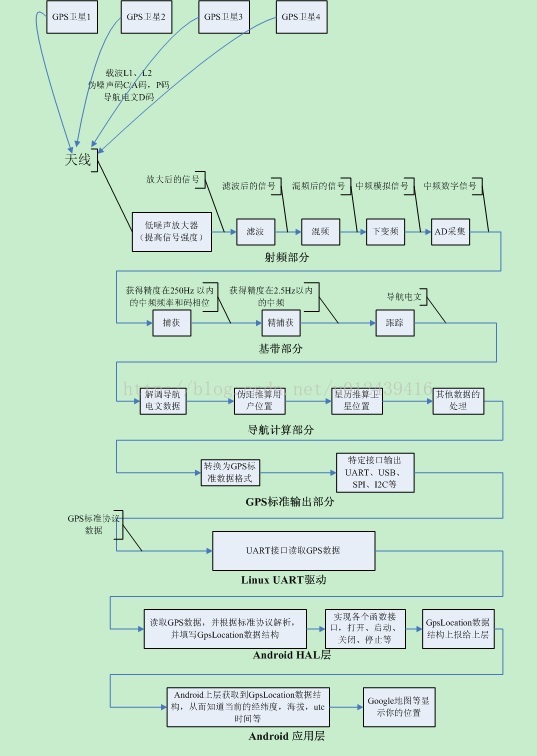
整个流程图如下,
android 系统中高通定位方案架构图如下,
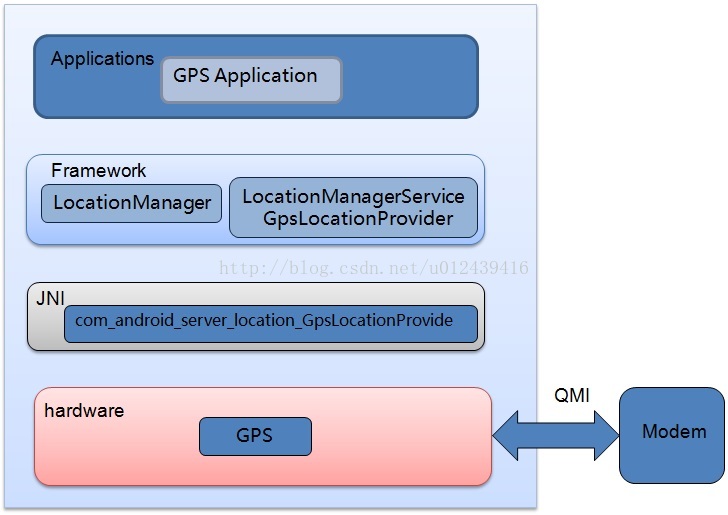
GPS Application(各种GPS定位的apk)都通过android系统的LocationManager对GPS进行打开/关闭/启动等操作。然后等待数据的上报。所以架构中有2个流程,由上往下的控制流,由下往上的数据流。
-
GPS Application和LocationManagerService所在进程通过Binder机制进行跨进程调用。
-
GpsLocationProvider和com_android_server_location_GpsLocationProvide以及com_android_server_location_GpsLocationProvide和gps.so库相互之间都是通过数据结构进行回调。其实, com_android_server_location_GpsLocationProvide只是Framework和HAL之间的一个桥梁。
-
HAL的gps.so库和Modem通过高通的QMI机制进行数据传输,并且数据的格式是NMEA类型。
2. gps数据结构
\hardware\libhardware\include\hardware\gps.h,定义了GPS底层相关的结构体和接口;GpsLocation 包含经纬度海拔,速度,定位的精度等卫星信息;
typedef struct {
size_t size;
uint16_t flags;
double latitude;
double longitude;
double altitude;
float speed;
float bearing;
float accuracy;
GpsUtcTime timestamp;
} GpsLocation;
GpsStatus:GPS的状态;
typedef struct {
size_t size;
GpsStatusValue status;
} GpsStatus;
status有未知、正在定位、停止定位、启动未定义、未启动五种状态,
typedef uint16_t GpsStatusValue;
#define GPS_STATUS_NONE 0
#define GPS_STATUS_SESSION_BEGIN 1
#define GPS_STATUS_SESSION_END 2
#define GPS_STATUS_ENGINE_ON 3
#define GPS_STATUS_ENGINE_OFF 4
GpsSvInfo 包含卫星ID、信噪比等信息,定义如下,
typedef struct {
size_t size;
int prn;
float snr;
float elevation;
float azimuth;
} GpsSvInfo;
GpsSvStatus 包含可视卫星数、星历时间、年历时间等信息;
typedef struct {
size_t size;
int num_svs;
GpsSvInfo sv_list[GPS_MAX_SVS];
uint32_t ephemeris_mask;
uint32_t almanac_mask;
uint32_t used_in_fix_mask;
} GpsSvStatus;
GpsCallbacks对应JNI的回调方法,
typedef struct {
size_t size;
gps_location_callback location_cb;
gps_status_callback status_cb;
gps_sv_status_callback sv_status_cb;
gps_nmea_callback nmea_cb;
gps_set_capabilities set_capabilities_cb;
gps_acquire_wakelock acquire_wakelock_cb;
gps_release_wakelock release_wakelock_cb;
gps_create_thread create_thread_cb;
gps_request_utc_time request_utc_time_cb;
} GpsCallbacks;
GpsInterface:JNI层通过此接口与HAL进行交互;
typedef struct {
size_t size;
int (*init)( GpsCallbacks* callbacks );
int (*start)( void );
int (*stop)( void );
void (*cleanup)( void );
int (*inject_time)(GpsUtcTime time, int64_t timeReference,
int uncertainty);
int (*inject_location)(double latitude, double longitude, float accuracy);
void (*delete_aiding_data)(GpsAidingData flags);
int (*set_position_mode)(GpsPositionMode mode, GpsPositionRecurrence recurrence,
uint32_t min_interval, uint32_t preferred_accuracy, uint32_t preferred_time);
const void* (*get_extension)(const char* name);
} GpsInterface;
gps_device_t:GPS设备结构体,继承自hw_device_t,硬件适配接口,向上层提供了get_gps_interface接口;
struct gps_device_t {
struct hw_device_t common;
const GpsInterface* (*get_gps_interface)(struct gps_device_t* dev);
};
小结:
-
介绍了android系统中gps的结构;
-
分析了gps中基本的数据结构以及含义。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









