






基于五次多项式的路径跟踪控制算法
适应无人驾驶路径跟踪,自动泊车路径跟踪
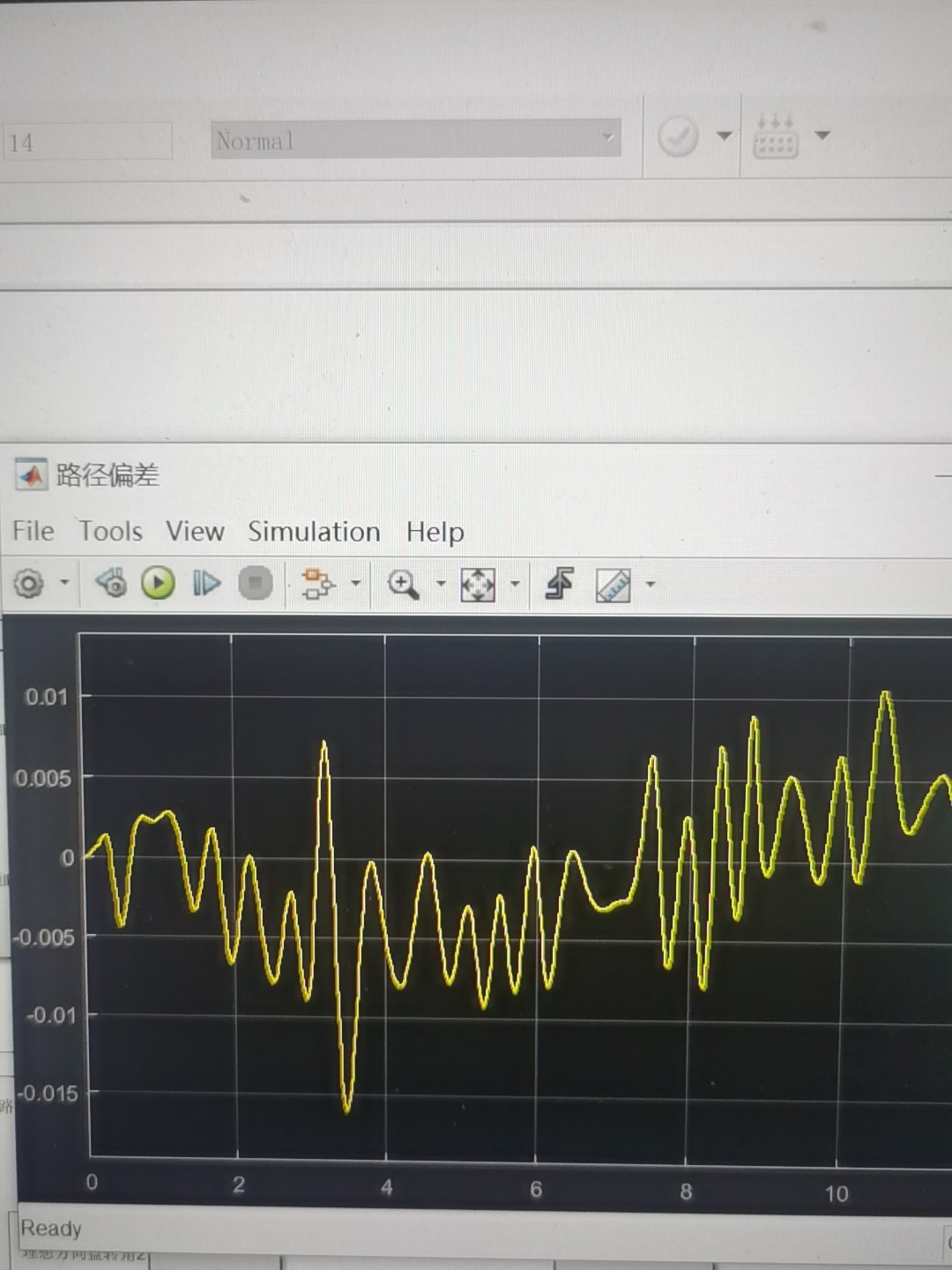
可输出横向偏差图,质心侧偏角等图
仅供学习算法使用
ID:2580672860337863
xhusj
标题:基于五次多项式的路径跟踪控制算法在无人驾驶与自动泊车中的应用
摘要:
近年来,随着无人驾驶技术的快速发展,路径跟踪控制算法成为了研究的热点之一。本文介绍了一种基于五次多项式的路径跟踪控制算法,该算法适用于无人驾驶与自动泊车,具有输出横向偏差图、质心侧偏角等图的功能,以满足学习算法的需求。本文旨在深入分析该算法的原理、应用场景以及相关实验结果,为研究人员提供参考。
-
引言
无人驾驶和自动泊车技术的快速发展为路径跟踪控制算法的研究提供了机遇与挑战。在实际应用中,路径跟踪控制算法扮演着重要的角色,通过对车辆的动态预测和控制,实现车辆在复杂环境下的精确驾驶和泊车。 -
五次多项式路径跟踪算法原理
五次多项式路径跟踪算法通过构建多项式函数来描述车辆的路径,实现对车辆运动的精确控制。本节将详细介绍该算法的原理和数学模型,并结合图表进行阐述。 -
路径跟踪算法的应用
本节主要介绍五次多项式路径跟踪算法在无人驾驶和自动泊车领域的具体应用。通过对实际案例的分析,展示了该算法在车辆路径规划和控制方面的优势。 -
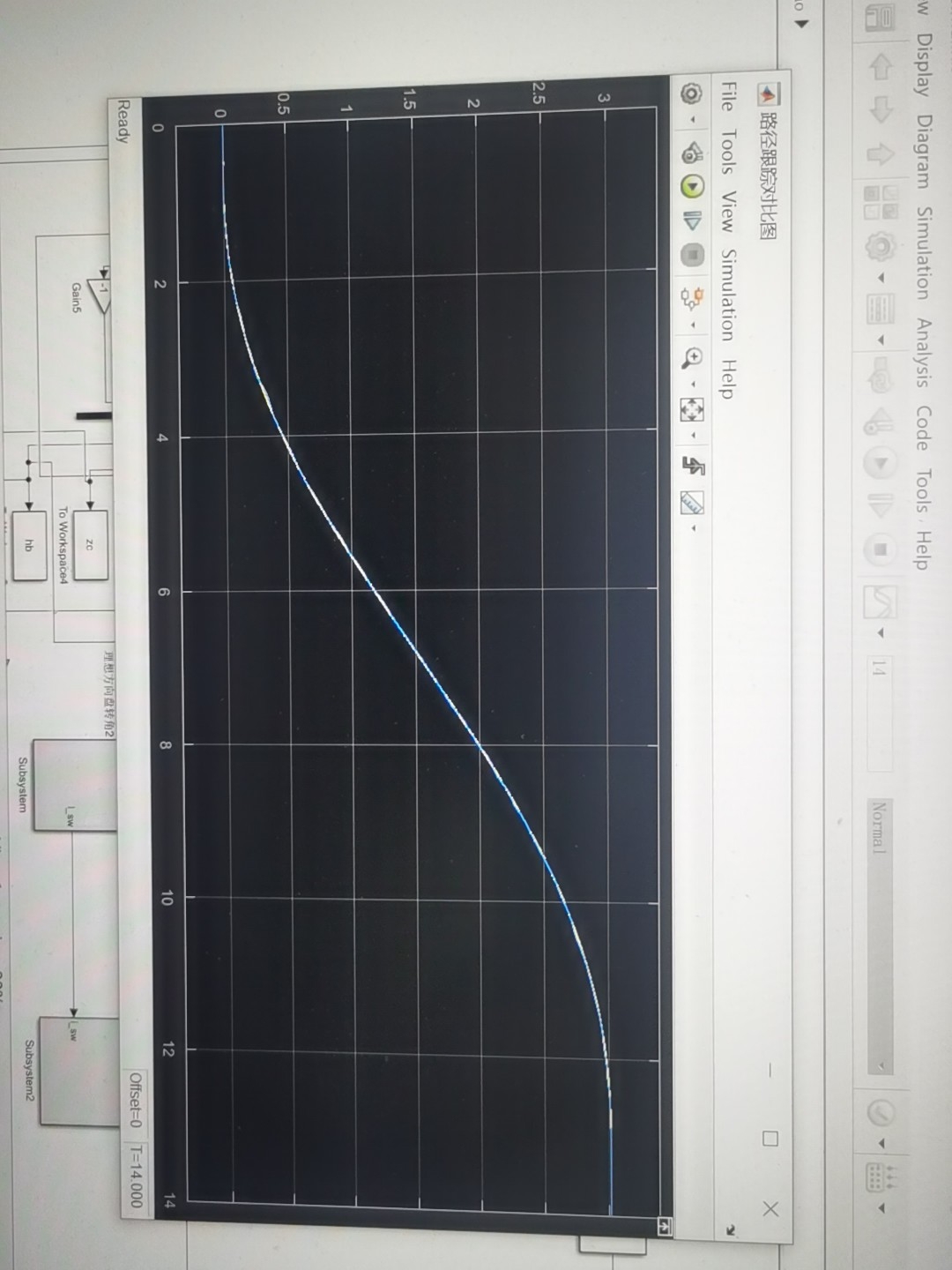
实验与结果分析
为验证五次多项式路径跟踪算法的有效性和性能,本文进行了一系列实验,并对实验结果进行了详细分析。通过比较实验数据和理论模型,验证了该算法在路径跟踪控制中的可行性和准确性。 -
总结
本文综述了基于五次多项式的路径跟踪控制算法在无人驾驶与自动泊车中的应用。通过对该算法的原理、应用和实验结果的详细介绍,深入分析了其在路径跟踪控制领域的优势和局限性。我们期望本文能够为研究人员提供有益的信息和思路,推动路径跟踪控制算法的发展和应用。
关键词:路径跟踪控制、无人驾驶、自动泊车、五次多项式、横向偏差图、质心侧偏角、学习算法
相关的代码,程序地址如下:http://wekup.cn/672860337863.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









