






该模型采样反电势积分法进行无传感器控制
反电势积分法 又被称为开环磁链法或磁链观测法。
永磁同步电机磁场定向控制的关键是获得准确的转子磁链矢量,并以此求出转子位置信息。
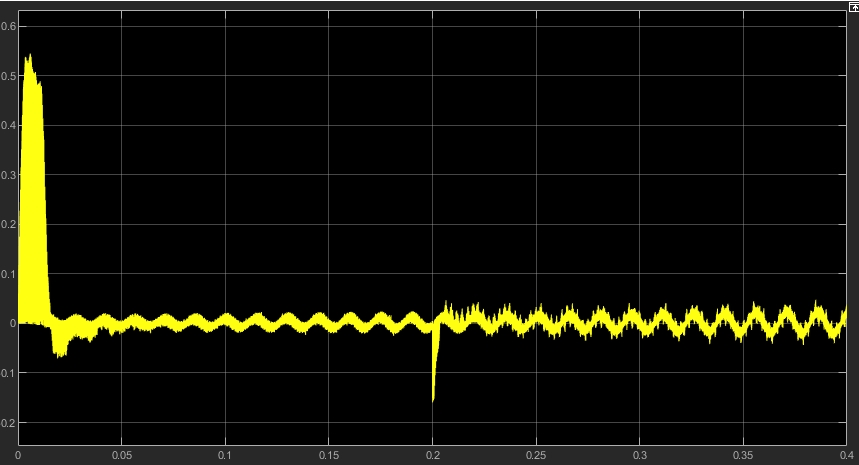
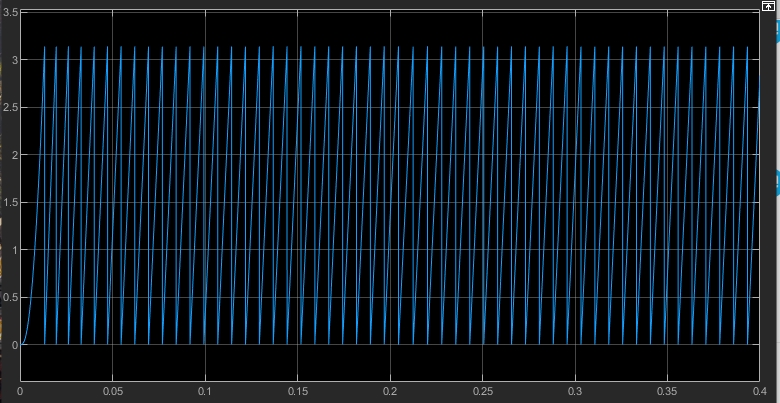
根据永磁同步电机在 α - β 坐标系中的定子电压方程和定转子磁链关系进行积分和反三角函数运算,进一步求出转子位置角度和转速.
ID:61148659201629911
Keepmoving

无传感器控制在永磁同步电机磁场定向控制中扮演着至关重要的角色。传统的永磁同步电机控制方法需要使用传感器来获取转子位置信息,但是这种方法存在成本高、安装复杂等问题。而采用反电势积分法,即开环磁链法或磁链观测法,可以实现无传感器控制。本文将对该方法进行深入分析和探讨。
反电势积分法的核心思想是通过积分和反三角函数运算,获得准确的转子磁链矢量,并以此求出转子位置信息。具体来说,在永磁同步电机的 α - β 坐标系中,通过定子电压方程和定转子磁链关系进行积分和反三角函数运算,可以进一步求解出转子位置角度和转速。
采用反电势积分法进行无传感器控制的过程如下:
- 根据永磁同步电机的数学模型,建立起定子电压方程和定转子磁链关系。
- 将定子电压方程和定转子磁链关系进行积分运算,得到转子位置角度的估计值。
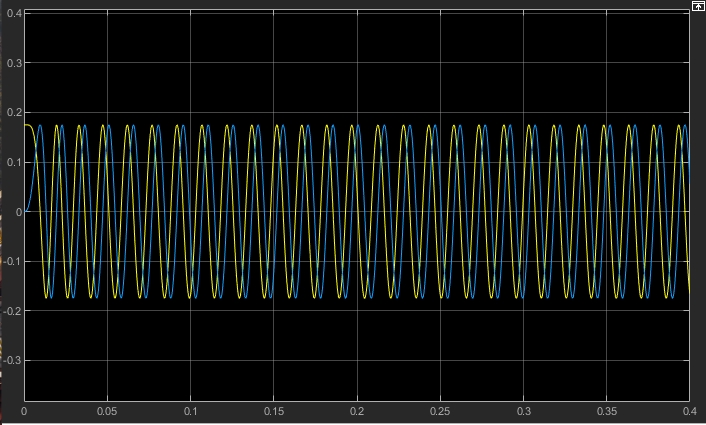
- 通过估计值和实际输出值之间的比较,利用反馈控制算法对估计值进行修正,以提高准确性。
- 根据修正后的估计值,再次进行积分和反三角函数运算,得到更准确的转子位置信息。
- 根据转子位置信息,通过逆变器控制电机的电流,使电机的磁场与预期的磁场方向保持一致,从而实现磁场定向控制。
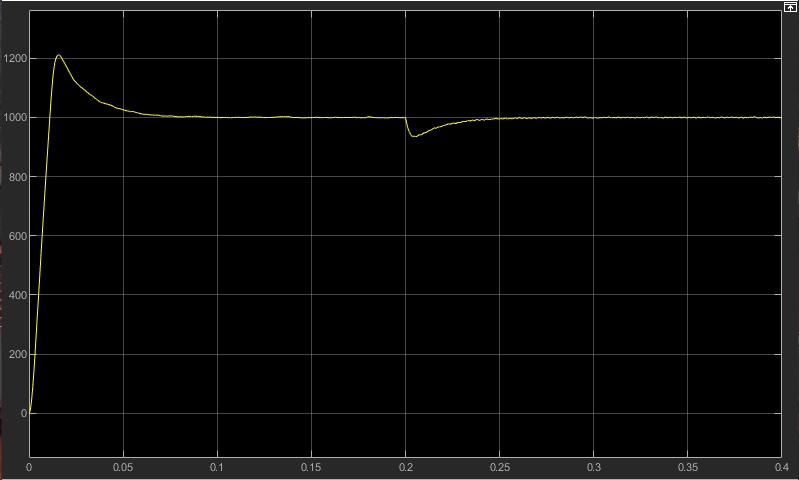
反电势积分法的优势在于无需传感器即可获取准确的转子位置信息,降低了成本和安装难度。同时,该方法具有较高的鲁棒性和动态响应能力,在转速变化较大的情况下仍能保持稳定的控制效果。
然而,反电势积分法也存在一些局限性。首先,该方法对电机的参数变化较为敏感,参数的变化会直接影响到估计值的准确性。其次,由于积分环节的存在,反电势积分法对于低速和静止转子的控制效果较差。此外,积分环节还会引入累计误差,影响系统的稳定性。
综上所述,反电势积分法作为一种无传感器控制方法,为永磁同步电机磁场定向控制提供了一种简化和经济的解决方案。但是,要充分发挥其优势,需要对电机参数进行准确的建模和估计,以及对积分环节进行合理的设计和优化。未来的研究可以从这些方面深入探索和改进,进一步提升反电势积分法在无传感器控制领域的应用性能。
相关的代码,程序地址如下:http://coupd.cn/659201629911.html
















 952
952











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









