






碎碎念:这一届我写着有点卡壳的地方应该在不同配置下超声波的触发方式,之前我那种方式进中断实际很由可能时上一次测距指令的结果,但这次明显需要立即得出结果,所以这次我直接把数据计算放到中断中计算.
一.题目要求
个人的一些见解:
首先是触发方式的改变,之前是一直进行测距,现在对触发条件有了一定的控制,所以我Measure_Distance不再放到之前的定时器中定时触发,而是在主循环中
void Measure_Distance()
{
unsigned char temp;
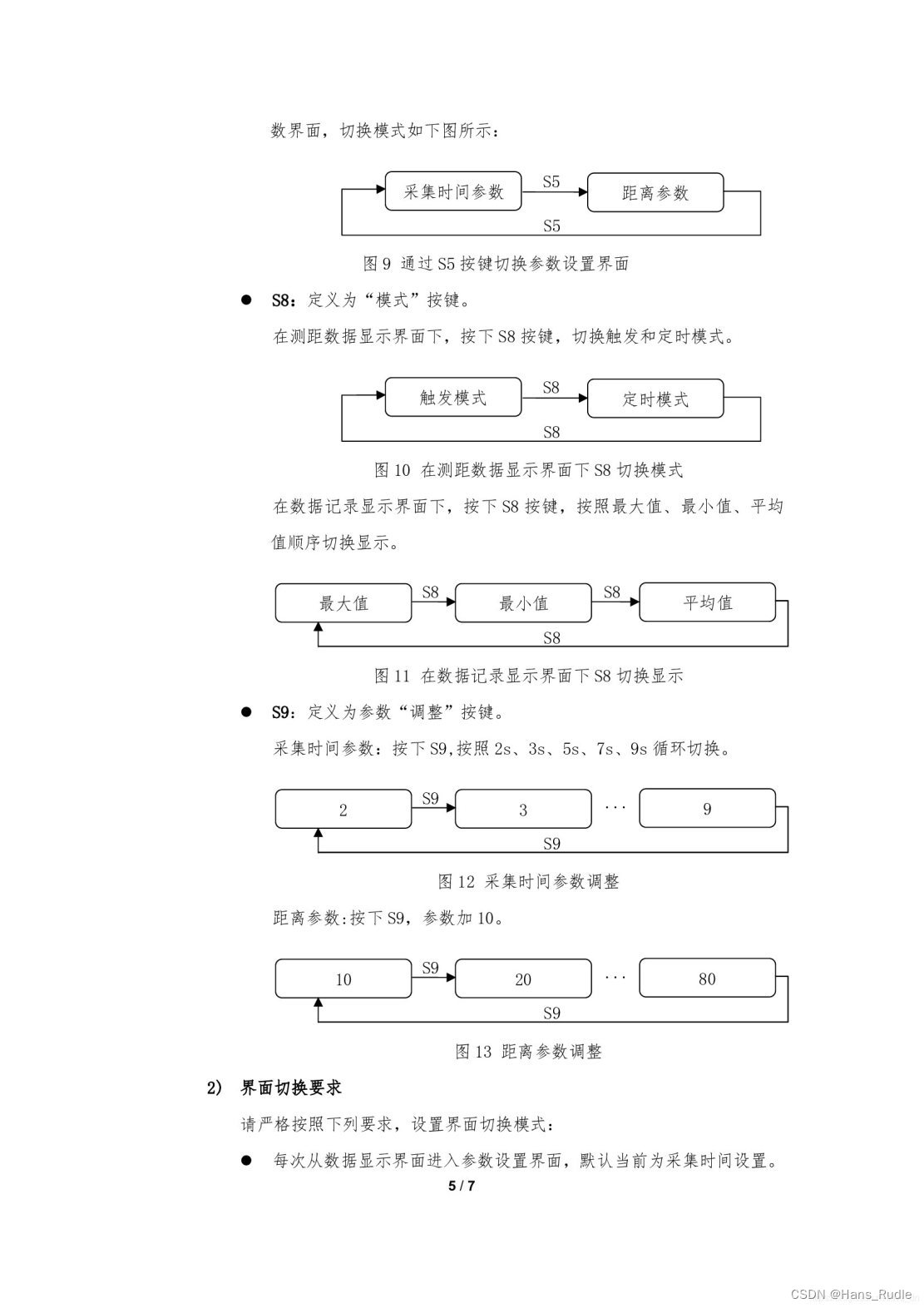
if(Dis_Mode==1) //定时模式
{
temp=sec/16+sec%16; //BCD转十进制
if((temp%Dis_times==0)&&PCA_Flag==0)
{
CH=0;CL=0;
Send_Wave();
CR=1;
PCA_Flag=1;
}
if(temp%Dis_times!=0)
{
PCA_Flag=0;
}
}
if(Dis_Mode==2)//触发模式
{
if(ADC_Value<80&&PCA_Flag==0)
{
PCA_Flag=1;
CH=0;CL=0;
Send_Wave();
CR=1;
}
if(ADC_Value>80)
{
PCA_Flag=0;
}
}
}之后便是数据处理,为了保持实时性,我直接在中断里完成数据的计算和处理
void PCA_Service() interrupt 7
{
CR=0;
if(CF==1)
{
CF=0;
Distance=255;
LED_times=0;
}
if(CCF0==1)
{
CCF0=0;
PCA_times=CCAP0H<<8|CCAP0L;
Distance=PCA_times*0.017;//计算距离
chufa_times++;
Dis_sum+=Distance;
Dis_aver=(float)Dis_sum/chufa_times;
Dis_aver_smg=Dis_aver*10;
if(Distance>Dis_max)
{
Dis_max=Distance;
}
if(Distance<Dis_min)
{
Dis_min=Distance;
} //最值和平均值的处理
if(Dis_Mode==1) //有效次数的判定
{
if(Distance<=(Dis_param+5)&&Distance>=(Dis_param-5))
{
LED_times++;
}
if(Distance>(Dis_param+5)||Distance<(Dis_param-5))
{
LED_times=0;
}
}
}
}二.代码实现:
main.c
#include <STC15F2K60S2.H>
#include "intrins.h"
#include "ds1302.h"
#include "iic.h"
sbit C1=P4^4;
sbit C2=P4^2;
sbit R1=P3^2;
sbit R2=P3^3;
sbit TX=P1^0;
code unsigned char SMG_Nodot[] =
{0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e};
code unsigned char SMG_Dot[] =
{0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10};
unsigned char SMG_Mode=1;
unsigned char hour,min,sec;
unsigned char Dis_Mode=2;
unsigned char Distance;
unsigned char show_Mode=1;
unsigned char Dis_max;
float Dis_aver;
unsigned int Dis_aver_smg;
unsigned char Dis_min=255;
unsigned char Dis_times=2;
unsigned char Dis_param=20;
unsigned char Dis_times_temp=2;
unsigned char Dis_param_temp=20;
unsigned char param_Mode=1;
bit PCA_Flag=1;
unsigned int PCA_times;
unsigned char times;
unsigned char chufa_times=0;
unsigned int Dis_sum=0;
unsigned char ADC_Value;
unsigned char DAC_Value;
unsigned char LED_Mode=0xff;
unsigned char LED_times=0;
unsigned char LED_Flag;
void Delay_SMG(unsigned int t)
{
while(t--);
}
void Delay12us() //@12.000MHz
{
unsigned char i;
_nop_();
_nop_();
i = 33;
while (--i);
}
void Send_Wave()
{
unsigned char i;
for(i=0;i<8;i++)
{
TX=1;
Delay12us();
TX=0;
Delay12us();
}
}
void SelectHC573(unsigned char channel,unsigned char dat)
{
P0=dat;
switch(channel)
{
case 4:
P2=(P2&0x1f)|0x80;
break;
case 5:
P2=(P2&0x1f)|0xa0;
break;
case 6:
P2=(P2&0x1f)|0xc0;
break;
case 7:
P2=(P2&0x1f)|0xe0;
break;
case 0:
P2=(P2&0x1f)|0x00;
break;
}
P2=(P2&0x1f)|0x00;
}
void Display_SMG(unsigned char pos,unsigned char dat)
{
SelectHC573(6,0x01<<(pos-1));
SelectHC573(7,dat);
Delay_SMG(500);
SelectHC573(6,0x01<<(pos-1));
SelectHC573(7,0xff);
}
void Display_Dynamic()
{
if(SMG_Mode==1)
{
Display_SMG(1,SMG_Nodot[hour/16]);
Display_SMG(2,SMG_Nodot[hour%16]);
Display_SMG(3,0xbf);
Display_SMG(4,SMG_Nodot[min/16]);
Display_SMG(5,SMG_Nodot[min%16]);
Display_SMG(6,0xbf);
Display_SMG(7,SMG_Nodot[sec/16]);
Display_SMG(8,SMG_Nodot[sec%16]);
}
if(SMG_Mode==2)
{
Display_SMG(1,0xc7);
if(Dis_Mode==1)
{
Display_SMG(2,SMG_Nodot[12]);
}
if(Dis_Mode==2)
{
Display_SMG(2,SMG_Nodot[15]);
}
if(Distance>99)
{
Display_SMG(6,SMG_Nodot[Distance/100]);
}
if(Distance>9)
{
Display_SMG(7,SMG_Nodot[Distance%100/10]);
}
Display_SMG(8,SMG_Nodot[Distance%10]);
}
if(SMG_Mode==3)
{
Display_SMG(1,0x89);
if(show_Mode==1)
{
Display_SMG(2,0xfe);
if(Dis_max>999)
{
Display_SMG(5,SMG_Nodot[Dis_max/1000]);
}
if(Dis_max>99)
{
Display_SMG(6,SMG_Nodot[Dis_max%1000/100]);
}
if(Dis_max>9)
{
Display_SMG(7,SMG_Nodot[Dis_max%100/10]);
}
Display_SMG(8,SMG_Nodot[Dis_max%10]);
}
if(show_Mode==2)
{
Display_SMG(2,0xbf);
if(Dis_aver_smg>999)
{
Display_SMG(5,SMG_Nodot[Dis_aver_smg/1000]);
}
if(Dis_aver_smg>99)
{
Display_SMG(6,SMG_Nodot[Dis_aver_smg%1000/100]);
}
Display_SMG(7,SMG_Dot[Dis_aver_smg%100/10]);
Display_SMG(8,SMG_Nodot[Dis_aver_smg%10]);
}
if(show_Mode==3)
{
Display_SMG(2,0xf7);
if(Dis_min>999)
{
Display_SMG(5,SMG_Nodot[Dis_min/1000]);
}
if(Dis_min>99)
{
Display_SMG(6,SMG_Nodot[Dis_min%1000/100]);
}
if(Dis_min>9)
{
Display_SMG(7,SMG_Nodot[Dis_min%100/10]);
}
Display_SMG(8,SMG_Nodot[Dis_min%10]);
}
}
if(SMG_Mode==4)
{
Display_SMG(1,0x8c);
Display_SMG(2,SMG_Nodot[param_Mode]);
if(param_Mode==1)
{
Display_SMG(7,SMG_Nodot[Dis_times/10]);
Display_SMG(8,SMG_Nodot[Dis_times%10]);
}
if(param_Mode==2)
{
Display_SMG(7,SMG_Nodot[Dis_param/10]);
Display_SMG(8,SMG_Nodot[Dis_param%10]);
}
}
}
void PCA_Init()
{
CMOD=0x01;
CCON=0x00;
CCAPM0=0x11;
EA=1;
}
void Measure_Distance()
{
unsigned char temp;
if(Dis_Mode==1)
{
temp=sec/16+sec%16;
if((temp%Dis_times==0)&&PCA_Flag==0)
{
CH=0;CL=0;
Send_Wave();
CR=1;
PCA_Flag=1;
}
if(temp%Dis_times!=0)
{
PCA_Flag=0;
}
}
if(Dis_Mode==2)
{
if(ADC_Value<80&&PCA_Flag==0)
{
PCA_Flag=1;
CH=0;CL=0;
Send_Wave();
CR=1;
}
if(ADC_Value>80)
{
PCA_Flag=0;
}
}
}
void PCA_Service() interrupt 7
{
CR=0;
if(CF==1)
{
CF=0;
Distance=255;
LED_times=0;
}
if(CCF0==1)
{
CCF0=0;
PCA_times=CCAP0H<<8|CCAP0L;
Distance=PCA_times*0.017;
chufa_times++;
Dis_sum+=Distance;
Dis_aver=(float)Dis_sum/chufa_times;
Dis_aver_smg=Dis_aver*10;
if(Distance>Dis_max)
{
Dis_max=Distance;
}
if(Distance<Dis_min)
{
Dis_min=Distance;
}
if(Dis_Mode==1)
{
if(Distance<=(Dis_param+5)&&Distance>=(Dis_param-5))
{
LED_times++;
}
if(Distance>(Dis_param+5)||Distance<(Dis_param-5))
{
LED_times=0;
}
}
}
}
void DS1302_Config()
{
Write_Ds1302_Byte(0x8e,0x00);
Write_Ds1302_Byte(0x80,0x01);
Write_Ds1302_Byte(0x82,0x20);
Write_Ds1302_Byte(0x84,0x20);
Write_Ds1302_Byte(0x8e,0x80);
}
void DS1302_Read()
{
hour=Read_Ds1302_Byte(0x85);
min=Read_Ds1302_Byte(0x83);
sec=Read_Ds1302_Byte(0x81);
}
void ADC_Read()
{
I2CStart();
I2CSendByte(0x90);
I2CWaitAck();
I2CSendByte(0x41);
I2CWaitAck();
I2CStop();
I2CStart();
I2CSendByte(0x91);
I2CWaitAck();
ADC_Value=I2CReceiveByte();
I2CSendAck(1);
I2CStop();
}
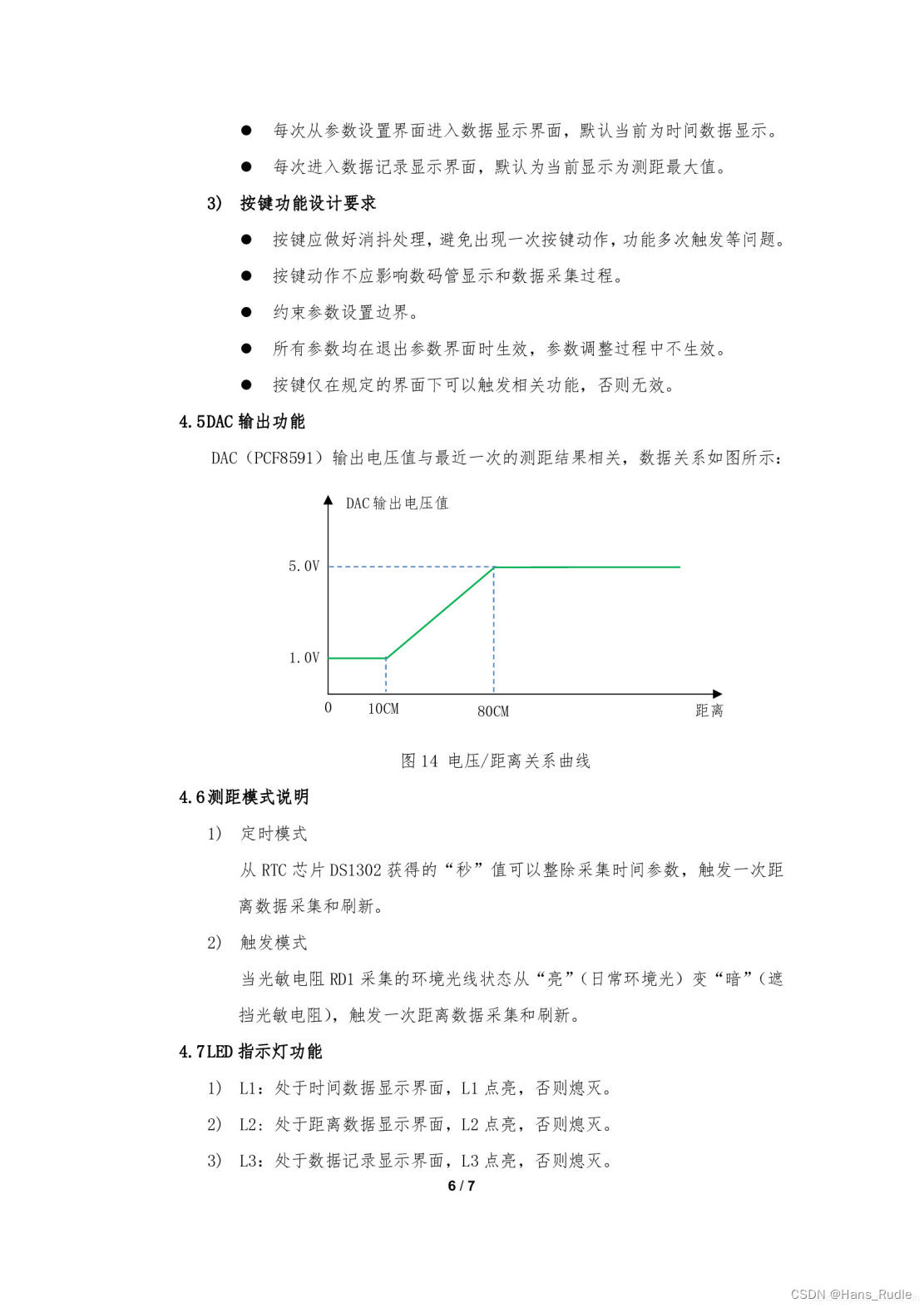
void DAC_Caculate()
{
float k;
k=204.0/70.0;
if(Distance>80)
{
DAC_Value=255;
}
if(Distance<10)
{
DAC_Value=51;
}
if(Distance>10&&Distance<80)
{
DAC_Value=k*(Distance-10)+51;
}
}
void DAC_Write()
{
DAC_Caculate();
I2CStart();
I2CSendByte(0x90);
I2CWaitAck();
I2CSendByte(0x41);
I2CWaitAck();
I2CSendByte(DAC_Value);
I2CWaitAck();
I2CStop();
}
void Scan_Key()
{
C1=0;C2=1;
R1=R2=1;
if(R1==0)
{
Delay_SMG(500);
if(R1==0)
{
if(SMG_Mode!=4)
{
switch(SMG_Mode)
{
case 1:
SMG_Mode=2;
break;
case 2:
SMG_Mode=3;
show_Mode=1;
break;
case 3:
SMG_Mode=1;
break;
}
}
if(SMG_Mode==4)
{
switch(param_Mode)
{
case 1:
param_Mode=2;
break;
case 2:
param_Mode=1;
break;
}
}
}
while(R1==0)
{
Display_Dynamic();
DS1302_Read();
ADC_Read();
}
}
if(R2==0)
{
Delay_SMG(500);
if(R2==0)
{
if(SMG_Mode!=4)
{
SMG_Mode=4;
param_Mode=1;
}
else if(SMG_Mode==4)
{
SMG_Mode=1;
Dis_times=Dis_times_temp;
Dis_param=Dis_param_temp;
}
}
while(R2==0)
{
Display_Dynamic();
DS1302_Read();
ADC_Read();
}
}
C1=1;C2=0;
R1=R2=1;
if(R1==0)
{
Delay_SMG(500);
if(R1==0)
{
if(SMG_Mode==4)
{
if(param_Mode==1)
{
switch(Dis_times)
{
case 2:
Dis_times=3;
break;
case 3:
Dis_times=5;
break;
case 5:
Dis_times=7;
break;
case 7:
Dis_times=9;
break;
case 9:
Dis_times=2;
break;
}
}
if(param_Mode==2)
{
Dis_param+=10;
if(Dis_param>80)
{
Dis_param=10;
}
}
}
while(R1==0)
{
Display_Dynamic();
DS1302_Read();
}
}
}
if(R2==0)
{
Delay_SMG(500);
if(R2==0)
{
if(SMG_Mode==2)
{
switch(Dis_Mode)
{
case 1:
Dis_Mode=2;
break;
case 2:
Dis_Mode=1;
LED_times=0;
break;
}
}
if(SMG_Mode==3)
{
switch(show_Mode)
{
case 1:
show_Mode=2;
break;
case 2:
show_Mode=3;
break;
case 3:
show_Mode=1;
break;
}
}
}
while(R2==0)
{
Display_Dynamic();
DS1302_Read();
ADC_Read();
}
}
}
void LED_Control()
{
LED_Mode|=0x07;
if(SMG_Mode==1)
{
LED_Mode=(LED_Mode|0x07)&0xfe;
}
if(SMG_Mode==2)
{
LED_Mode=(LED_Mode|0x07)&0xfd;
}
if(SMG_Mode==3)
{
LED_Mode=(LED_Mode|0x07)&0xfb;
}
if(Dis_Mode==2)
{
LED_Mode&=0xf7;
}
if(Dis_Mode!=2)
{
LED_Mode|=0x08;
}
if(LED_times>=3)
{
LED_Mode&=0xef;
}
if(LED_times<3)
{
LED_Mode|=0x10;
}
if(ADC_Value>80)
{
LED_Mode&=0xdf;
}
if(ADC_Value<80)
{
LED_Mode|=0x20;
}
SelectHC573(4,LED_Mode);
}
void Sys_Init()
{
SelectHC573(4,0xff);
SelectHC573(5,0x00);
DS1302_Config();
PCA_Init();
}
void main()
{
Sys_Init();
while(1)
{
Display_Dynamic();
DS1302_Read();
Scan_Key();
DAC_Write();
ADC_Read();
Measure_Distance();
LED_Control();
}
}iic.c
/* # I2C代码片段说明
1. 本文件夹中提供的驱动代码供参赛选手完成程序设计参考。
2. 参赛选手可以自行编写相关代码或以该代码为基础,根据所选单片机类型、运行速度和试题
中对单片机时钟频率的要求,进行代码调试和修改。
*/
#include <STC15F2K60S2.H>
#include "intrins.h"
sbit scl=P2^0;
sbit sda=P2^1;
#define DELAY_TIME 10
//
static void I2C_Delay(unsigned char n)
{
do
{
_nop_();_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();_nop_();
}
while(n--);
}
//
void I2CStart(void)
{
sda = 1;
scl = 1;
I2C_Delay(DELAY_TIME);
sda = 0;
I2C_Delay(DELAY_TIME);
scl = 0;
}
//
void I2CStop(void)
{
sda = 0;
scl = 1;
I2C_Delay(DELAY_TIME);
sda = 1;
I2C_Delay(DELAY_TIME);
}
//
void I2CSendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++){
scl = 0;
I2C_Delay(DELAY_TIME);
if(byt & 0x80){
sda = 1;
}
else{
sda = 0;
}
I2C_Delay(DELAY_TIME);
scl = 1;
byt <<= 1;
I2C_Delay(DELAY_TIME);
}
scl = 0;
}
//
unsigned char I2CReceiveByte(void)
{
unsigned char da;
unsigned char i;
for(i=0;i<8;i++){
scl = 1;
I2C_Delay(DELAY_TIME);
da <<= 1;
if(sda)
da |= 0x01;
scl = 0;
I2C_Delay(DELAY_TIME);
}
return da;
}
//
unsigned char I2CWaitAck(void)
{
unsigned char ackbit;
scl = 1;
I2C_Delay(DELAY_TIME);
ackbit = sda;
scl = 0;
I2C_Delay(DELAY_TIME);
return ackbit;
}
//
void I2CSendAck(unsigned char ackbit)
{
scl = 0;
sda = ackbit;
I2C_Delay(DELAY_TIME);
scl = 1;
I2C_Delay(DELAY_TIME);
scl = 0;
sda = 1;
I2C_Delay(DELAY_TIME);
}
ds1302.c
/* # DS1302代码片段说明
1. 本文件夹中提供的驱动代码供参赛选手完成程序设计参考。
2. 参赛选手可以自行编写相关代码或以该代码为基础,根据所选单片机类型、运行速度和试题
中对单片机时钟频率的要求,进行代码调试和修改。
*/
#include <STC15F2K60S2.H>
#include "intrins.h"
sbit SCK=P1^7;
sbit SDA=P2^3;
sbit RST=P1^3;
//
void Write_Ds1302(unsigned char temp)
{
unsigned char i;
for (i=0;i<8;i++)
{
SCK = 0;
SDA = temp&0x01;
temp>>=1;
SCK=1;
}
}
//
void Write_Ds1302_Byte( unsigned char address,unsigned char dat )
{
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
Write_Ds1302(dat);
RST=0;
}
//
unsigned char Read_Ds1302_Byte ( unsigned char address )
{
unsigned char i,temp=0x00;
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
for (i=0;i<8;i++)
{
SCK=0;
temp>>=1;
if(SDA)
temp|=0x80;
SCK=1;
}
RST=0; _nop_();
SCK=0; _nop_();
SCK=1; _nop_();
SDA=0; _nop_();
SDA=1; _nop_();
return (temp);
}
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









