







1、简要介绍
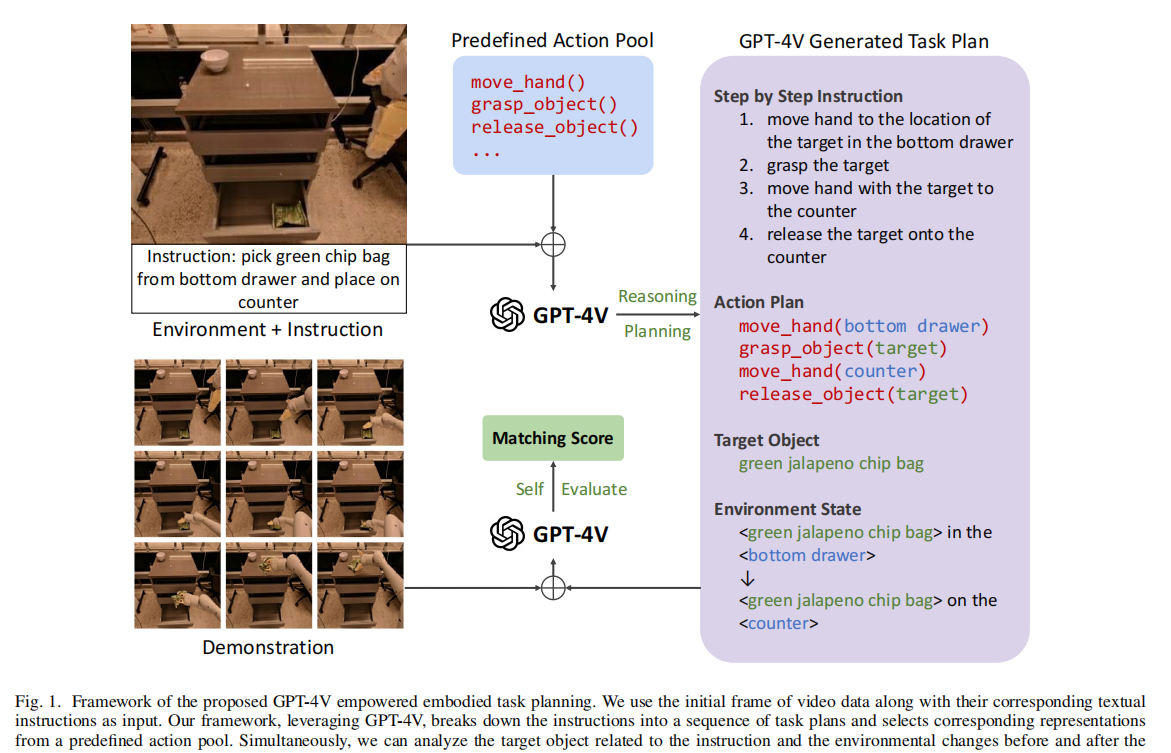
大型语言模型(LLM)经历了显著的发展,并越来越多地跨各个领域集成。值得注意的是,在机器人任务规划领域,LLM利用其先进的推理和语言理解能力,基于自然语言指令制定精确和高效的行动规划。然而,对于机器人与复杂环境交互的具体化任务,由于与机器人视觉感知缺乏兼容性,纯文本LLM经常面临挑战。本研究提供了一个新兴的LLM和多模态LLM集成到各种机器人任务的全面概述。此外,论文还提出了一个利用多模式GPT-4V,通过结合自然语言指令和机器人视觉感知来增强具身任务规划的框架。基于不同数据集的结果表明,GPT-4V有效地提高了机器人在具体化任务中的性能。对各种机器人任务中的LLM和多模态LLM的广泛调查和评估丰富了对以LLM为中心的具身智能的理解,并为弥合人类-机器人-环境交互中的差距提供了前瞻性的见解。
2、背景
随着预训练模型在模型规模和数据量方面都有所扩展,一些大型预训练模型在一系列复杂任务中表现出了显著的能力。大型语言模型(LLM)由于其特殊的上下文出现能力,在各个领域获得了广泛的关注。这种新兴的能力以前所未有的方式赋予了人工智能算法的权力,重塑了人们利用人工智能算法的方式,并促使人们对人工通用智能(AGI)应用的可能性进行重新评估。 随着LLM的快速发展,利用指令调优和对齐调优已成为使它们适应特定目标的主要方法。在自然语言处理(NLP)领域,LLM在某种程度上可以作为语言相关任务的通用解决方案。这些基于transformer的大型模型在多个领域展示了非凡成就,深刻地改变了人工智能的技术水平。研究范式也转向用于解决特定领域的问题。在计算机视觉(CV)领域,研究人员也在开发大型模型,类似于GPT-4和Gemini ,它结合了视觉和语言信息,从而支持多模态输入。这种增强LLM的策略不仅提高了它们在下游任务中的性能,而且通过确保与人类的价值观和偏好保持一致,为机器人技术的发展提供了重要的指导。这种方法已被广泛应用于许多领域,甚至是在卷积神经网络(CNNs)一直是主要技术的领域。 LLM处理和内化大量文本数据的能力为增强机器的理解和自然语言分析能力提供了前所未有的潜力。这种能力扩展到理解手册和技术指南等文档,并将这些知识应用于连贯、准确和与人一致的对话。通过对话,自然语言指令从文本提示翻译成机器可理解的代码,触发相应的动作,从而使机器人更具适应和灵活地容纳广泛的用户命令。将真实世界的传感器模态集成到语言模型中,有助于建立语言和感知之间的联系,使它们能够在各种特定任务中应用。然而,只有文本的LLM缺乏对物理世界的体验经历和观察的经验结果,这使得在特定环境中使用它们进行决策具有挑战性。因此,将多模态纳入LLM对于有效执行机器人任务至关重要。此外,机器人技术领域在任务中呈现出更微妙的变化。与NLP和CV不同,它们可以利用来自互联网的广泛数据集,获取大型和多样化的机器人交互数据集是困难的挑战。这些数据集通常要么关注单个环境和对象,要么强调特定的任务域,从而导致它们之间的巨大差异。当将LLM与机器人技术集成时,这种复杂性带来了更重大的挑战。 如何克服机器人技术带来的挑战,并利用LLM在其他领域的成就,使机器人领域收益,是本综述的核心问题。在本文中,该工作的贡献可以总结为四个要点。 •论文精心调查和综合现有的LLM,探索三个不同任务类别的最新进展:规划、操作、推理。 •论文总结了LLM在机器人领域提供的主要技术方法,研究了训练广义机器人策略的潜力,并为该领域的研究人员提供了一个基础性的调查。 •论文评估了多模态GPT-4V在不同环境和场景下的机器人任务规划中的有效性。 •论文总结了论文的调查的关键发现,仔细讨论了在未来的努力中需要解决的突出挑战,并提出了一个前瞻性的观点。
3、机器人任务范围
3.1 规划
1)自然语言理解:在机器人规划中,大型语言模型因其先进的自然语言理解能力而表现出色。它们将自然语言指令翻译为机器人的可执行动作序列,这是机器人规划的一个关键方面。本研究表明,即使没有视觉输入,LLM也可以仅根据语言指令生成准确的动作序列。通过少量的视觉信息,他它们的性能得到了显著的提高,使它们能够创建精确的视觉-语义规划。这些规划将高级自然语言指令转换为虚拟代理承担复杂任务的可操作指导。这种能力强调了LLM集成多模态信息的潜力,从而提高了它们的理解能力。它还展示了它们解释和合并来自各种模式的信息的能力,从而导致一个更全面的任务理解。此外,从自然语言理解的大型语言模型中生成动作序列的研究进一步证实了LLM在机器人规划中的有效性。LLM在与物理环境同步地解释自然语言命令方面也显示出了巨大的前景。使用接地解码方法,它们可以产生与物理模型的概率相一致的行为序列,这展示了该方法在机器人规划任务中的有效性。
对复杂顺序任务规划的研究突出了LLM能力的重大进展。Text2Motion的研究表明,LLM不仅擅长处理语言信息,而且还擅长处理技能序列中的依赖关系。这是通过几何上可行的规划实现的,标志着抽象指令解释和理解复杂任务结构的关键进展。此外,LLMPlanner研究通过将LLM与传统规划器集成,提高了它们在机器人规划中的自然语言理解能力。这种协同作用说明了如何利用LLM的NLP熟练度来提高规划任务的效率和精度。此外,LLM+P利用了经典规划者的能力,使用规划领域定义语言(PDDL)和问题线索来为LLMs创建特定任务的问题文件。这种整合显著提高了LLM在处理长期规划任务方面的效力。此外,SayPlan通过整合一个经典的路径规划器来解决规划范围的问题。通过这样做,SayPlan能够建立来自抽象和自然语言指令的大规模、长期的任务规划,使移动操作机器人能够成功地执行它们。此外,LLM在搜索算法中显示出了作为启发式策略的潜力,同时也作为常识性知识的宝库。LLM的这种双重作用不仅增强了这些算法的推理能力,而且有助于预测潜在的结果。这种方法充分利用了LLM的潜力,利用它们的高级推理能力来有效地规划复杂的任务。这种双重应用强调了大型语言模型在任务规划和解决问题解决方面的广泛和通用的潜力。
对LLM进行的研究显示了它们解析和理解自然语言理解的非凡能力。这种能力延伸至不仅仅是文本匹配到深刻的语义理解,还包括任务的目的和上下文。LLM的一个关键方面是将它们所理解的指令转换为机器人的可执行动作序列&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 602
602

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









