







原题见PDF204页
动态规划和分治法的区别不在这细说,很容易能够百度查到。主要想详细的记录一下动态规划的求解中不采用递归,而是借助辅助空间来更快的求解。(递归求解时间代价O(2^n),动态规划求解时间代价O(n^3))
A0A1A2A3A4A5
定义:
A[i]的维数为p[i]×p[i+1]
m[i][j]为重A[i]乘到A[j]标量乘法运算的最小次数。(m[i][j]=0,当i==j时)
加入要求解的是m[0][2],则m[0][2]为m[0][0]+m[1][2]+p[0]p[1]p[3];m[0][1]+m[2][2]+p[0]p[2]p[3]中的最小值。
递归式为:

下面通过一个表格来说明如何借助辅助空间实现更快的求解。
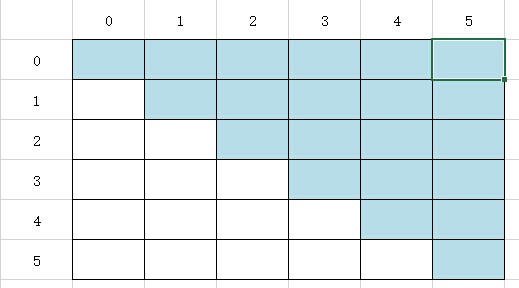
这个表格可以看成是二维数组m,而我们想要求解A0A1A2A3A4A5的最小乘法运算次数就是求m[0][5];
当我们按照前面的递归去求解m[0][5]时,其实就是在逐渐的把这个表蓝色部分的数据给填完整,在动态求解中有很多的子问题被重复的利用,如果使用递归就会重复的求解,所以使用这样一个辅助空间来存储已经求解过的值,再次使用时所消耗的时间代价只是O(1),但是需要耗费O(n^2)的空间来存储。但其实二维数组使用到的只是蓝色部分。
在求解这个表中的数据时,应当从左至右求解,我个人理解这就是动态规划里说的从下至上求解。
下面是C+
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3641
3641

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









