






交通灯管理系统,这个是当年软通动力的面试题,也不晓得如今的面试题是否差不多的难度设置,不管如何,跟着张孝祥老师的视频完成了一遍,在此做个回顾和总结。
先来看下该交通灯管理系统的需求。
1.异步随机生成按照各个路线行驶的车辆。例如:
由南向而来去往北向的车辆 ---- 直行车辆
由西向而来去往南向的车辆 ---- 右转车辆
由东向而来去往南向的车辆 ---- 左转车辆
... ...
2.信号灯忽略黄灯,只考虑红灯和绿灯。
3.应考虑左转车辆控制信号灯,右转车辆不受信号灯控制。
4.具体信号灯控制逻辑与现实生活中普通交通灯控制逻辑相同,不考虑特殊情况下的控制逻辑。
注:南北向车辆与东西向车辆交替放行,同方向等待车辆应先放行直行车辆而后放行左转车辆。
5.每辆车通过路口时间为1秒(提示:可通过线程Sleep的方式模拟)。
6.随机生成车辆时间间隔以及红绿灯交换时间间隔自定,可以设置。
7.不要求实现GUI,只考虑系统逻辑实现,可通过Log方式展现程序运行结果。现实情况中,国人能严守交通规则的都不多,好好研究过十字路口交通灯的估计更少,好在自己拿过驾照,总算是有所了解,因此,张老师预先设置好的交通灯规则对我来说还是蛮好理解的。这里也根据草图来说:
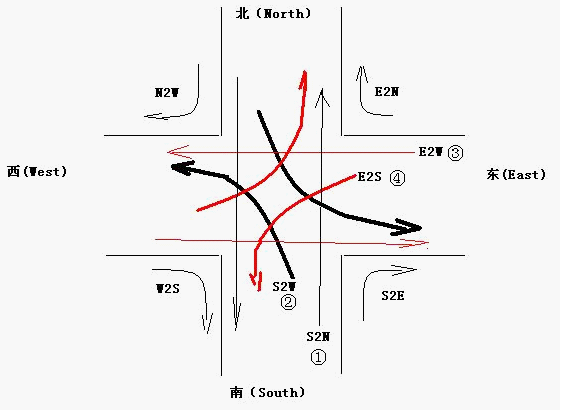
一般情况下,十字路口右转是不需要遵循交通灯的变化的,因此我们先确定主要考虑直行和左转的交通灯与汽车的协同情况。从上图中不难看出,在这个系统中总共有十二条路线,除了四个右转的路线,其他八条路线都是两两对应,同时以初始方向为基点来考虑的话,可以将这八条路径分为主变化和伴随变化的四组。由于具体需求中说明了只需要考虑红灯和绿灯两种情况,因此可以设计为亮状态为绿灯,暗状态为红灯。四个右转路线可以一直通行,所以把它理解为一直都是绿灯的状态。
我们确定了有十二个方向的路线,自然的就有确定不变的十二个对应的交通灯,我们以枚举形式来定义它们是很方便的,下满来看Lamp类部分的代码。
public enum Lamp {
S2N("N2S","S2W",false),S2W("N2E","E2W",false),E2W("W2E","E2S",false),E2S("W2N","S2N",false),
N2S(null,null,false),N2E(null,null,false),W2E(null,null,false),W2N(null,null,false),
S2E(null,null,true),E2N(null,null,true),N2W(null,null,true),W2S(null,null,true);
private Lamp(String opposite,String next,boolean lighted){
this.opposite = opposite;
this.next = next;
this.lighted = lighted;
}
private Lamp(){}
private boolean lighted;
private String opposite;
private String next;
public boolean isLighted(){
return lighted;
}
public void light(){
this.lighted = true;
if(opposite != null){
Lamp.valueOf(opposite).light();
}
System.out.println(name() + " lamp is green, 下面总共应该有6个方向能看到汽车通行!");
}
public Lamp blackOut(){
this.lighted = false;
if(opposite != null){
Lamp.valueOf(opposite).blackOut();
}
Lamp nextLamp = null;
if(next != null){
nextLamp = Lamp.valueOf(next);
System.out.println("绿灯从" + name() + "-------->切换为" + next);
nextLamp.light();
}
return nextLamp;
}
}每个Lamp对象的亮黑状态用lighted变量表示,S2N、S2W、E2W、E2S这四个方向的交通灯作为主变化交通灯,这四个主变化交通灯依次轮询变亮,N2S、N2E、W2E、W2N为对应的伴随变化灯。opposite变量用来表示伴随变化灯,而next变量则表示当前主变化灯亮过后下一个亮的主变化灯。light()和blackOut()方法控制灯的明暗变化。除了主变化交通灯,其他交通灯都是不带有opposite和next参数的,所以直接就赋值为null,否则会使明暗方法进入死循环。除四个右转交通灯一直为代表亮的true外,其他交通灯的初始状态都为代表暗的false。
再来看Road类和LampController类部分的代码。
public class Road {
private List<String> vehicles = new ArrayList<String>();
private String name = null;
public Road(String name){
this.name = name;
ExecutorService pool = Executors.newSingleThreadExecutor();
pool.execute(new Runnable(){
public void run() {
try {
Thread.sleep((new Random().nextInt(10) + 1) * 1000);
} catch (InterruptedException e) {
e.printStackTrace();
}
for(int i=1; i<1000; i++){
vehicles.add(Road.this.name + "_" + i);
}
}
});
ScheduledExecutorService timer = Executors.newScheduledThreadPool(1);
timer.scheduleAtFixedRate(
new Runnable(){
public void run() {
if (vehicles.size()>0) {
boolean lighted = Lamp.valueOf(Road.this.name).isLighted();
if (lighted) {
System.out.println(vehicles.remove(0) + " is traversing !");
}
}
}
},
1,
1,
TimeUnit.SECONDS);
}
}public class LampController {
private Lamp currentLamp;
public LampController(){
currentLamp = Lamp.S2N;
currentLamp.light();
ScheduledExecutorService timer = Executors.newScheduledThreadPool(1);
timer.scheduleAtFixedRate(
new Runnable(){
public void run(){
currentLamp = currentLamp.blackOut();
}
},
10,
10,
TimeUnit.SECONDS);
}
}每个Road对象都有一个name成员变量代表方向,一个vehicles成员变量代表各个方向上的车辆集合。在Road对象的构造方法中用线程池启动一个线程每隔一个1~10秒钟的随机时间向vehicles集合中增加一辆车。同时启动一个定时器,每隔一秒检查该方向上的交通灯是否为绿灯,是则将集合中的第一辆车移除,并打印一下情况。
整个交通灯管理系统中只能有一套交通灯控制系统,所以LampController类被设计成了单例。LampController构造方法中设定了一个起始为绿的交通灯,这当然是必须的。同样的,该构造方法中也定义了一个定时器每隔10秒轮询变化交通灯的状态。
最后看下主函数,整个系统也就完整了。
public class MainClass {
public static void main(String[] args) {
String[] directions = new String[]{
"S2N","S2W","E2W","E2S","N2S","N2E","W2E","W2N","S2E","E2N","N2W","W2S"
};
for(int i=0; i<directions.length; i++){
new Road(directions[i]);
}
new LampController();
}
}














 507
507











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









