







方法一:使用iTunes上传APP
1.安装证书关于发布证书的申请和添加在次就不在详情介绍了,可以参考发布证书申请安装**
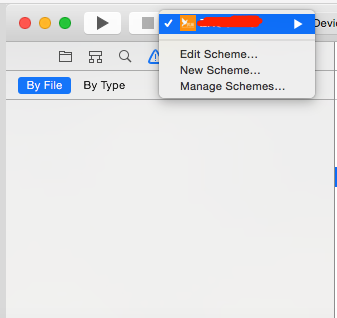
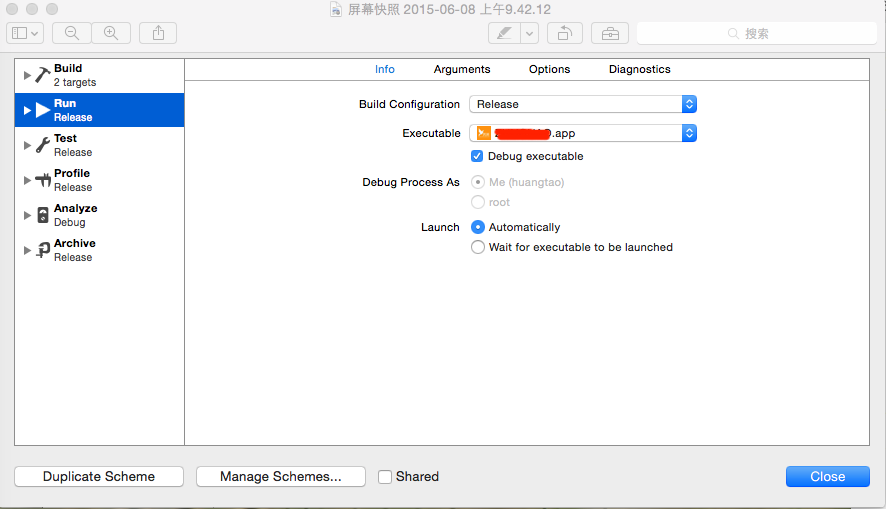
2.进入Edit Scheme…将Run>Build configuration中的Dubug改成Release
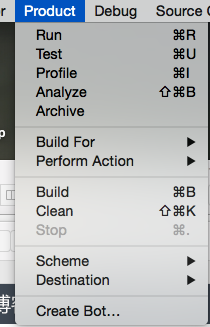
3.Archive
4.先Validate…在Submit to App Store …
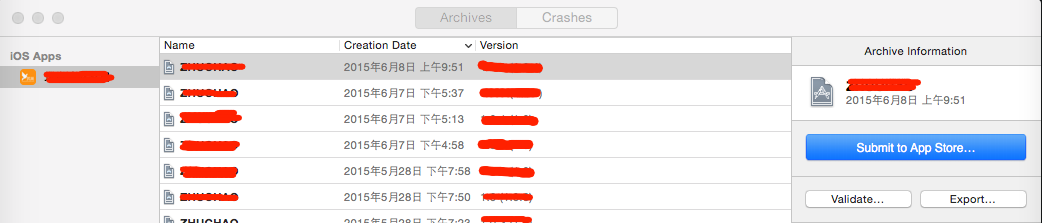
然后就可以到iTunesConnect,自己创建的APP的预发行版本

重点介绍
方法二:使用Application Loader
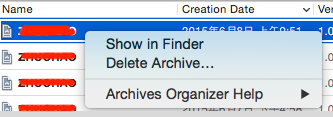
1.同方法一,到第3步,Archive,右键你想要上传的文件>Show in Finder >找到你要上传的.xcarchive文件,右键显示包内容
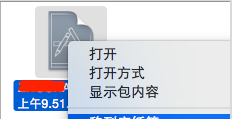
将Products文件夹>Applications文件夹中的.app包,拷贝到桌面,备用。
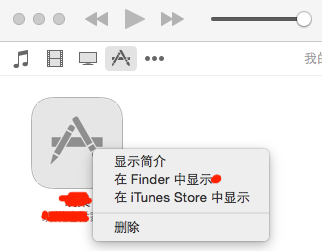
2.打开iTunes将桌面的.app包拖到“我的应用程序”,然后找到你拖进去的程序
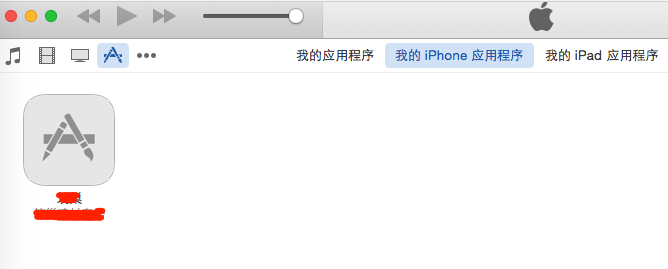
3.右键在Finder中显示
4.找到.ipa文件,拷贝到桌面,备用
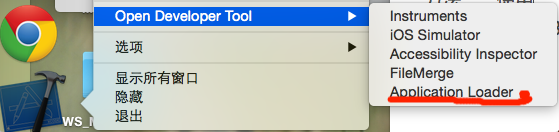
5.打开,Application Loader ,打开方法,Xcode 右键>Open Developer Tool >Application Loader ,如图
6.双击“交付你的应用程序”,选择你存放到桌面的.ipa包,然后你可以看见你的APP的信息。

7.然后,点击下一步

8.点击“发送”,可以看见上传进度
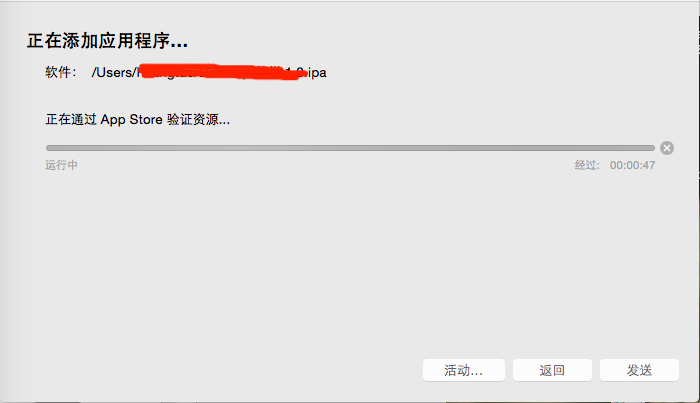
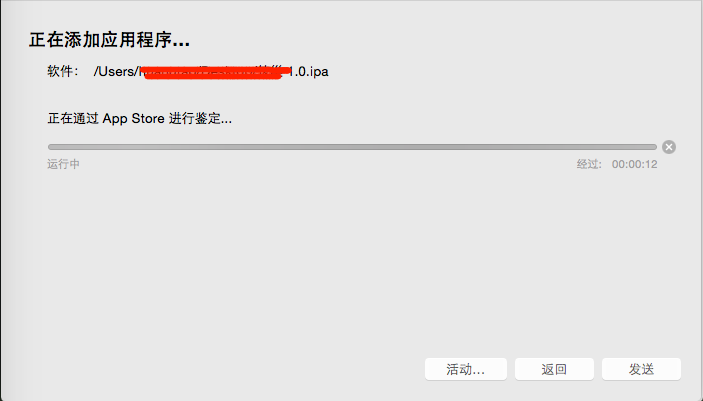
8.上传完成之后你,就可以在iTunesConnect,自己创建的APP的预发行版本中,看见,上传版本的状态,正常情况会等几分钟
方法二与方法一相比,个人感觉,方法二更快,更直观,能够看见上传进度。我曾经用方法一上传了N多次,失败后。改用方法二,目前没有几次失败
以上上传APP操作内容,很多步骤,都省略,如有问题,请私信或者留言















 1222
1222

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









