






无人船 无人艇路径跟踪控制 fossen模型matlab simulink效果
基于观测器的LOS制导结合反步法控制
ELOS+backstepping
YID:99188660989622243
好的0413
无人船和无人艇的路径跟踪控制一直是无人船技术领域的热点问题之一。在这个领域中,FOSSen模型是被广泛应用的一种模型。在本文中,我们将介绍基于观测器的LOS制导结合反步法控制,并通过ELOS和backstepping方法来实现路径跟踪控制。
首先,我们来介绍FOSSen模型。FOSSen模型是一种常用的无人船模型,它可以通过MATLAB和Simulink进行仿真和控制效果的评估。该模型基于水动力学理论,考虑了无人船的质量、浮力、阻力以及非线性因素等,可以准确描述无人船在水中的运动。
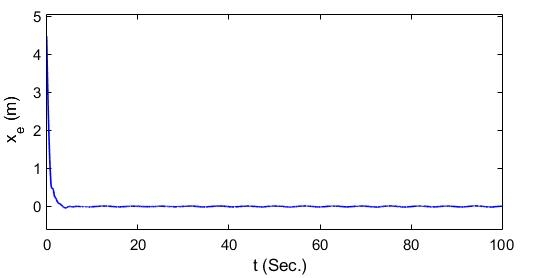
路径跟踪控制是指无人船能够按照预定的路径进行运动,并保持在该路径上。为了实现路径跟踪控制,我们可以采用基于观测器的LOS制导结合反步法控制方法。LOS制导是一种常用的路径跟踪控制方法,它通过计算无人船当前位置与目标路径之间的偏差,来确定船体应该采取的控制行动。
在LOS制导的基础上,我们可以结合反步法控制来实现更精确的路径跟踪控制。反步法控制是一种用于非线性系统控制的方法,它通过逐步构造控制器,将系统的控制问题转化为一系列子问题。通过将问题拆分为多个子问题,我们可以逐步逼近最优解,并实现更精确的控制效果。
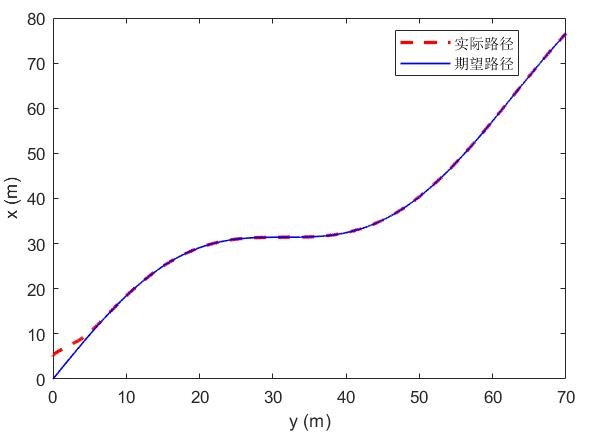
在本文中,我们使用ELOS和backstepping方法来实现基于观测器的LOS制导结合反步法控制。ELOS是一种改进的LOS制导方法,它考虑了无人船的速度和加速度信息,可以提高路径跟踪的准确性。而backstepping方法则是一种用于非线性控制的常用技术,通过逐步构造控制器,并考虑非线性因素,可以有效解决路径跟踪控制中的动态问题。
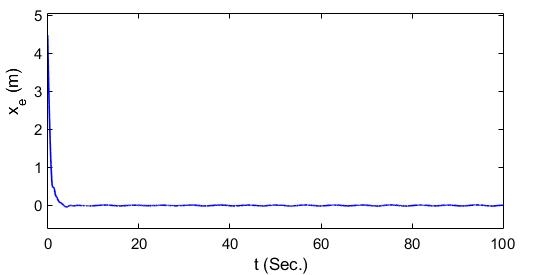
通过在MATLAB和Simulink中建立相应的模型,我们可以对基于观测器的LOS制导结合反步法控制进行仿真和效果评估。通过调整控制器的参数和路径参数,我们可以得到不同条件下的控制效果,并对比评估不同方法的优劣。
总的来说,基于观测器的LOS制导结合反步法控制是一种有效的路径跟踪控制方法。通过结合ELOS和backstepping方法,可以提高路径跟踪的准确性和稳定性。在实际应用中,可以根据具体的需求和场景,选择合适的控制方法和参数,以实现无人船的精确路径跟踪控制。
综上所述,本文介绍了基于观测器的LOS制导结合反步法控制的方法,在FOSSen模型上进行了仿真和效果评估。通过对比不同方法的控制效果,我们可以得出结论,该方法可以有效实现无人船和无人艇的路径跟踪控制。未来的研究中,可以进一步优化控制器的设计,提高路径跟踪的效果。同时,在实际应用中,还可以考虑更多的环境因素和动态条件,以适应不同场景下的无人船控制需求。
以上相关代码,程序地址:http://wekup.cn/660989622243.html



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









