







 本文详细介绍了在Ubuntu20.04系统上安装ROS(机器人操作系统)及其版本11,包括配置软件源、安装步骤、Gazebo11的安装、模型库下载与导入,以及运行过程中遇到的常见问题如gzserver和gzclient卡顿的解决方法。
本文详细介绍了在Ubuntu20.04系统上安装ROS(机器人操作系统)及其版本11,包括配置软件源、安装步骤、Gazebo11的安装、模型库下载与导入,以及运行过程中遇到的常见问题如gzserver和gzclient卡顿的解决方法。
series:
Gazebo学习(一)Ubuntu20.04安装ROS+gazebo11+模型库导入(汇总跳转连接+个人安装记录)_gazebo模型库-CSDN博客
Gazebo学习(二)Ubuntu20.04配置RotorS+Gazebo11_rotors simulator ubuntu20.04-CSDN博客
一、安装ROS
*参考教程:详细介绍如何在ubuntu20.04中安装ROS系统,超快完成安装(最新版教程)_ubuntu20.04安装ros-CSDN博客
**保姆级教程,甚至包括了怎么配置快速的软件源!有手就可以!个人中途遇到的所有报错大佬都给出了相应的解决方案,非常丝滑的安装过程!**
二、安装gazebo11以及下载导入模型库
*参考教程:Ubuntu 20.04 Gazebo安装 及模型库下载_sudo sh -c 'echo "deb http://packages.osrfoundatio_Ananke_Z的博客-CSDN博客
**由于是新手有一些中途tips在原作者的基础上也写在下面了**
1、接收软件
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
2、设置密钥
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -3、安装gazebo
sudo apt-get updatesudo apt-get install gazebo11sudo apt-get install libgazebo11-dev4、检查安装
gazebo5、获得模型库
(1)打开/.gazebo文件夹
由于文件夹是隐藏状态,打开主文件夹摁“ Ctrl + H ”可以显示隐藏文件夹

(2)下载模型
git clone https://github.com/osrf/gazebo_models下载完毕后得到模型库加载到/.gazebo/gazebo_models文件夹当中
(3)将模型加载到gazebo里
a.方法一(更推荐,一劳永逸):将下载模型库导入到gazebo
sudo cp -r ~/.gazebo/gazebo_models/* /usr/share/gazebo-11/models** 不要忘记*号喔,如果是整体以一个文件夹复制过去在gazebo里检测不到(雾 **
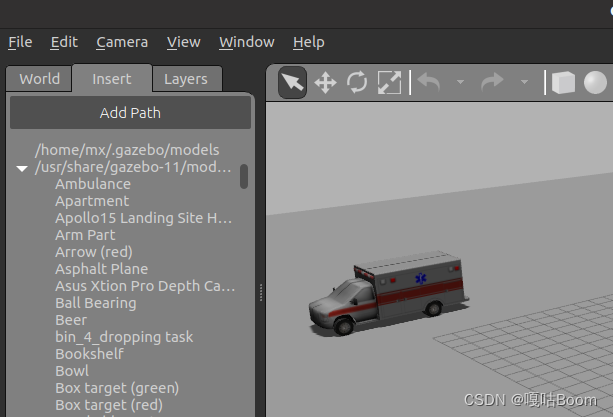
然后就可以在gazebo的Insert处打开看到自己导入的模型了
b.方法二(重开就又需要重新add path了):直接在gazebo里导入现在的路径
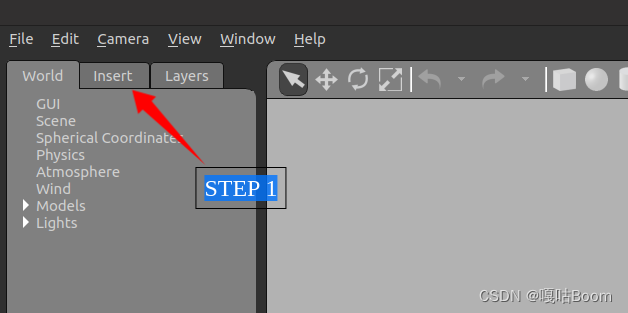
STEP1:打开gazebo右上角找到插入
STEP2:选择添加路径
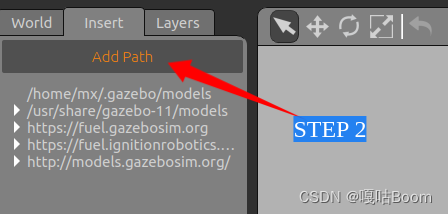
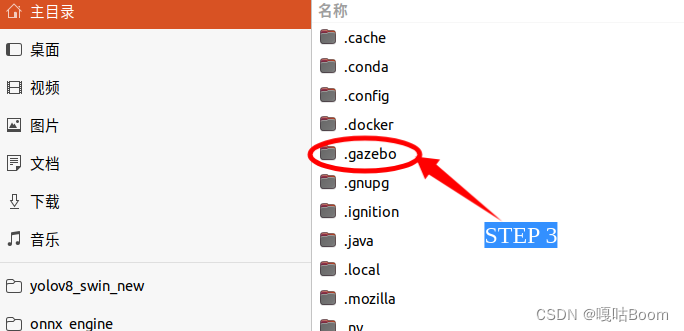
STEP3:添加路径 ~/.gazebo/gazebo_models
*注:此处在主目录如果没找到.gazebo文件夹同样可以通过" Ctrl + H "显示隐藏文件夹
完成步骤后就也可以在Insert栏对应添加路径展开栏里看到自己导入的模型啦
6.其他关联安装包(需要先安装ROS,否则会有报错)
sudo apt-get install ros-noetic-rvizsudo apt-get install ros-noetic-robot-state-publishersudo apt-get install ros-noetic-gazebo-ros-pkgs ros-noetic-gazebo-ros-controlsudo apt install ros-noetic-moveitsudo apt-get update三、运行gazebo出现相关问题解决
1、gazebo上一次运行结束/卡顿,无法再次启动的问题:
*参考教程:无需重装,一个命令解决Gazebo 无法启动(非首次安装)问题_gzserver: 未找到进程-CSDN博客
省流版:
(1)查看当前所有进程
sudo top(2)找到gzserver进程,第一列进程号a
*注:a是具体数字!比如下图对应a应该为2361
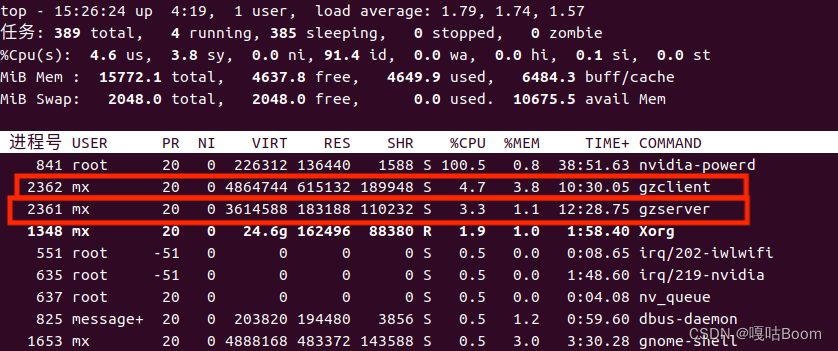
(3)关闭sever,重新打开
sudo kill a2.gazebo上一次运行无响应,卡住一个小框在最上层
(1)查看当前所有进程
sudo top(2)找到gzclient进程,第一列数字代号a
*注:a是具体数字!比如下图a对应为2362
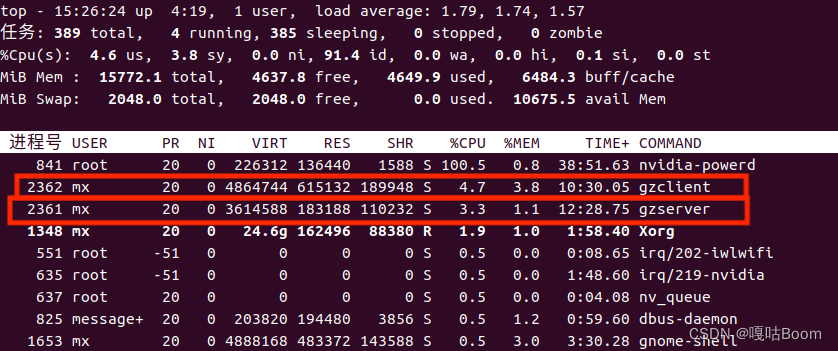
(3)关闭client,卡住的框也会随之消失
sudo kill a

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









